
HOME >> 鉄道模型自動運転システム > 新ATSに挑戦 制御ユニットの機能チェック2
新ATSに挑戦 制御ユニットの機能チェック2
■ はじめに
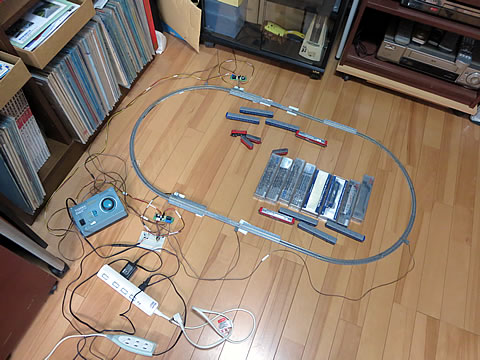
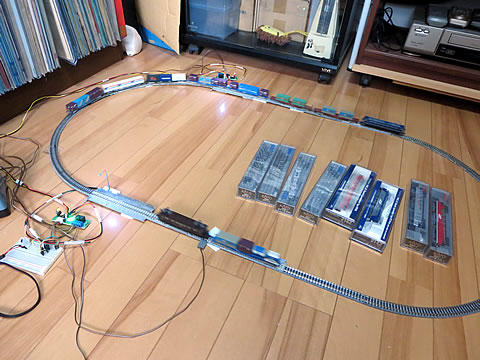
製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察した。 今回は、PWM制御方式のコントローラの使用や、フライホイール搭載の電気機関車、および室内灯を組み込んだ客車を走らせて、不具合の発生具合をみる事にします。
■ レイアウトの変更と旅客列車の運行テスト
電気機関車、客車などのNゲージの車両を走らせるために、標準半径である 280mm の半径を持った線路に取り換えた。 そしてコントローラはPWM制御方式のTOMIX製N-1000-CL を使用する。
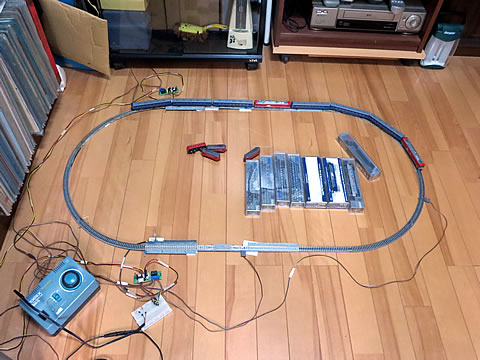
そして、客車3両ずつを電気機関車に走行させた作動をチェックした。 その時の動画を下に示す。

この様子を見ていると、
- PWM制御方式のコントローラでも、制御ユニットは問題無く作動してる。
- フライホイール搭載の動力車は止まるまでに慣性にてある程度の距離を走ってしまうので、ある程度の距離を確保しておく必要がある。
しかし、課題も見えてきた。
- 車両停止時には、客車の室内灯も消えてしまう。 これは当然であるが、何とか対策したいものである。
- 折角の停止処理をしているにも関わらず、それを無視して通り過ぎてしまう場合もある。
課題1に対しては、デューティー比が小さなPWM電源を別に用意して、リレーがON の時(通電を遮断している時)には、こちらの電源と接続させるようにすると対応できるのだが、これまたかなりの追加工作が必要となるので、その可能性を考慮しておいて、対策無しで進めよう。
課題2に対しては、或る程度の予想はしていたものの、腕を組んだままで茫然と眺めていました。 原因は室内灯を組み込んだ車両にあるのです。 いや、室内灯を組み込んでなくても、集電台車を組み込んだ車両でも起こりうるのです。 即ち、客車や電車類はその対象になります。
