
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう ビデオ撮影を使った解析 No.1
卓上レイアウトで楽しもう ビデオ撮影を使った解析 No.1
また、突然に変わったタイトルとなりましたが、いま四苦八苦しているシステムがあります。 その解決のために、ビデオを使って不具合対策を実施しているのです。 まずはその様子を紹介しましょう。
■ 検討している自動運転システム
検討している自動運転システムは、下左の写真に示すような単純な周回路に待避線を設け、後ろから迫ってきた列車を自動的に追い越しさせようとするシステムなのですが、これがなかなかの曲者でした。 そこで、下右の写真のようにビデオカメラを設置し、不具合発生の状態を撮影してから後からゆっくりと状態を観察することにしたのです。 これは自動車のドライブレコーダと同じですね。


運行ダイヤに従ってシーケンスを組んでいく場合は、操作の順番が決まっているので、順次実施して行けば良いのですが、今回実施しようとするシステムは、後ろから迫ってきた列車の有無を判断し、その後に実施する操作を決めなければなりません。
そして、その追越し操作もいろいろな状態を判断しながら実施する必要があるのです。 さらに、2編成での電車では面白くないので、欲張って3編成の電車を同時に走らせようとしているのです。 電車は、一編成につき3〜4両程度の編成を考えています。
この自動運転システムでは、レイアウト上に3編成の電車を右回りに走行させ、左上に設けた内側の待避線に待避させ、後続の電車を外側の本線上を通して追い越させようとするものです。 そしてうまくいけば、右下の待避線にもそのシステムを応用しようと目論んでいました。
制御機器は、電車の通過センサを当初はS1からS4までの4ヶ所に設けていました。 S5は後から追加したものです。 ギャップによって周回路を二つに分け、それぞれにF1とF2の給電ポイントを設けています。 そして、待避線には独立してF3の給電ポイントを設けています。
■ 最初に考えたロジック
待避線のあるポイントの手前まで来ると(センサ S1がON )、後続電車が来ているかどうかを判断するために、センサS2のON/OFF をチェックします。 もし、S2がON であれば、ポイント P1 を反位に切り替えて待避操作に入ります。 そして、待避線上のセンサ S3 がON になると、ポイント P1 を定位に戻して後続電車を本線上を通過させ、センサ S4 がON になると通過したものと判断して、待避線にて停車中の電車を発車させるのです。
ここでの注目点は、センサS2の検出方式なのです。 TOMIX 方式のセンサは、車輪の通過を検知していますので、タイミングによってはそこに電車がいる事を確認出来ません。 電車は存在するものの車輪が無いとパルスが出ませんので、電車の有無を判断するセンサとしては、なまけものの誤りとなります。
車輪の通過は検知できるのですが、電車の存在を検知できないのです。 これでは、このシステムの目的に合致しませんので、確実に電車が存在することを検知するセンサが必要なのです。
即ち、今まで使用してきた2個のCds光センサを使った通過検知センサが必須なのです。 このセンサは、電車が来た事、通過中である事、通り過ぎた事を確実に検知できるセンサなのです。 そこで、「卓上レイアウトで楽しもう 自動運転 その15」(2020/1/28)で工作した信号機を作り直して、センサ信号を取り出すように細工しました。
その状態を下に示します。 なお、センサ検知回路はTOMIXと同様に負論理回路に変更しました。 即ち、センサがON の時には出力信号はLOW となります。
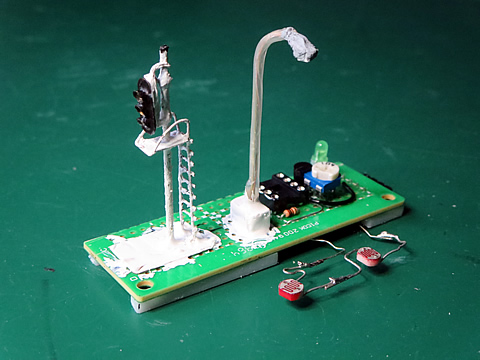

どうせ同じ工作をするならばと、2台とも同じ様に工作し、それぞれS1とS2のセンサとしました。
そして、上記のロジックをスケッチで記述し、これによって、自動的に追越し運転が出来ると踏んで、走らせたのですが・・・・・・・・・・・・・。
最初のロジックによるスケッチ ⇒ Every_10-1
色々な不具合が多発してしまったのです。 その状態を再現させるのもうまく行かないので、ドライブレコーダの例に習って、ビデオを持ち出したのです。 そのビデオ撮影を使った解析の例を次に紹介しましょう。
■ ビデオ解析-1
まず、動画で紹介しよう。 最初に待避モードがうまく作動した状態を紹介しますが、その後に、不具合発生の状態も再現しています。

トラブルは、後続の電車が待避線に入ってしまう事と、その電車の最後尾がポイント部分で脱線していることです。 ビデオを巻き戻したりして検証した結果、次のように推測しました。 待避線上のセンサS3によってポイントを定位に戻すのですが
- ポイントを定位に戻すタイミングが遅かったために、後続電車も待避線に入ってしまった。
- ポイントを定位に戻したことによって、後続電車の最後尾が脱線した。
ことが判明した。 この対策として、
- ポイントを定位に戻すタイミングを後続列車がポイントを通過する前に実施する。
- このためには、待避線に入線した電車がセンサS1を通過後(S1/OFF)後に、次にONになったタイミング(後続電車が来た)でポイントを切り替える。
と言うロジックに変更することにした。 幸いにもセンサ1も光センサを使用していたので、このようなロジックが簡単に採用出来たのである。
改良したロジック ⇒ Every_10-2
■ ビデオ解析-2
改良したロジックによるスケッチを使って、運転した例ですが、次なる問題が発生しています。

待避線の入口での問題はうまく処理できたのですが、今度は出口での問題です。
待避線の電車を出発させる時は、出口のポイントを切り替えて出発させています。 このため、本線上の給電はポイント部分で切れてしまうので衝突しないものと踏んでいたのですが、読みが甘かったようです。 本線上の電車は既にポイントを越える所まで進んでいたのです。
この対策として、待避線で電車が止まっている場合には、本線上の電車も強制的に停止させる方法がありますし、あるいは、本線上の電車をスルーさせる方法がありますが、いずれの場合も本線上にセンサが必要です。
今回は、新しくセンサ5を設け、本線上に電車がいる(走行中)の場合は、その電車を通過させてから発車させるようにすることにしました。 ここでも、車輪センサではなくて車体を検知する光センサが必要となったので、新しく工作しました。 それがセンサS5です。
■ ビデオ解析-3
この他にも問題はまだありました。

ビデオ解析-1の対策が裏目に出ており、切り替えるタイミングが早すぎたのです。 ポイント切り替えのタイミング調整が微妙ですね。
■ ビデオ解析-4
もし、電車同士が合体してしまったらどうなるのでしょうか? その事例に遭遇した時の状態を紹介します。

最初の場合は、長すぎた電車は後ろから押されて脱線しています。 また、本線を塞いでアウトです。 また、Bトレ電車の場合、合体して7両になった場合でも、正常に作動しています。 センサの位置の関係でその条件は影響されますね。
今回の報告はここまでとして、センサS5を追加した場合の状態を次の報告で紹介します。
2020/4/18 作成