
HOME >> 鉄道模型自動運転システム > 到着信号処理回路の改良
登山鉄道自動運転システム 到着信号処理回路の改良
■ はじめに
先回のテストでは、プログラムの不安定な状態がたびたび発生した。 これは通常のモータが発するノイズの影響で、誤動作が発生していると想定して、もう一度、到着センサを再チェックしてみることにした。
■ PWM制御周波数とノイズの発生状態
通常モータではノイズの発生は避けられないが、「往復運転モデルを作る その1」にて実施したコンデンサ追加による対策ではうまく行ったと判断していた。 しかし、この対策でも不十分なのだろうかと疑いながら、まずは、PWM制御のパルス周波数をTomix のパワーユニットの様に20Khz近くまでアップさせてみることにした。
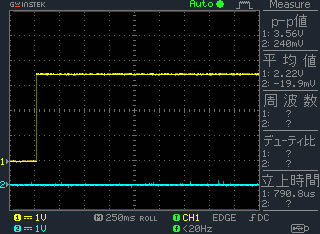
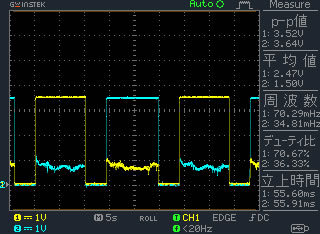
テストは、「往復運動モデル2を作る」 のテスト走行モード 2−1で実施した。 レールエンド両端の到着信号について、トランジスタによる波形整形後の電圧をオシロを使って波形を観察した。 まずは鉄コレ車両でPWM周波数は10KHz の場合を下に示す。
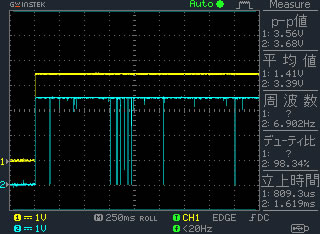
測定中は、ノイズの状態に気を取られていたのでゆっくりと観察していなかったのだが、じっくりと観察すると両方のセンサがON になっているのもおかしいのである。 どのタイミングできろくしたのだろうか?
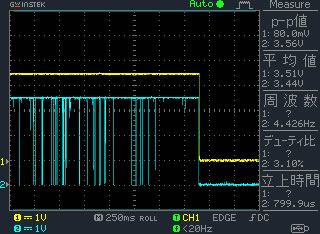
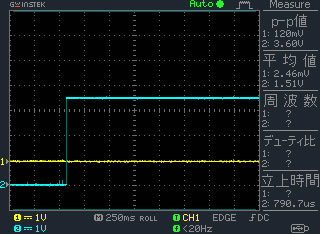
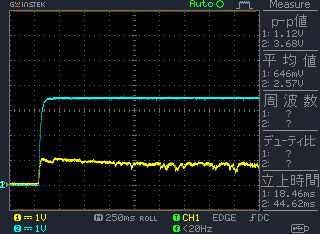
とにかくノイズがおおかったので今度はC12 を走行させてみた。 その場合を下に示す。
両端のセンサは交互にON/OFF し、ノイズも見当たらないのだ。 そこで、周波数を15KHz に上げてみた。 まず、C12 の場合は、
全く異常が有りませんね。 今度は、鉄コレ車両の場合、
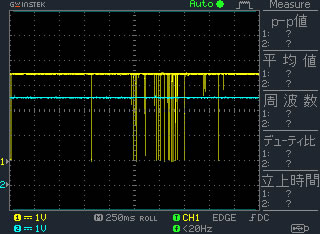
やっぱりダメですね。
今回使用しているモータドライバは、東芝製の TA7291P であり、カタログによるとバイポーラ型のDCモータ用フルブリッジドライバである。 カタログにはどこまでの周波数まで応答できるのか記載がないので素人にはよく分からないが、何でもバイポーラ型は応答性が良くないとの事らしい。 高周波の場合にはMOSFET型を使うらしいのだ。 この件は途中から気が付いたが後も祭りである。 周波数を下げて使用するしかないのだ。 そして、到着信号処理回路についても、しっかりとローパスフィルターを設けてガードするしか無いのである。
