
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 各ユニットの見直し
卓上レイアウトで楽しもう 各ユニットの見直し
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 先回の電気系回路構成の見直しに引き続き、各制御ユニットの回路についても修正を実施しました。
■ ポイント駆動ユニットの修正
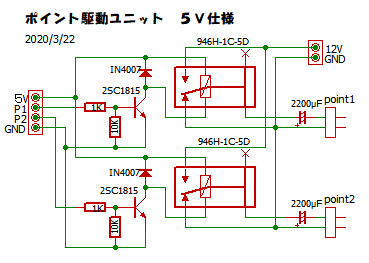
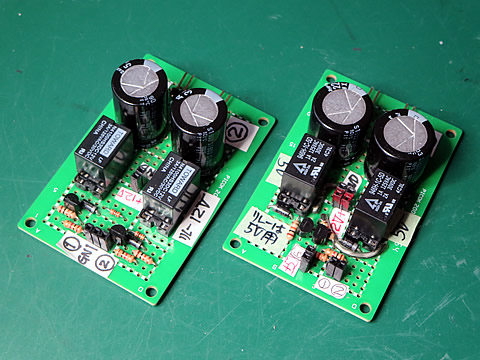
ポイント駆動ユニットは、これも露太さんのサイトのアドバイスをもとに、通常時はコンデンサが放電状態になるように構成し、工作時期の違いによって、5V仕様と12V仕様のリレーを使った二つのタイプを工作している。
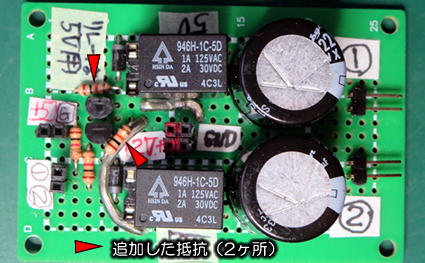
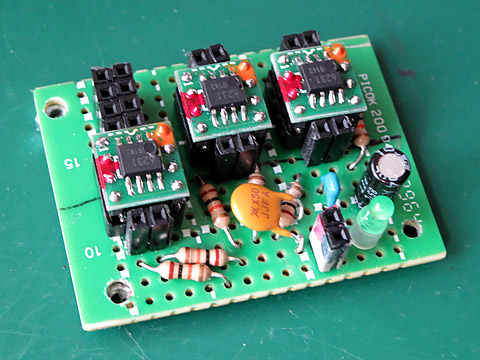
まず、5V仕様のリレーを使ったユニットから説明しよう。 コイル抵抗が125Ωなので、作動電流は40mAとなり、トランジスタ一段で充分制御可能としてドライバ部分を構成している。 この入力部は過電流防止の1KΩ抵抗だけを挿入していたが、今回はここにプルダウン抵抗として、10KΩの抵抗を追加工作した。 何とか隙間を設けて押し込んだ状態を下に示す。
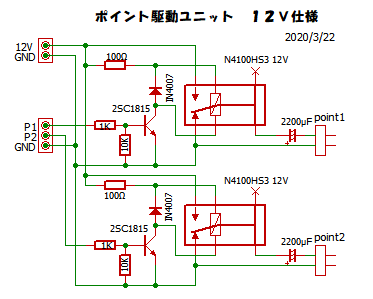
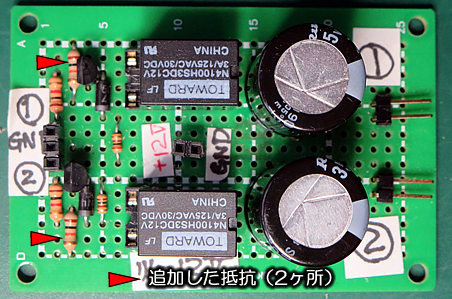
次に、 12V仕様のリレーを使ったユニットを下に示す。 リレーを駆動する電源は12Vを使用するため5V電源は使いません。 今回はここにプルダウン抵抗として、10KΩの抵抗を追加工作した。
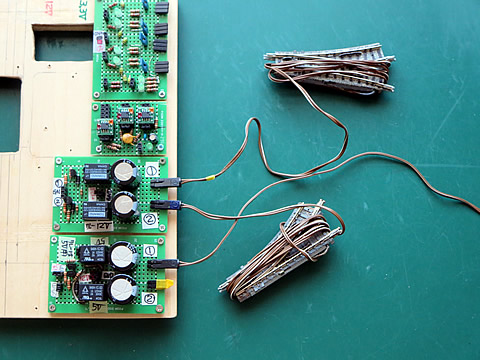
この二つの、合計で4本のポイント駆動回路を制御ボックス内に取り付けて、TOMIXの電動ポイントのコネクタに接続します。
 .
.
