
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう その33
卓上レイアウトで楽しもう 自動運転 その33
先回のレイアウト「卓上レイアウトで楽しもう その32」(2021/3/5)のレイアウトを変形させ、ホームでの追い越しが出来るようにして走らせることにした。
■ レイアウトパターン19
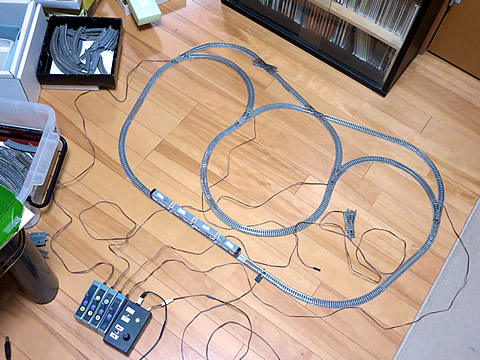
ミニカーブとミニポインンを多用するので、Bトレ車両が問題無く走行出来るのか床の上でレイアウトを組んで走らせてみた。 下左の写真。 やはりポイントの対向走行時に脱線が多発することが分かったので、このレイアウトは不可と判断した。
問題はクロス部分である。 線路を対称形にすることにこだわっていると、15°の曲線が必要となって形がどうしてもいびつになってします。 また、ポイントを分岐方向に進入する対向走行の場合には、70mm の直線走行部分を設定して断線対策とすることにした結果を下右の写真に示す。 クロス部分での対称形をあきらめている。
■ 配線の簡素化
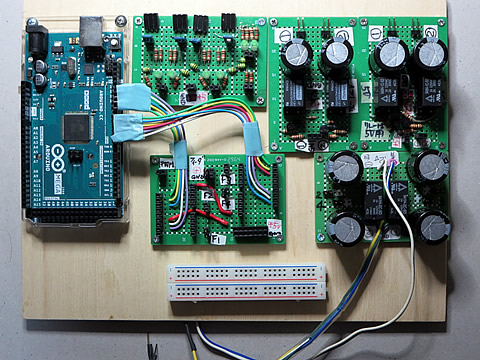
Arduino MEGA を使用するようになってから、制御箱の中の配線が、ゴチャゴチャになってしまっていた。 問題のひとつが、モータドライバへの配線である。 そこで、この部分の配線をスッキリさせるべく、専用にユニットを作って、配線をひとまとめにすことにした。 その工作を下に示す。
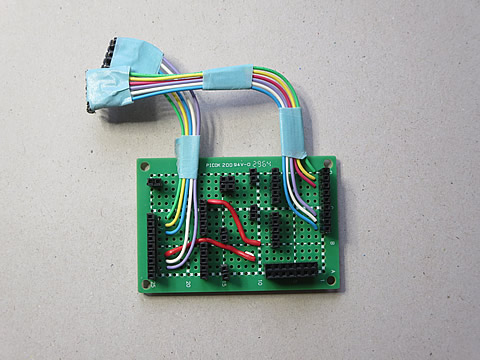
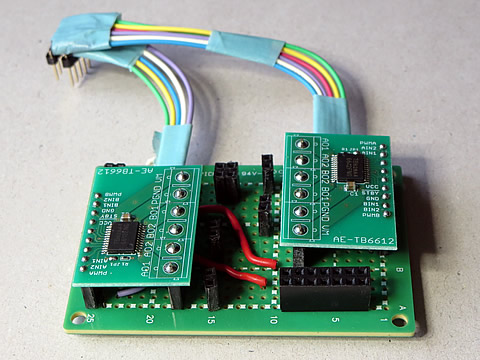
モータドライバは、秋月で見つけた「TB6612使用 Dual DCモータードライブキット」である。 キットには出力側端子としてターミナルブロックが設定されていたが、ブレッドボードでも使えるようにとピンヘッダをハンダ付けしていた。 そこで、ドライバが故障した場合でも、取り換えが容易に出来るようにと、ユニバーサル基板にピンソケットを使って差し込むようにしたのである。
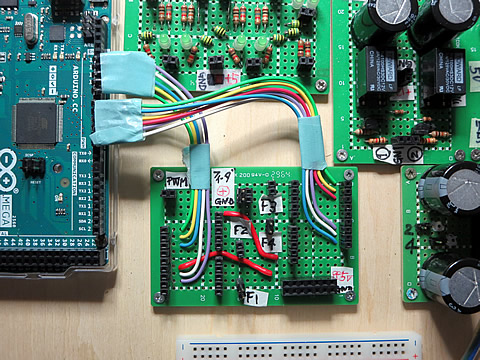
