
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その10
卓上レイアウトで楽しもう 自動運転 その10
今回の内容は、先回と同じレイアウトと制御ロジックを使用して反対側のホームにも制御を追加しました。 さらももうひと列車を入線させて、合計3列車を同時運転させようと試みましたが、ことはそう簡単ではありませんでした。
.
■ 反対側のホームの制御
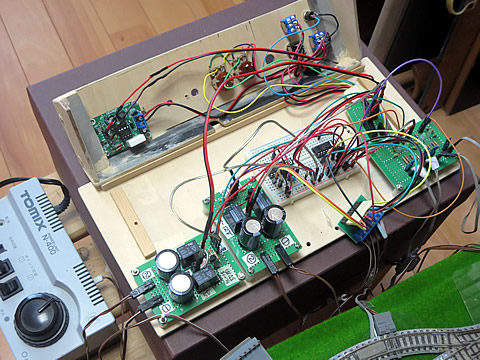
駅構内としての制御は、先回の実験と同じなので同様の制御を追加しました。 制御用マイコンは独立したPIC16F1827 を追加して回路を組みました。 関係する制御機器は既に使用していたユニットをそのまま使用いています。
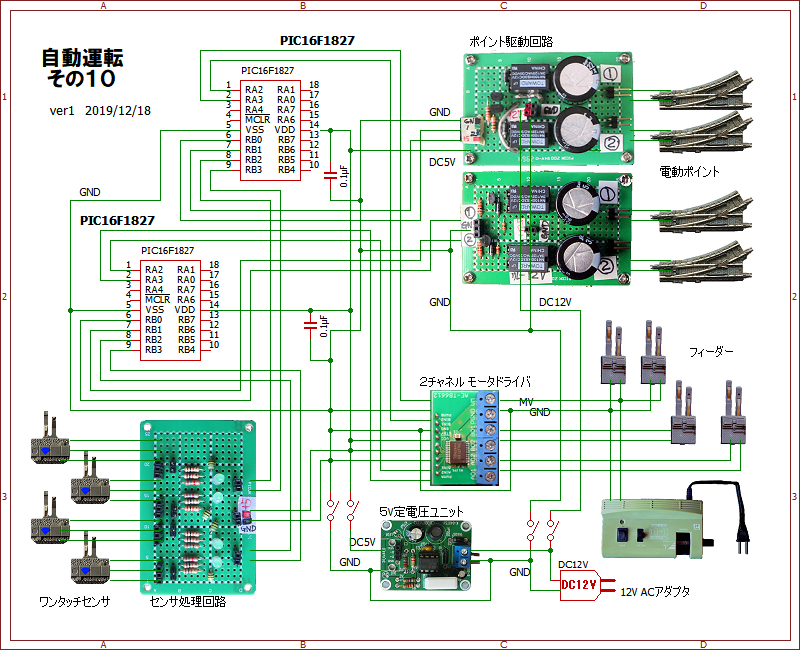
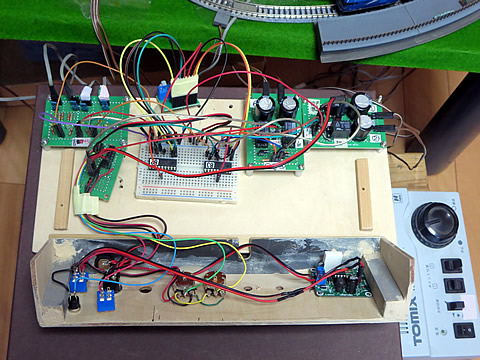
回路構成の状態を下に示します。 追加した PIC マイコンは同じブレッドボード上に装着し、周辺のユニットとはいつもの様にジャンパー線で結線しています。
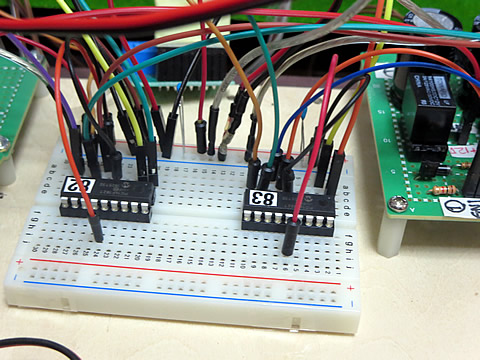
PICマイコンは、識別のために番号ラベルを貼っています。
■ スジ屋ごっこの楽しみ
自動運転を実施するための運行ダイヤは、先回のロジックをそのまま使用する事が出来ませんでした。 その理由は運行ダイヤのスジを引いてみると明らかです。
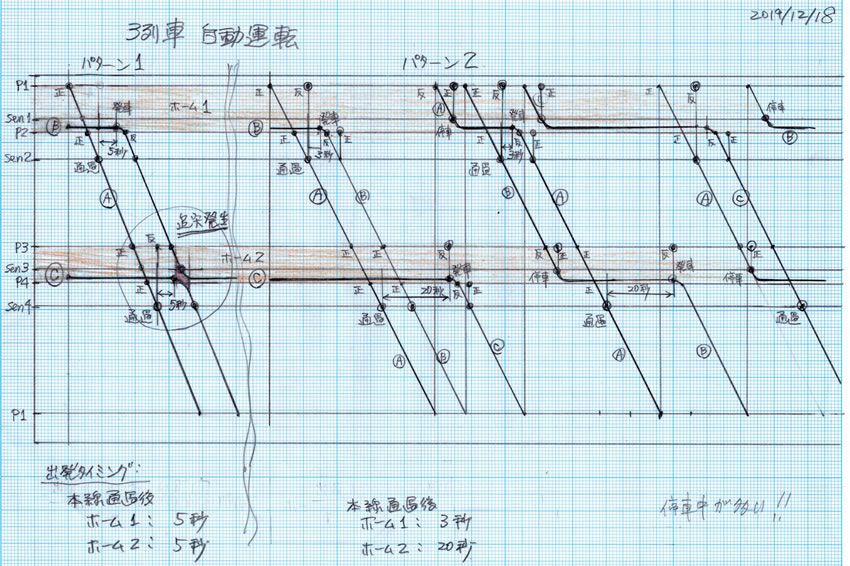
上のダイヤの左側に引いたパターン1は、ホーム1とホーム2は同じロジックで制御した場合を示します。 追い抜き列車が通過後の5秒後に停車中の列車を発車させようとするもので、2列車での運行では問題ないものの、3列車となると追突事故が発生するのです。
 .
.
前の駅(ホーム)にて5秒後に発車した列車がすぐ後に付いてきていますので、ホーム2では同じように5秒後での発車ではぶつかってしまうのは明らかです。 もう少し待ってから発車する必要があります。
