
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう その31
卓上レイアウトで楽しもう 自動運転 その31
先々回報告した「卓上レイアウトで楽しもう その30」(2021/1/23)で、I/Oポートの不足を問題にした。 その解決策として、Arduino MEGA を使用する方法について、「Arduino MEGA を使ってみる」(2021/1/30)にて調査を実施した。 そして問題なく使用出来る事が確認出来たので、早速レイアウトの自動運転に活用したので報告する。
■ レイアウト構成
レイアウト構成は先回の状態から一部を修正した。 まず、周回路のワンタッチセンサの作動が少し不安定であったので、信頼性の高いレールセンサに変更した。 このため、横方向のレイアウトサイズが、70mm×2 = 140mm と伸びてしまったのでホーム等のレイアウトも修正した。 そして、曲線部に設ける予定であったホームの出発信号機をその増加した直線部に取り付けることにした。 下の写真にその様子を示す。

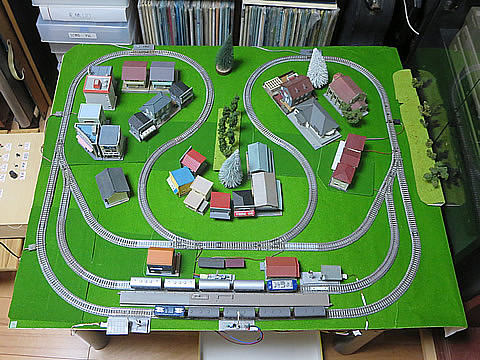


でも、最大の問題は、この延長によってレイアウトがこたつ用天板からはみ出してしまうのである。 そこで、苦肉の策として丁度ストック品としてしまっていたピッタリサイズのベニヤ板を下に敷いて、スペースを拡大させた。 720×915mm である。

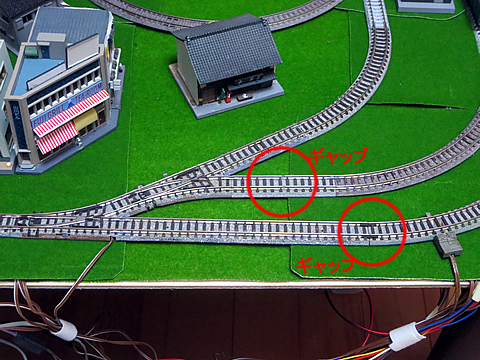
駅構内での加速や減速制御を実施するために独立した閉塞区間とする。 このために、駅構内の左右の出入り口部にギャップを設けた。 ギャップレールとギャップジョイナーを使用する。 下左の写真。 周回路の中央部は周回路でのリバース線を構成するために、中央部にもギャップを設けている。

