
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その7の2
卓上レイアウトで楽しもう 自動運転 その7の2
自動運転 その7の1のレイアウトに於いて、どの様な走行パターンが考えられるのか検討してみました。
■ 走行パターンの検討
右回りと左回りについて、周回パターン、リバースパターン、8の字パターンの走行に於いて、ポイントの制御方法とセンサの位置を検討し、表にまとめてみました。
| 種類 | 走行パターン | 設定状態 | |
|---|---|---|---|
| 基本配置 | 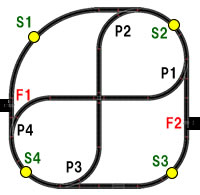 |
フィーダー: F1、F2 ポイント: P1、P2、P3、P4 センサ: S1、S2、S3、S4 |
|
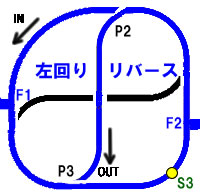
| 周回パターン | 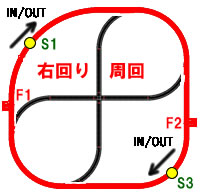 |
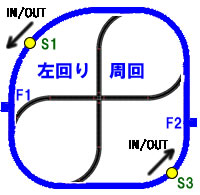 |
ポイントは全て定位に設定する。 周回の開始と終了はどのコーナーでも良いが。 |
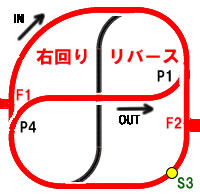
| リバースパターン | 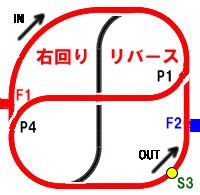 |
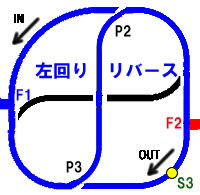 |
中部のクロス路からリバースに入るパターン。 INから開始して、中央部のクロスを通って、OUTにて終了する。 ポイントは、PI とP4、あるいは、P3 とP2 を反位に設定する。 フィーダはF1のみで可能であるが、F2を通電させる時は逆となる。 |
 |
 |
外周路からリバースに入るパターン。 F1とF2をONにしてINからスタートし、外周部にてセンサS3を検知後、F1をOFFし、その後P1 あるいはP3 を反位に切替てから、F1を逆方向にONし、中央部のクロスとOUTを通って、INに戻る。 |
|
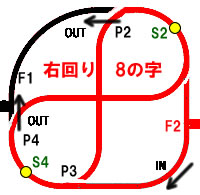
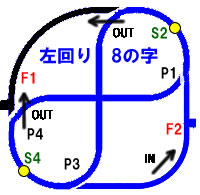
| 8の字パターン | 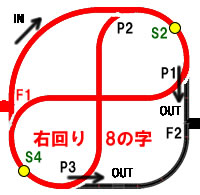 |
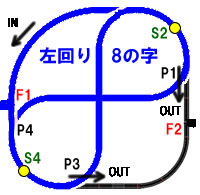 |
フィーダはF1のみ設定する。 IN から旋回路に入るポイントのみ、定位として給電通路を確保し、他のポイントは反位とする。定位のポイントはスプリングポイントとして機能する必要がある。 OUTのためには、S2またはS4を検知後に、P1あるいはP3のポイントを定位に戻す。 OUT後、F2の通t電にはその極性に注意すること。
|
 |
 |
フィーダはF2のみ設定する。 IN から旋回路に入るポイントのみ、定位として給電通路を確保し、他のポイントは反位とする。定位のポイントはスプリングポイントとして機能する必要がある。 OUTのためには、S2またはS4を検知後に、P2あるいはP4のポイントを定位に戻す。 OUT後、F1の通t電にはその極性に注意すること。 |
|
この結果、センサは各コーナーに一つずつ必要となるも、ギャップの設置は不要であることが分かりました。 完全選択式のポイントを使用するため、ポイントの切り替えで対応できるため、ギャップは不要となります。 しかし、フィーダーは2ヶ所必要で、独立して制御する必要があり、ポイントもスプリングポイントとして機能する必要があります。
また、走行させる電車あるいは列車は、一編成だけですが、バック走行はありませんので機関車を使った編成を走行させる事ができます。 各パターンをうまく組み合わせれば連続走行させることができますので、その組み合わせの例を作って走行させることにします。
■ 運行パターンの作例
取りあえず、幾つかのパターンを組み合わせて運行パターンを作って見ましょう。 準備として、ハードの整備が必要です。 使用するポイントが4個になりましたので、ポイント駆動回路を増設する必要があります。 また、センサについても、曲線部に設置する必要がありますので、ワンタッチセンサを使う事となります。 このため、確実な作動を確保するために、整備する必要があります。
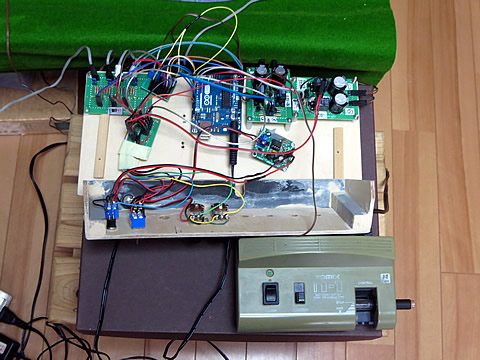
これらの工作と整備作業については、次回の報告として、まず、テストした運行パターンを紹介します。 今回の卓上レイアウトは下の様にせっていしました。


