
HOME >> 鉄道模型自動運転システム > 電気回路の検討
登山鉄道自動運転システム 電気回路の検討
■ はじめに
今回はシステムを制御するための電気回路を検討する。 このシステムは、色々な要素を組み合わせて構成するが、それぞれの構成要素は今までの実施例や雑誌などを参考にして設定していく事にする。 そこで、それぞれの構成要素ごとに検討して行こう。
メインの制御コンピュータとして、I/Oポートの数が多い事と、現在勉強中であることより RaspberryPi 3 を想定している。 なにしろ電気回路についてはまだまだ未熟者であるために、実際に作って見なければ作動するかどうかは分かりません。 このために、参考にされる方は最終的に成功しているかどうかを見極めてから参考にしてください。 失敗していたら失敗例として参考にして頂ければ幸いです。
 .
.
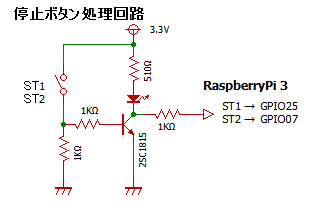
■ 一時停止と終了ボタンの処理回路
まず最初に、一時停止と終了ボタンの処理回路を検討する。 このボタンは運転の一時停止と運転終了のためのボタンを設ける。 一時停止ボタンは、脱線等のトラブルが発生した時に一時的に全電車を停止させ、再開時にはそこから走行を開始させる。 運転終了ボタンは、スタート位置まで自動的に戻って来て運転をすべて終了させる。 スタートボタンも兼ねるつもりでいる。
一時停止ボタンは保持機能付きの押しボタンスイッチを想定しているし、運転終了ボタンはON/OFF切り替えスイッチを考えている。 プログラム処理ががうまく出来るかどうかは自信がないが、とにかく操作者の意思をコンピュータに伝える手段を設けておく。
回路はプルアップ構成とし、スイッチが作動状態の場合にそれを表示するためにLEDを点灯させることにする。 このため、トランジスタによるLED駆動回路とし、入力ポート保護のために1KΩの抵抗を挿入している。 また、この回路は正論理の回路構成となった。
 .
.
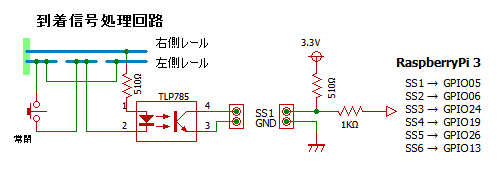
■ 到着信号処理回路
電車がホームに到着して、エンドレールの停止ブロックを操作させた場合、制御コンピュータに信号を伝える回路を構成する。 レールエンド部の構成は先回の報告で紹介しているが、その信号をコンピュータに取り込む部分である。
回路はプルアップ構成とし、入力ポート保護のために1KΩの抵抗を挿入している。 使用するフォトカプラは東芝製のTLP785を選定し、その仕様書を見ていたが、発光側と受光側の抵抗の選定方法がよくわからない。 発光側は、12VのPWM制御された電源であるので、推奨電流25mA以下になるように選定した。
受光側は、3.3V電源と想定しているので、推奨電流1mA、最大で10mA、絶対定格で50mAとあり、1kΩでも良さそうであるが、少し多めの510Ωとした。 また、発光側がPWM制御された電源であるので、パルス状の信号となって入力されないのか心配な点があり、コンデンサを必要とするかどうかも実験で検討しておこう。 この回路は負論理の回路構成となっている。 このため、正常に通電されておればLOW信号が入力されるが、電車が到着した場合は勿論、断線している場合や通電不良の場合にはHIGH信号となるので、状況確認が可能と考えている。
 .
.
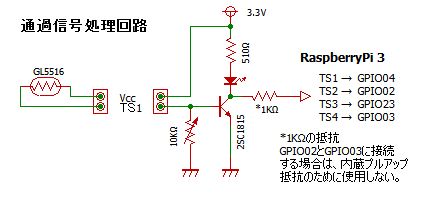
■ 通過信号処理回路
この要素は、電車がホームなどの終点に近づいた場合に減速運転させるために設けたセンサーである。 センサーとしては色々な種類があるが、今まで使用してきた CdS センサーを使用した。
本来なら簡単な回路で充分であるが、少し欲張って検知する明るさを調整できるようにしてみた。 実際に電車を動かして調整すれば良いが、この自動運転の場合にはめんどうである。 そこで、LEDの点灯具合によって調整できるようにした。 電車が通過するとセンサーの上が暗くなりCdSの抵抗が大きくなる。 するとトランジスタがOFFになり、LEDを流れる電流流が切れる。 ただし、信号はHIGHとなる。 センサーを丁度切れくかどうかの状態になるようにボリュームを調整しておけばよく、センサーが正常に作動している状態ではLEDが点灯するので、回路の作動状態も確認できるのだ。
今回、ラズパイのI/Oポートがギリギリだったので、I2C通信用の専用ポートであるGPIOの2と3を使用している。 このポートの場合には1.8KΩのプルアップ抵抗が内蔵されているとのことであるので、入力ポート保護のために1KΩの抵抗を挿入していると、ON/OFF判定の不安定領域に入ってしまうので、1KΩの抵抗は使用できないである。
 .
