
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その6−1
卓上レイアウトで楽しもう 自動運転 その6−1
最新のユニットを使って、今までのシステム構成を見直して行きます。 今回は、「自動運転 その6」(2019/11/24)の構成を変更しました。
■ システム構成

.
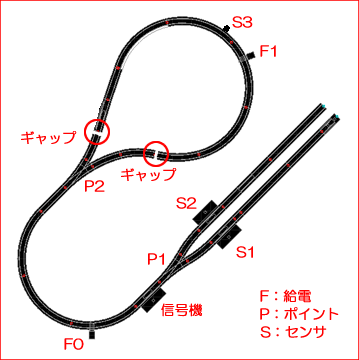
レイアウトは、上左に示すように、「自動運転 その6」 の場合と同様な構成にしています。 ポイントは曲線半径の大きいY字型ポイントを使用し、S字カーブの曲率変化をすこしでも緩和するような配慮をしています。 給電のための給電ポイントは F0 と F1 として、電車を停車させることなくリバース線を走行するように制御せいます。 また、二つの給電間の干渉を避けるために、ギャップを2ヶ所設けています。 今回は出発信号機も追加しています。
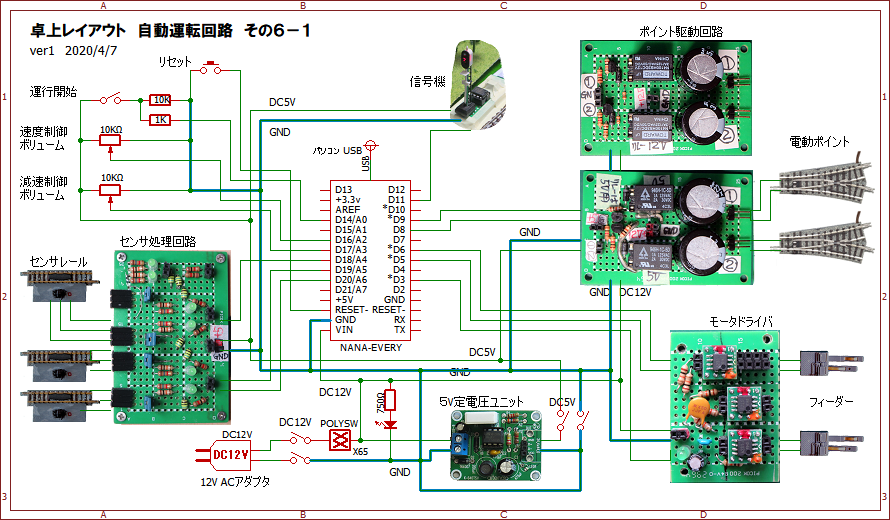
制御用コンピュータは Arduino Nano Every を使用し、周辺のユニットは見直し後の最新(?)ユニットを使用します。 Every のポートには余裕がありますので、ピンの差込みが容易なようにと間隔を開けて配置しました。 回路図を下に示します。
出力ユニットにおいて、入力側にプルダウン回路を追加していますので使用しないポートには配線を実施していません。 このために、配線が少し楽になりました。 また、減速制御用のボリュームやリセットスイッチも、先回と同様に追加しています。
また、メインの給電F0では、右回りと左回りがありますので、二つのPWMポートを使用していますが、リバース線は右回りしかありませんので、F1はひとつのPWMポートしか使用しません。
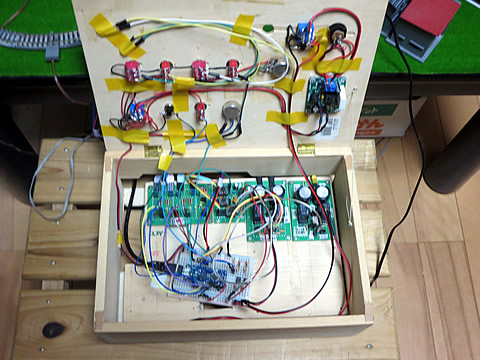
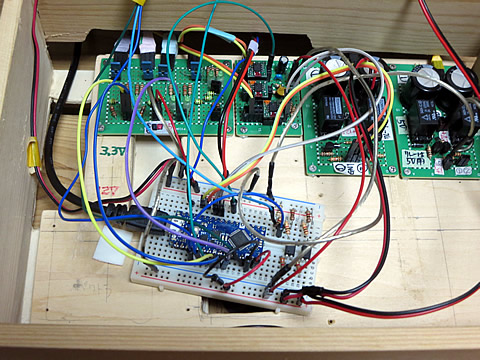
配線状態を下に示します。 Arduino を設置したブレッドボードを配線盤として使っています。 両側の電源ラインは、手前が12V系で、奥側が5V系として使用しています。
■ 制御プログラム
スケッチの記述は、今までの方法を踏襲しています。 シケンスはシンプルなので順次記述しています。
制御スケッチ: Every_RF_6-1
まず、PWMキャリア周波数を15.7KHz に設定しておきます。 そして、Arduino Nano Every に書き込むときに、メニューからCPUの周波数を20MHzに設定しておくと、約20kHz のPWM周波数が得られます。
注意点として、 PWMキャリア周波数を 1kHZ から 20kHz になるようにタイマーの周波数をいじっていますので、delay() 関数は、通常の20倍の数値として設定する必要があります。 1秒の遅延を指定する場合は、1sec = 1000 の20 倍、即ち、20000 と指定する必要があります。
作動は、ポイントの駆動チェックを実施後に、運行開始スイッチがON されるまで待機します。
- 運転スイッチがONされるまで待機。
- ポイントの設定と信号機を緑にして、1番ホームの電車が発進し加速する。
- リバース線の通過センサが検知すると、リバース線のポイントを切替え、本線の進行方向を逆転させる。
- センサ1が検知すると、即ちホームに到着すると、減速して停車する。
- ポイントを切り替えてホーム2の電車を発車させて、リバー線を回って帰ってくる。
- これを繰り返す。
このシーケンスを繰り返し実行するように記述している。 勿論、随所に速度調整用のボリュームの値を読み取り、走行中の速度をPWM 信号として出力している。
■ 運転状況
今回は、4両編成のBトレの名鉄電車を2セット用意して交互に走らせました。


走らせてみて、自分でもびっくりしました。 パノラマスーパーの先頭車両が光っているのだ。 室内灯は勿論、ヘッドライトとテールライトが! 何時工作したのか思い出せないし、このホームページにも報告が無い!
このBトレの台車はバンダイのBトレ用動力車とトレラー車を使用している。 集電可能な台車として期待して購入していたが、摩擦抵抗が大きすぎて採用を中止した経緯があるのだ。 この、名鉄シリーズにはそのまま使用していたのだ。 4両編成では走行できるが、停車位置の違いに注目すると、動力性能と摩擦抵抗のバラツキがはっきりと確認できる。
これらの様子を動画で紹介しよう。



さて、次はどのテーマを取り上げようかな?
2020/4/8 作成