■ 回路構成
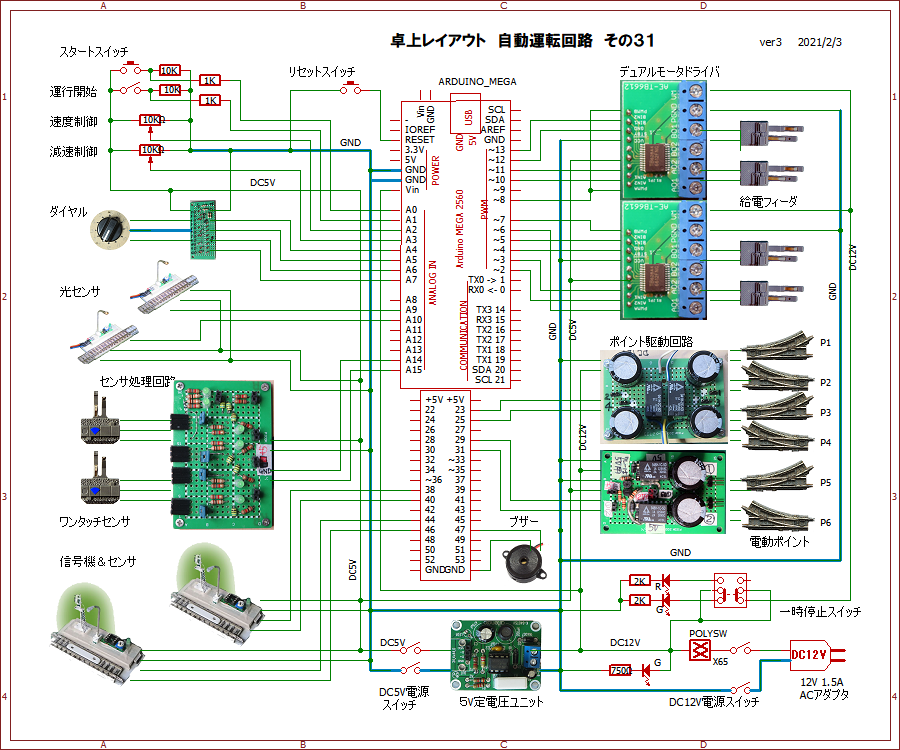
制御用コンピュータは Arduino MEGA を新しく使用するので、その回路構成を検討した。
 .
.
給電のための制御は、先回確認した回路をそのまま踏襲する。 即ち、タイマー4につながるデジタル出力ポート D8、D7、D6ポートをPWM出力ポートとして使用し、デューティ比を個別に制御出来るようにする。
また、タイマー4のプリスケーラを変更してPWM信号のキャリヤ周波数を 31KHz に設定し人の可聴域外にする。 これは、たった一行のおまじないで設定可能である。 さらに、上記のポートのPWM信号のタイミングもピタリと一致するので、ギャップ時を跨いで通過する場合には良好となるはずである。
モータドライバの出力制御(回転方向制御、即ち、電車の進行方向制御)は、それぞれ二つのポートのON/OFF指定で実施する。
左右に分割している周回路の閉塞区間については、速度制御は同一で実施するも、リバース時には進行方向が逆になるので、個別の出力制御が必要となる。 このため、ポートD8のPWM信号 F12PWM は同一で使用し、方向制御はF11、F12、F21、F22 とフィーダF1とF2の制御を実施する。 P3PWMは1番ホーム用、P4PWMは2番ホーム用である。
出力制御は、回路図とレイアウト状態を見ながら、どちらをONさせればどちら方向に走るのかを検討する必要があるのでだが、面倒なので、テスト走行で調整する事にしている。もし反対方向になっている場合は、給電コネクタの接続を差し替えれば良いだけなのだ。
ただしスケッチ記述時は混乱しないように、” 1 ”は右回り方向で、” 2 ”は左回り方向と決めて、各閉塞区間の走行方向を統一させて記述している。
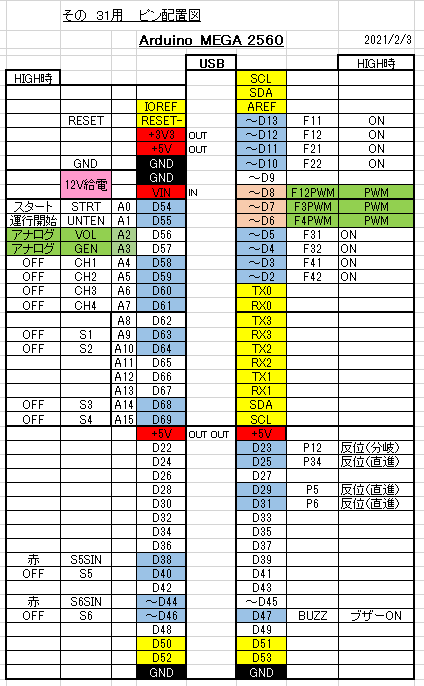
MEGAのポートの配線状態を上の配線図と共に、右のようなリストを作成している。 これはI/Oポートに対応してポート名を付与しておくためである。
さらに、ポートがHIGH の状態は、どの様な状態を示すのかも記入しておく。 例えば通過センサの場合は、回路が負論理構成なので待機状態、即ちOFFの状態を示しているし、運行開始とスタートスイッチは正論理構成なので、スイッチがON状態を示しています。
そして、ポイント駆動回路では反位状態になる事を示している。 さらに、反位はポイントが直進位置なのか分岐位置なのかも明記しておくと、混乱防止にもなります。
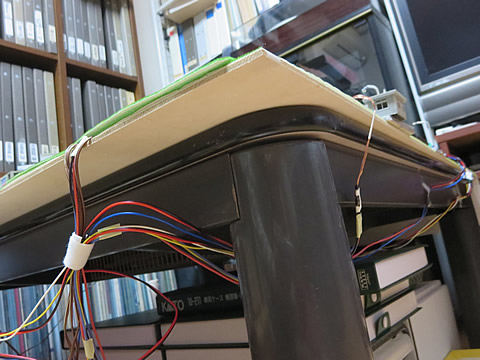
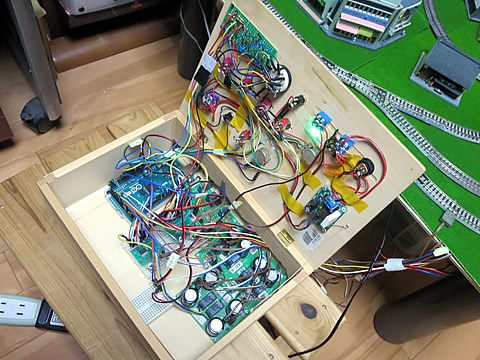
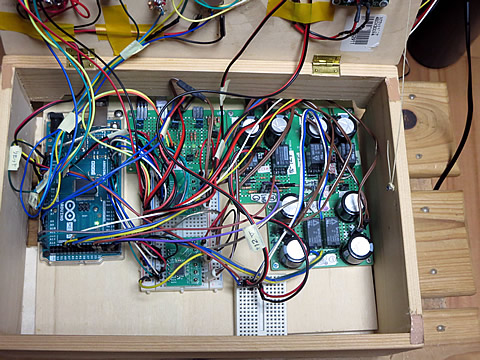
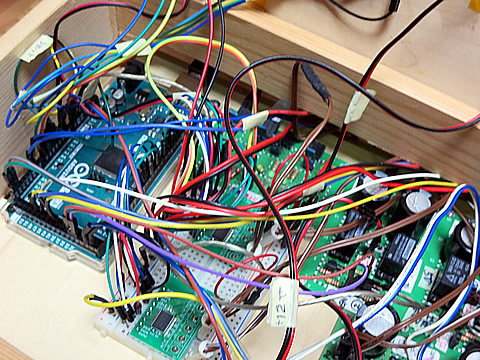
さすがにI/Oポートが多数あるMEGAですからスキスキの状態です。 でも実際に配線してみると、下の写真のようにゴチャゴチャの状態になってしまいました。 まさに鳥の巣の様です。