.
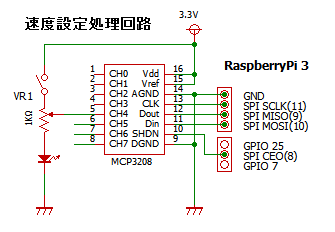
■ 速度設定処理回路
こんどのシステムは最大で4台の電車を自動運転しようと目論んでいるが、各電車の速度特性はバラバラであるものと想定している。 このため、各電車に合わせて速度を調整して運転できる方法を模索することにしたが、まずは、その設定が出来るハード部分を作っておくことにした。
ボリュームによって設定電圧を変化させ、それをA/D変換してラズパイに取り込むものとしたが、ラズパイの勉強で取得したA/D変換とSPI通信を活用することにした。 4台の電車毎のアナログ値を12ビットADコンバータである MCP3208-CI/P を使い、ラズパイのSPI通信ポートに送信するようにした。
また、常に4台の電車を動かすとは限らないので、何台動かそうとしているのかの意思をコンピュータに伝える必要があると考えた。 そこで、この速度設定回路を使って工夫してみた。 即ち、ボリュームをスイッチ付にして、そのON/OFF にて使用状態の意思表示するものとし、スイッチがOFFの場合は確実に判断してもらうためにボリュームの抵抗に下駄を履かせることにした。 ボリュームを最小位置にしたとしても、下駄分の電圧が現れるはずである。 そして、単なる下駄では無くて、電車の設定を実施したとの表示のためにLEDを光らせることにした。
 .
.
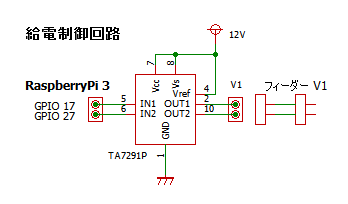
■ 給電制御回路
走行する電車の速度を調整する回路である。 この給電回路は豪勢にもPWM制御方式とした。 モータドライバICは東芝製のTA7291Pを使用する。 ネットや雑誌等で多くの実施例が紹介されているので説明を省略する。 電源はTOMIXのパワーユニットと同じ 12V を使用する。 これはACアダプターから供給する。
PWM制御の精度はDCモータの制御のためなので、疑似的なアナログ信号として使用するため、精度のはあまり要求されない。 このため、任意のGPIOポートが使用できる。 そこで、GPIOの17、27、22、14、15、18の6個のポートを使用する。
 .
.
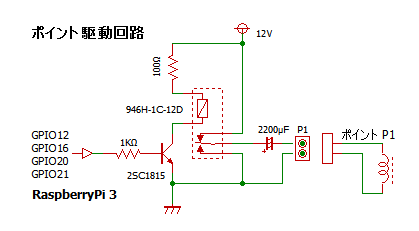
■ ポイント駆動回路
ポイントを駆動する回路も多くの参考資料が紹介されている。 今回は、電子工作マガジンのvol.30 に紹介されている回路を使用する。 部品は何時も利用している秋月さんから取り寄せることにしたが、該当するリレー(TOWARD製 N4100HS312V )が無かったので、同等品と思われるシンダ製高感度小型パワーリレー 946H-1C-12D を取り寄せた。
電源は、これも12Vとし、2200μFのコンデンサ使用する。 8字測定台の駆動回路を参考にしている。 また、マガジンの説明回路には100Ωの抵抗がコイル回路に挿入されているが、この役割は何なのか説明がないので、理解できていない。 リレーの仕様書によるとコイルの抵抗は720Ωなので、12V でも17mAであり、通電状態が続いたとしても安全圏であろうと判断している。
他の資料によると、コイルの電流を切断した時に発生するフリーホイール電流によって、駆動回路が破壊する恐れがあるので、フリーホイール・ダイオードをコイルの両側に接続しておきなさいとあるので、少し心配になって来た。 100Ωの抵抗がこの代役なのかと、もう一度電子工作マガジンvol.30 の31ページ、図6と図7のイラストを観察すると、 100Ω抵抗の接続位置が異なっているのである。
100Ωの抵抗が、図6ではコイル回路に、図7では接点回路側に接続されている!