閉塞区間を設置するために線路に設けたギャップの位置を、車両が跨いで通過する時、閉塞区間の前後を通電台車を履いた車両が通電させてしまうからです。 最後尾にテールランプを点灯させるために組み込んだ通電台車も対象になりますし、TONIX の新幹線モデルの様に通電カプラーを組み込まれたモデルでは先頭から最後尾まで通電しているので最悪です。 それでも、対応策として、閉塞区間の設定を長めにし、TONIX の新幹線モデルでも充分に収まるような長さを取るようにしましょう。 物置部屋のレイアウトでは、待避ホームに収まる長さを基準として走らせることにします。
後続車との接近防止については、対策がありません。 せいぜい速度差の大きな車両同士は一緒に走らせないようすることぐらいですかね。 センサの位置、前方のギャップの位置、フラホイール搭載車の惰性走行距離などのバランスをとって設定する必要があるのですが、色々な車両があるので、エイヤーと決めるしかないようです。 テールランプの赤い光に惑わされて、後を追っかけないようにしておきたいものです。
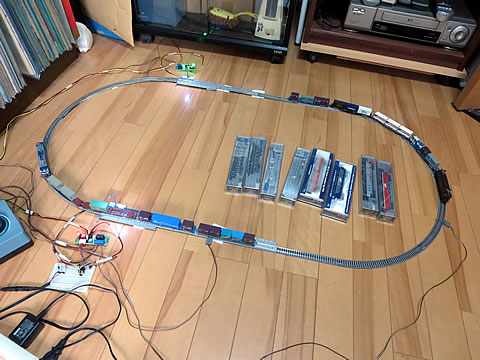
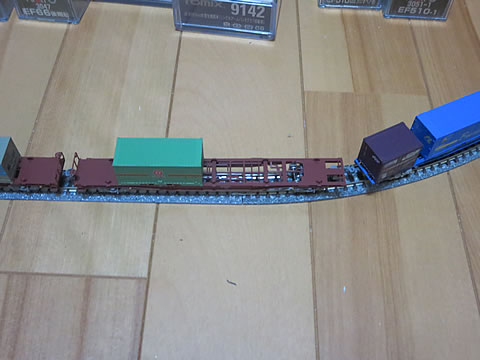
■ コンテナ列車の運行
コンテナ車の場合は、フレームが隙間だらけなので、その隙間を感知して誤動作する恐れがあります。 そこで確認してみました。

 .
.
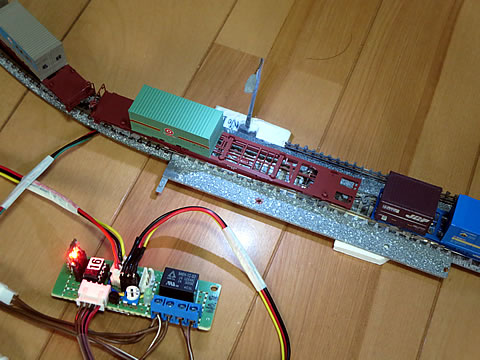
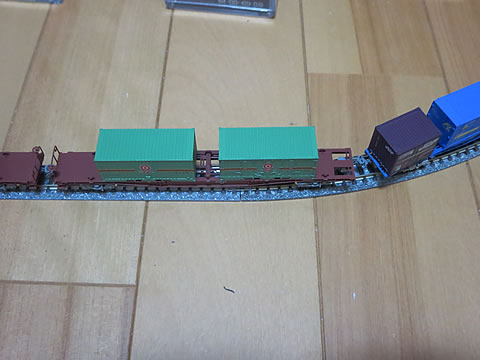
もうバチバチですね。 コンテナの無い部分ではセンサが反応し、列車は通り過ぎたものと判断して次のステップに移行してます。 即ち、前方区間は空いたとして次の列車の進入を許可しているのです。 さらに、連結部の隙間も怪しい。
また、手前の信号を見ていますと、赤から橙に代わり、緑にかわるはずですが、橙が飛ばされている様子もみられた。
コンテナは隙間の無い様に積み込めばなんとかなりそうですが、大きなコンテナの場合にはそれでも隙間が発生していますね。 前方の通過センサの閾値を調整しましたが、完全には解消できませんでした。
次に、編成の長さを変えてみましたが、こちらは何ら問題ないようです。
橙が飛ばされているロジック飛びに対する対応としては、ロジック上でダブルチェックを入れてみるのも考えられます。
こういったソフト上の調整は、システムの完成度を上げるためには必要なのですが、対応する場合の状態をあれこれ変えて、プログラムのロジックを変えたり、数値を変えたりし、それを実際に走らせてチェックしてみる必要があるのですが、大変面倒な作業ですね。 システム屋の苦労が分かるような気がしますが、これが楽しいのかも知れません。
2018/9/22 作成