でも下右の写真をよく見ると右側のユニットが少し傾いている事に気が付くと思います。 これは、入力側端子用としてキットに使われていたのが細型で小型のピンヘッドだったのです。 出力側と高さが異なってしまったのです。 幸いもう一セットのキットが残っていましたので、通常のピンヘッドを使用したのが、左側のユニットです。
また、追加予定のモータドライバのために、給電用電源とPWM出力端子も設けています。 MEGA の場合、PWM制御は3種類の出力しか取り出せないので、この端子を利用するようにしました。 また 基板の右下にあるダブルのソケットは、DC5volt電源の多連用ソケットで、ここから共通使用するように考えて取り付けたのですが、考えが甘かったのです。 これだけの数では足りませんでした。
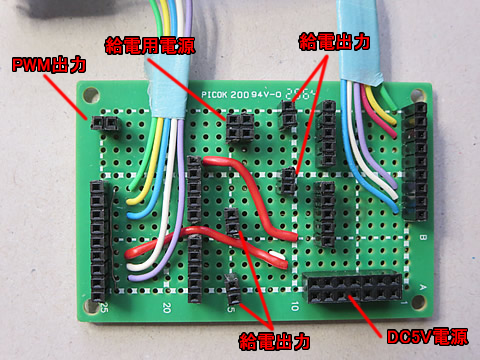
なお、配線は MEGA の指定位置に容易にセット出来るようにL型のピンヘッドを使って配線していますが、コードをきれいにまとめる事に気を使いすぎて、重大なミスを犯している事に、この時は気が付きませんでした。 どこが間違っているか分かりますか?
********************************************************************************
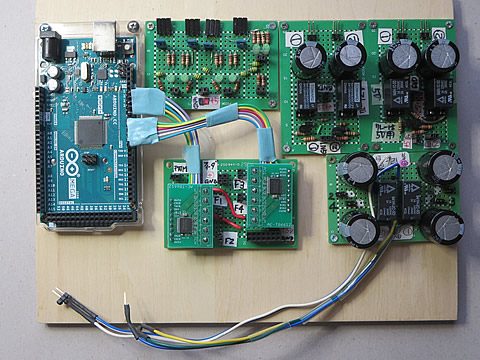
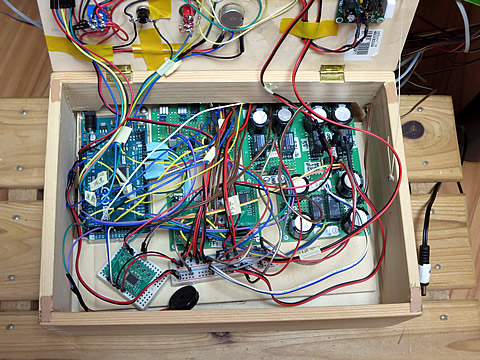
制御箱の底板に取り付けた状態を下左に示します。 MEGAとの配線がスッキリとしました。 他のユニットとの配線を実施した状態を下右に示します。
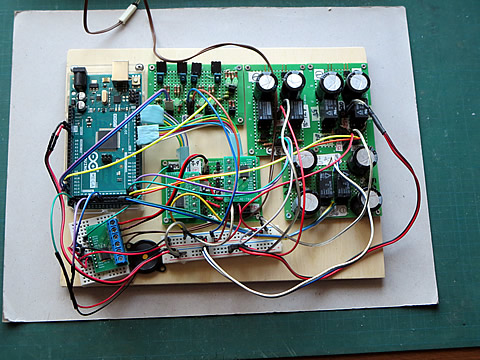
ループ部の給電のために、第5の給電ポイントが必要でした。 このため、モータドライバをひとつ追加しています。 その電源とPWM線は新しく作ったユニットと接続させています。 また、DC5V線の差込み口が足らないことに気付き、ブレッドボードの側面部を2個しようして、DC12V線とDC5V線の共有ソケットとしています。 下左の写真。
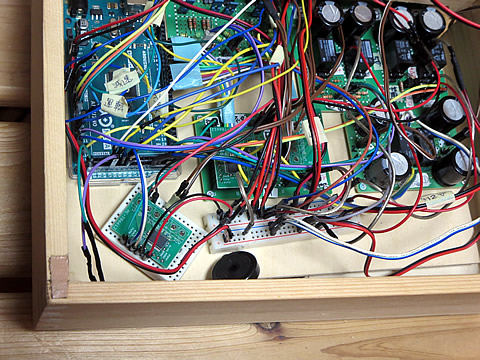
制御箱に収めてパネル側機器との配線を実施したのが、右の状態です。 配線が少しは整理できたようです。 この後、レイアウトのセンサや給電とポイントへの配線を実施したのですが、トラブル続出でした。
■ テスト走行の実施