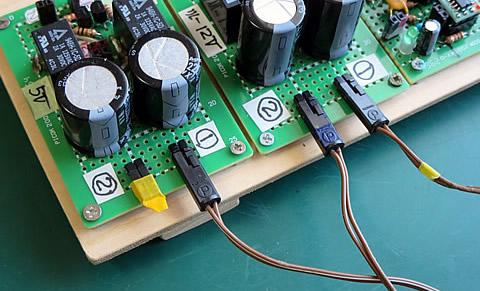
その接続部を右に示します。 ピンヘッダを水平に取り付けていますのでここにソケットを差込めば良いのですが、表が裏かは明記していません。 配線した後で、定位がどちらになっているのかをテックして、もし反対であれば差し替えれば良いと考えています。
また、回路を使用しない場合に間違えて駆動した場合は、触れると感電やショートの恐れがありますので、金属端部を切り取ったジュンク品のピンソケットを被せています。 家庭用コンセントのように電源の上流側はメス型になっていれば安全ですが、TOMIXの設計思想は逆になっていますので、この様は配慮が必要です。
また、今回の入力部にプルダウン抵抗を追加したことで、使用しない場合のGND配線が不要になった事は、配線の簡素化にもなっています。 入力部を未接続にしてもプルダウン抵抗を介してGND に接続されているからです。、
■ 給電制御ユニットの修正
 .
.
次に、給電制御回路を説明します。 このユニットはいろいろ実験してきました。
コントローラからの給電をON/OFF切り替えるリレーモジュールを使ったり、秋月で見つけたモータドライバTB6612使用した Dual DCモータードライブキット、同じ系列の容量の大きいモータドライバTB6643 を使ったりしてきましたが、現在はBD6231のモータドライバに落ち着いています。
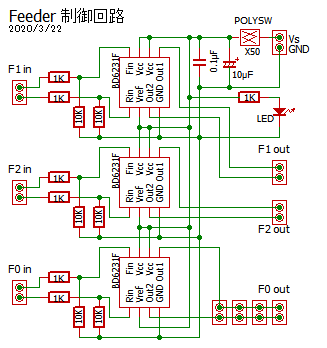
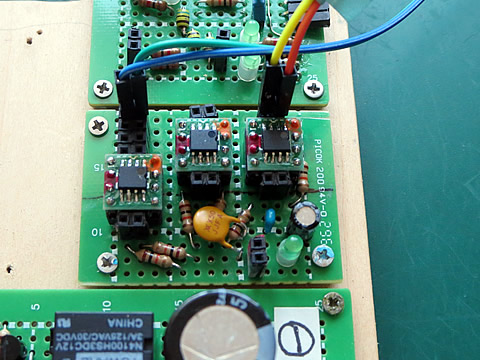
その回路構成を左に示します。 フィーダ回路は、0番、1番、2番と3回路を設け、それぞれ正逆方向を制御出来るようにしています。 0番回路は一般走行路用として同時に4本のフィーダー線が取り出せるようにしています。 これは、「自動運転 その21」(2020/2/19)のレイアウトでも対応できるようにしたものです。
今回は、この入力回路ににもプルダウン抵抗を追加しました。 場所的には苦しかったのですが無理やり取り付けています。 下の写真。
でも、このプルダウン回路の追加によって、ポイント駆動ユニットと同様に、使用しない場合のGND配線が不要になった事は、配線の簡素化にもなっています。 このメリットは大きいですね。 給電ユニットに於いては、車両の脱線による線路間のショートや、動力車のモータ焼損などによって過大電流が流れる恐れがありますので、ユニット内にポリスイッチを設けています。0.5A仕様のX50を用いています。