今回の配線にあたって、制御箱の底の敷板をMEGAが収まるように新設しました。 小さなブレッドボードは DC12vol 系の配線の中継用です。
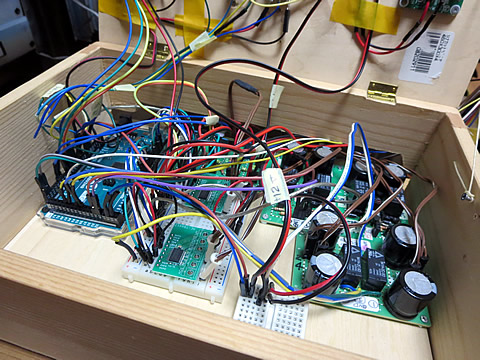
今後もこのMEGA用の配線を使用するようであると、モータドライバ部分をシールドとして作成して、配線をスッキリとさせるの良いかもしれません。
■ スケッチの記述
電気回路も構成出来たのでスケッチを記述した。 全体構成は先回と同じですが、モータドライバの記述方法を変更する必要があります。 また、駅構内の走行を独立して制御出来るようになたったので、給電フィーダーF3とF4を新設し、入れ替え時の発車加速と減速停止の制御を追加します。
モータドライバの出力ポートをON/OFFする場合、PWM指定より先に指示してしまうと、一周とはいえ電車が暴走する恐れがありますので、まずPWMのデューティ比を指示した後でポートをONを記述するようにしました。 また、進行方向を変更する場合、両側の線路が同時にHIGH (モータがブレーキ状態になる) にならないように、HIGH側をLOWに落とした後に、LOW側をHIGHにするよう、無駄とは思いながらも気配りする事にしています。
これらの変更は結構手間が掛かってしまい、幾度もミスを繰り返しながら記述を修正して行きました。 どこで出力ポートをHIGHにしたのかLOWにしたのか分からなくなってきたので、スケッチをプリントアウトして、紙の上でその状態をメモして行きながらチェックして行きました。 ふーーー!
ハード回路の配線ミスも重なり、半日かけてやっとのことで正常に動くようになりました。 根気がいりますね。
スケッチの詳細 ⇒ MEGA-2-7.html
■ テスト走行の実施
スケッチを書込み、まず最初にポイントの作動状態をチャックした。 配線ミスやポイントの定位状態を修正してポイントの作動を確認した。 次に、ダイヤルを1や2に合わせて走行テストを実施するも、ダンマリであった。 給電フィーダーの接触不良、方向の確認を実施するもやはり駄目であった。 なんのことは無い、PWM制御の新しい書き方をミスっていたのである。 まず、デューティ比と出力ポートを別々に指示する記述がひつようだったのである。 相変わらずトロイですなぁ・・・・・・・・と溜息である!
これに合わせて、スケッチを修正してきてバージョウンは7にもなってしまったのである。




スケッチは順調に作動するようになったのだが、今度はBトレ車両が脱線やカプラーの自然開放などのトラブルが続出した。 電車や客車など色々な組合せを試し、ミニポイントやS字カーブでも問題なく走行できる状態が上の写真の状態である。
その作動状態を動画で紹介しよう。

スロー運転を音も静かに走行している様子をみると、今までの苦労がすっとぴ癒されますね。 KATOのコアレスモータの機関車、31KHzの高周波のキャリア周波数の効果ですね。 信号機も狙いどうりに作動しており、列車の入れ替えパターンにおける列車の追い出しとホーム停車もスムースに運行されています。
2021/2/5 作成