回路構成やスケッチの内容は次回の報告として、取り合えずテスト走行の結果を報告します。 構成をかなり変更したので、今回もいろいろなトラブルに遭遇しました。 その内容を順不同で記録しておきます。
1) MEGA用の12V電源の逆接続
最初に気が付いた間違いであり、危うく高価な Aeduino をパーにするところであった。 テスト走行のためのスケッチを書き込もうとした時、シリアルポートを認識出来なかった。 理由が不明であったので、Arduino に接続しているいろいろな配線を外して行った。 そして、DC12volt の供給電源の配線を外すと、 ポートを認識出来るようになった。 今までは接続した状態でも認識していたのでその理由が分からなかった。
でも、しげしげ見ていて気が付きました。 ブレッドボードを使用した電源供給センターでの接続部において、プラスとGND側の接続が逆だったのです。 12V系と5V系の電源線はGND側を接続していますので、どこかの線を経由して逆接続の影響を Arduino に及ぼしていたと判断しました。 幸いに、DC12volt 電源のスイッチも入れていなかったので、助かったと思っていますが、もし、スイッチを入れいたならば、おそらく高価な Aeduino MEGA は昇天していたと思います。 危ない、危ない!
2) ホームからの発車が出来なかった。
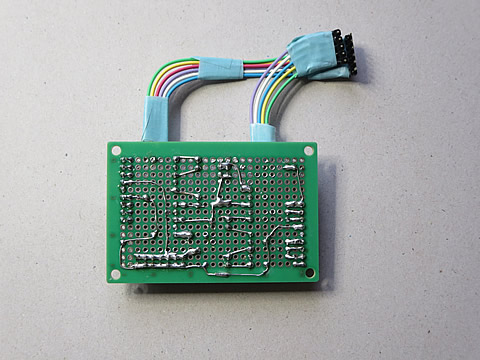
ホーム区間用のモータドライバの配線が間違えていたからである。 MEGAのD6ポートから出力するPWM信号の接続先が間違えており、このためD2〜D6までのポート接続先がズレていたのです。 何故動かないのか不思議だったのですが、モータドライバユニットをぼんやり見ていて、ハタと気が付いた次第です。 配線類をすべて外して、ユニットを取り出してどうやって修正しようかと考えていたのですが、L字型ピンヘッドの位置を差し替えるだけで対応できることが分かりホットしました。 修正後の様子を下に示します。 空色のクロスしている線が修正した部分です。
3) 第3のモータドライバが作動不良であった。
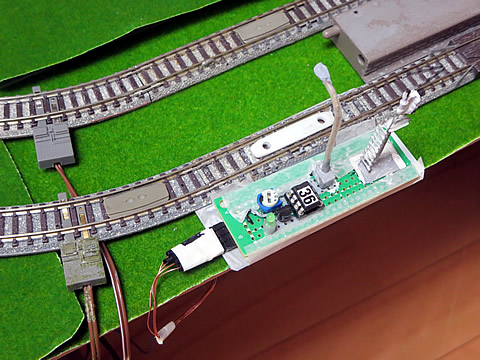
ループ線の中央に給電するモータドライバが作動不良であった。 このためモータドライバを取り換えた。 ストック品があったので助かりました。 新しい配線状態を下に示します。
4) ワンタッチセンサの作動不良
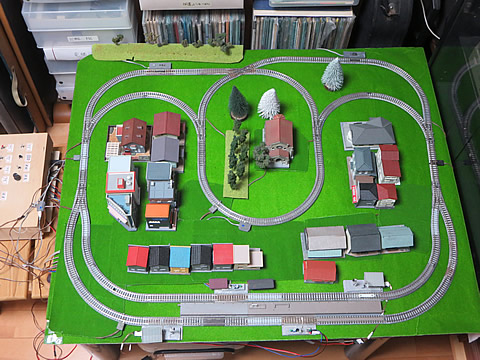