****************************************
上記のパターン2の場合は、ホーム1では3秒と設定し、ホーム2ではどのくらい待たせれば良いか、書いては消しての線引きを何度も検討しました。 各列車の速度の違いや駅間の距離の違いを考慮して設定したのですが、図のように20秒という待ち時間となりました。
これでは、停車時間が長すぎるので、他のアイディアがないのか、何枚ものスジを引いてみました。 そのための用紙は右の写真のように何枚もかいたものの、途中で投げ出したものも、いくつもありました。 でも、パズルを解いているようで楽しかったです。
****************************************
採用できそうな案について実際にプログラム化して運行することにします。 まず最初に、上記のパターン2について実施しました。
■ プログラムの内容
運行ダイヤに従ってプログラムを組んで見ました。 使用したソフトは、ノートパソコン Panasonic CF-N10 にインストールした MPLAB X v5.30 、Cコンパイラは XC8 v2.10 です。 書き込みは PICkit 3 を使い、ICSP書込みアダプタ(秋月製 AE-PICKIT-ライト)を使用した。 PICマイコンは、 PIC16F1827を使用しました。
プログラム内容は、先回と同じで、82行目の __delay_ms(5000); と記述した5秒待ち遅延を、3秒と20秒に設定した二つのプログラムを用意して、それぞれのPICマイコンに書き込みました。 今回の設定では、__delay_ms(5000) は、最大で 25,231msec まで指定できますので、20秒設定が可能でした。
■ 作動状態
運行状況を下に紹介します。



 .
.
運行状態は動画のとおりですが、最初のスタート手順も撮影しました。 ポイントチェック後に停車中の列車がピクリと動くのが気になります。 これは初期値設定の問題と判断します。 また、どこかのセンサやポイントの作動が不良であると、それによってシーケンスが狂ってしまい、すぐに事故が発生します。
最初は、プログラムなのか回路なのか迷ううのですが、正常な状態で機能することが確認出来た後では、センサとポイントの動作の信頼性ですね。
しかし、やはり停車時間が長いようですね。 また、スタート位置を右のような配置にするとスムースに運行を開始するようです。
次回は、もう一つの運行パターンを紹介します。
2019/12/21 作成