なお、コアレスモータの場合は、ノイズが少ない事は明らかですが、パワトラがおかしいのですからPWM制御が有効に働いているのかどうか不明ですね。
■ ローパスフィルとの検討
もう一度回路図に立ち返って、ローパスフィルターを検討した。
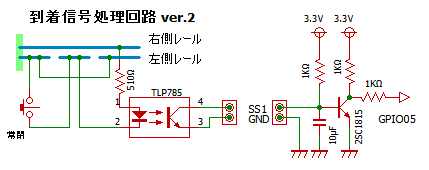
実施していた ver.2 の回路を見ると、ラズパイへの入力前に 1KΩの抵抗を使用している。 そうだこれを使ってCRローパス・フィルタ回路を構成すれば立派なローパス・フィルタになることに気が付いた。 そして、ネットでそのカットオフ周波数を計算してみた。
計算は、 「フィルタ計算ツール」のサイトを利用させてもらいました。 R = 1K、C = 10μF として起算した結果を下に示す。
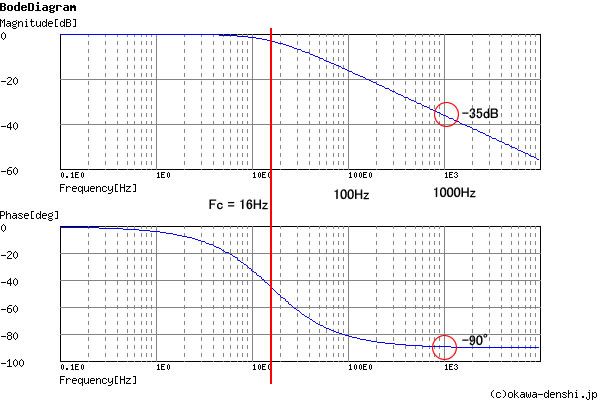
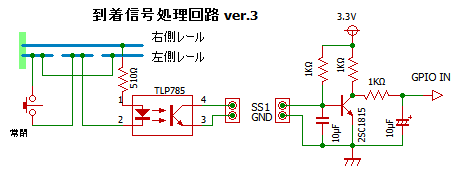
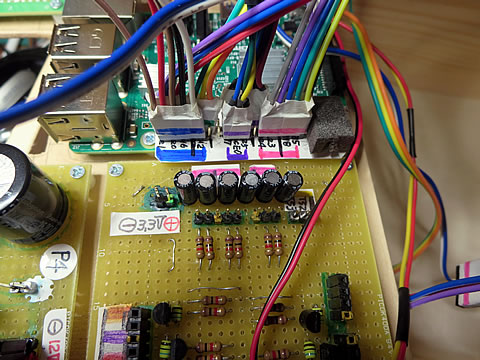
カットオフ周波数は16Hz で、1KHz では -35dB もの減衰となり、立派なローパス・フィルタとなることが分かった。 回路の手直しは 10μFのコンデンサを追加するだけで対応できるのだ。 そして設置場所も、この事態を予想していたかのように広いスペースが空いており、下記のように問題無く追加加工が出来た。
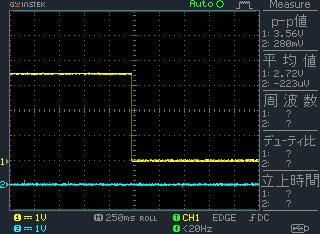
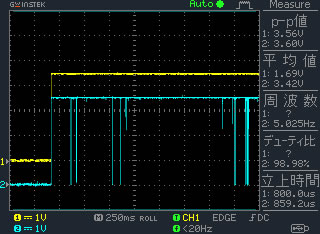
そして、実際に鉄コレ電車を走らせたときのオシロ波形を下に示す。 PWM周波数は 1KHz に設定している。
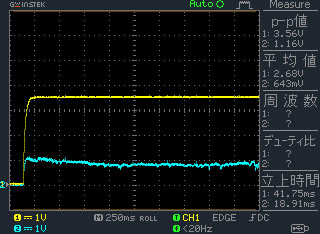
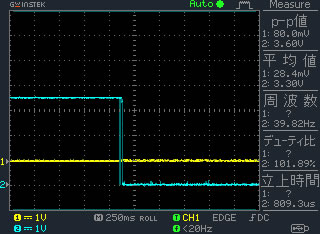
ノイズも嘘のように無くなっており、往復走行に従って両端のセンサも交互に ON/OFF しているのが分かる。 次にTOMIX の登山電車の場合もチェックしてみた。
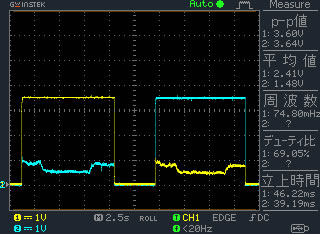
何ら問題無いですね。 また、走行中のマイナス側の電圧の変化は途中から速度が変化したことを示し、DCモータによるフリーホイール電圧の影響が出ているのではないかと想定するのですが、如何でしょうか。
とにかく、また一つ問題が解決できたので、さらに前に進むことにしよう。
2017/5/31 作成 M.T.