フィーダー線との接続は、少し長めで太めのジャンパー線を使って接続しています。 ただ単にはめているだけなのでよく外れてしまいますので接続後はテープを巻くようにして抜け止めにしています。 下の写真。
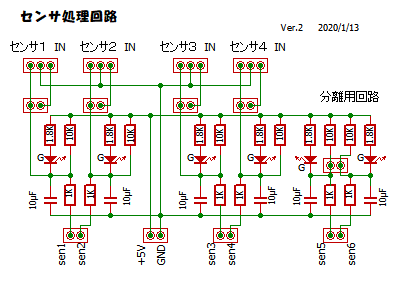
■ 通過センサ処理ユニットの修正
今回、追加工作はありませんが以前に実施していた工作部分を紹介しておきます。 TOMIX の通過センサーから送られてきたGND以外の2本の信号線は、ジャンパーピンを使って一つにしてマイコンに送信していました。 このジャンパーピンを外して別々の信号とすると、進行してきた方向を判別できるのです。 このための分離用回路を空いた空間に増設していました。
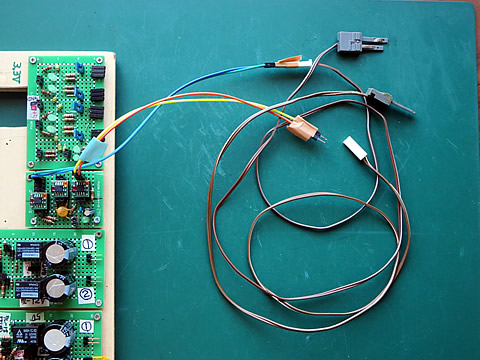
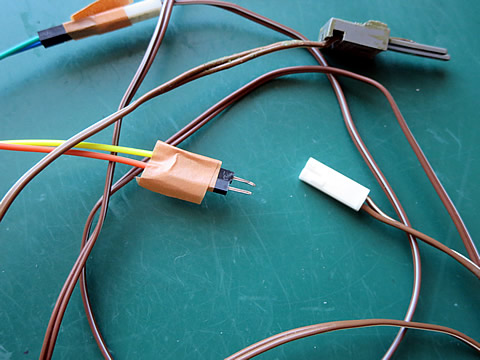
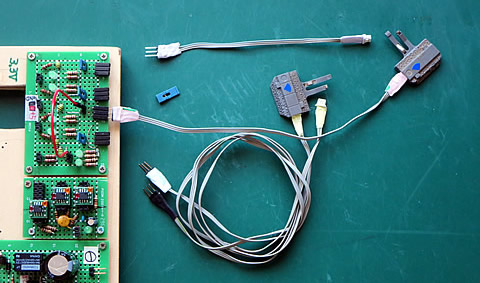
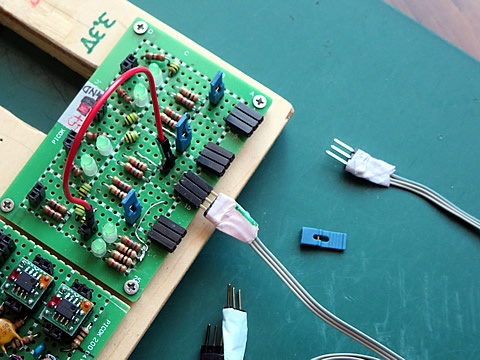
ユニットの入力端子に接続できる専用線として、センサ線の片方の端子を切断し、3本のピンを持つピンヘッダをハンダ付けしています。 長いセンサ線の場合は、下右の写真に示すようにワンタッチセンサを中継機器として使用しています。
増設した信号回路を使用する場合には、下のようにジャンパー線使って接続します。
 .
.
■ その他の回路
この他の処理回路は、ブレッドボードの空いている場所を使って配線しています。
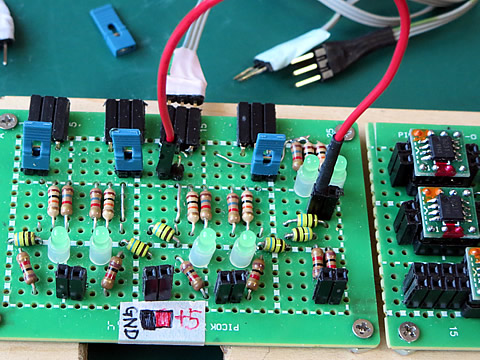
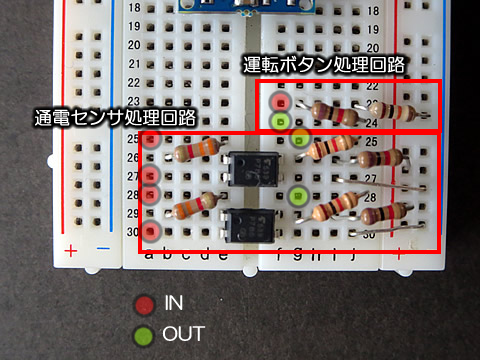
右の写真は、通電センサの処理回路と運行開始を指示する運転ボタンの処理回路を構成した場合の例です。
運転ボタンはプルダウン回路を構成し、ONの場合はHIGH となる正論理です。 また、通電センサはフォトカプラの使用例に倣ってプルアップ回路の負論理で、一方向しか検出しませんので、ケースバイケースで構成する必要があります。
速度調整と減速度設定用の可変ボリュームは、中間取り出し端子をマイコンのアナログ端子に直接接続しています。
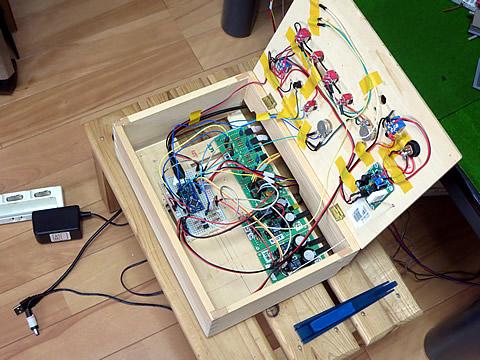
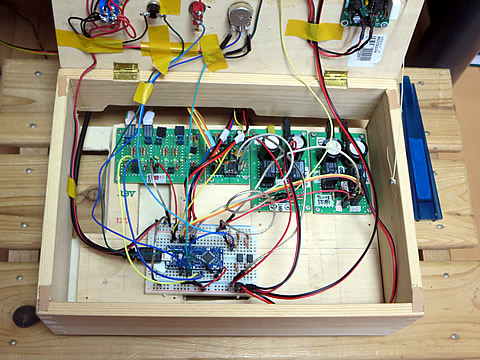
こうして新しく配線し直した例を下に示します。 相変わらずゴチャゴチャしていますが、少しはスッキリしたつもりです。
2020/3/25 作成