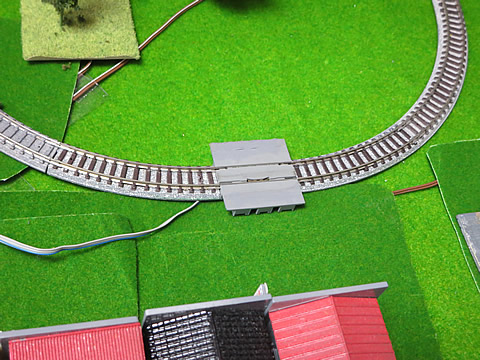
ループ線の中央に設置したワンタッチセンサが左方向走行時は出力するも、右方向走行時はダンマリであった。 ここは曲線部なのでワンタッチセンサしか対応できず、新しく光センサを作るはめになったかとあきらめていた時、路面電車用のセンサがある事に気が付きました。 そして、下の写真のようにこの部分に設置した。 作動は確実であり一安心であった。
このレールは37mm であり、他の部分は33mm の端数レールを挿入して対応した。 何故か寸法が合わないが、少しの変形は許容されています。 しかし、レイアウト全体が横手方向伸びてしまい、横幅ギリギリの状態となった。

5) 2番ホームの信号機が作動不良となる。
2番線の出発信号機が正常に作動しなくなっていた。 半固定抵抗の上面が取れていたので、新しい部品と取り換えるも復帰しなかった。 さらに、コンピュータ側の問題と疑って、1番ホームと2番ホームの信号機を取り換えてチェックしたが、改善できなかった。 あきらめていた時に、線路上面の白いカバーがズレている事に気が付き、上からの光を遮断していたのが原因であることが判明した。 位置を正常位置に移動させると、正常に作動するようになった。 接着が不十分であったようである。

なんとかトラブルに対応できたのですが、もう単純ミスが多く、ボケボケの状態ですね。 でも、じっくりと状況を観察するとミスているところが見えてきます。 何時も愛着を持って(?)工作していますので、相手の方から、ここが間違っていますよ! と言ってくれているのかな? そんなことはないか。
■ テスト走行の結果
スケッチの記述の間違いの修正や、作動が不安定だったポイントの交換などを実施して、予定していた運行を実施出来るようになりました。 苦労した分、嬉しいですね。 その様子を動画で紹介しましょう。

ここでは、追越しパターンをまだ撮影していませんが、Bトレと言えども室内灯が装着すると雰囲気が出ますね。 すると、街の灯りも欲しくなってしまいますが、卓上レイアウトでは無理の様です・・・・・・・・・・・・・。 残念!
また、ミニカーブやミニレールを使った自動運転では、やはり脱線事故などが避けられないようです。 Bトレとの相性も良くないようですので、鉄コレシリーズを適用させようかとも思っています。 さて、どうなるだろうか。
2021/3/14 作成