電波新聞社が発行する雑誌なので権威ある出版社でもミスることがあるようですね。 どちらの場合でも有りの気がするが、未熟者には判断出来ない。 このため、まずは図6の回路図の接続位置で実施してみよう。
■ 全体回路の構想
システム全体の回路構成案を下に示す。 ⇒ 拡大図 PNG形式の原図
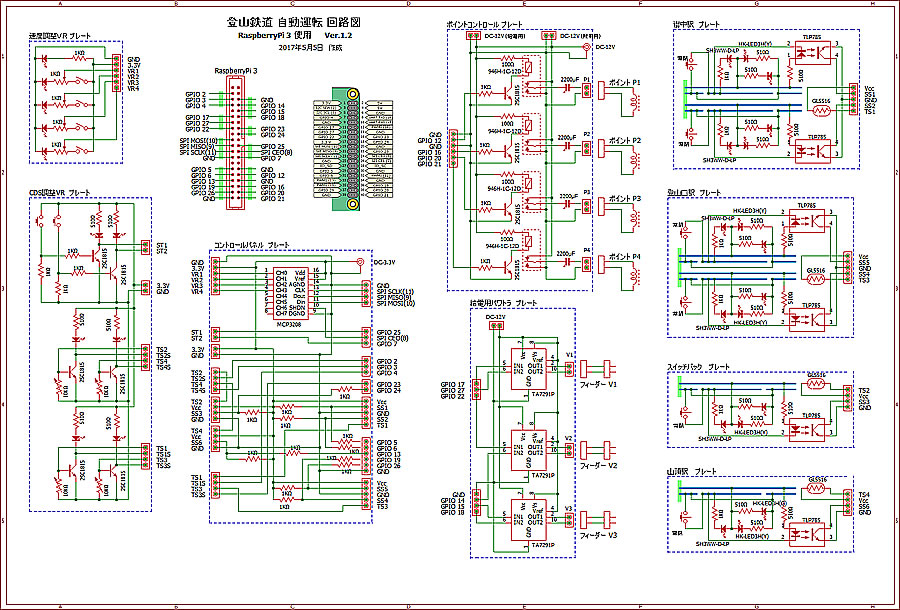
電源は、12ボルトは当然別電源であるが、3.3ボルト系についてラズパイの電流容量が不明なため、あえて別電源とすることにした。 別電源ならば5Vでも良いが、信号レベルを合せるために、3.3Vとしている。 もし、ラズパイでうまく行かなかった場合には、Arduino に変更する場合も想定して、対応できることを多少は考えている。
コントロール・ボックスも制作するつもりであり、各回路の修正・訂正などを考慮して、各要素毎に基板を分離独立させている。 そしてスイッチやボリュームは表面パネルに設置するので、その裏に基板等を使って回路を構成する。 各基板間は何本かをまとめたコネクタ付きの配線で接続させる。 ラズパイとの接続も同様である。 GPIOの設定は、こうした事情を配慮して、まとまって接続できるように設定したつもりである。 コネクタは、ピンヘッダとピンソケットを使用し、電源の上流側にはピンソケットを使ってショートの危険性を少しでも減らす様に配慮しよう。
■ 今後の予定
全体の姿が見えてきたので、今後はそれぞれの回路が本当に機能するのか、またそれを動かすプログラムが作れるのかを検証しながら進めるkとにする。 まずはブレッドボードに回路を構成して、ラズパイを動かしながら確認していく予定である。
また、心配しているのは、ラズパイを自動起動させる方法である。 今回のシステムでは、モニタやマウス、キーボードと言った周辺機器を接続しないで使用するつもりなのだ。 Arduino の場合は電源をONするとプログラムは自動的に RUN を始めてくれるし、終了する場合も電源をプチと切ってしまえば良いのである。 しかし、ラズパイは、自動的に起動するのはOSであって、指定のプログラムでは無い。
さらにプログラムを停止する方法場合はどうやって指示するのか? 電源をプチと切れば良いのだろうか。 ラズパイは小さい言えどもれっきとしたOSが走るパソコンである。 パソコンでは終了のために電源をプチと切る方法は厳禁されている筈だ。 きちんとして終了処理が必要なはずである。
マウスやキーボードを使用せずに、この自動起動とシャットダウンの操作を行う方法については、ラズパイの参考書の中のキャタピラ式模型の操作として詳細に説明してある。 しかし、ここは読み飛ばした部分なので、改めて勉強しておく必要があるのだ。 ここに来てその必要性を認識した次第である。
2017/5/11 作成 M.T.