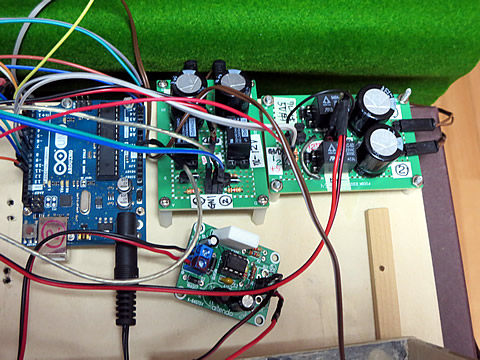
コントロール部は、ユニットを増設したために、ゴチャゴチャとなってきました。 メインのコンピュータはArduino を使用し、給電制御は非PWM制御のパワーユニットを使用します。 ただ、発進と停止時の加速と減速にPWM制御を含めました。

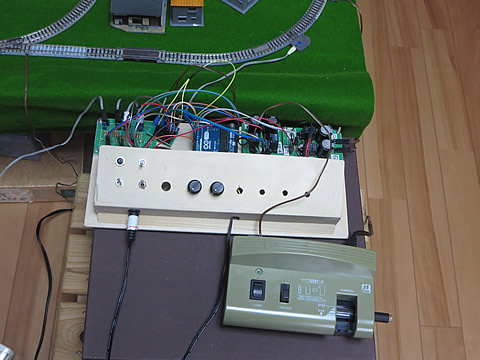
ポイント駆動回路は、ACアダプタから供給される12Volt を使用し、ここから5voltの定電圧を供給し、Arduinoの5volt電源やコントローラの12Volt 電源は使用していません。 これは、PICマイコンの使用そ想定しているからです。 色々な独立したユニットが増えてきましたので、各ユニットの電位差に違いが無いように配慮し、GND配線には注意しました。 なるべく一ヶ所の基板にGND配線を集中するようにしています。
カーブ線路に取り付けたワンタッチセンサの様子を下に示す。 青いシールは整備完了品の目印です。


線路がクロスする中心部には、トラム用の線路を使用しボードを使って道路としましたが、地面作りが目的ではないので、手抜き状態です。


運行に使用した電車は、安定した走りをしている登山電車車両を使いました。

いくつかのトラブルがありましたが、無事に運行できようになりました。 組合せを変えたり2列車での運行などの検討も面白そうですね。 次回は、ハードとソフトについて報告することにします。
2019/12/2 作成