
簡易形ATSシステム
■ はじめに
物置部屋に設置された我がレイアウトは、概ね円形をなす2重巻きの複線路線である。 そして、一度に走らせる事が出来る車両は、10両編成程度の列車を内回りと外回りの2編成のみである。 それ以上の編成を入線させると、追突発生に気を配りながら、駅の退避ホームを利用して追い越し操作を実施しなければならない。 数回の操作なら面白がって実施するものの、だんだん面倒になって来て、ついには退避ホームにて停車したままの状態になってしまう。
レイアウト上で鉄道模型を走らせるやり方は、人それぞれと思うが、自分はまったりとした気分でぼんやりと眺めているのが一番楽しい時間である。 50年前の丘の上から見ていたD51の貨物列車や、遠くの鉄橋を渡る汽笛を思い出しながら、あれこれと空想しているのである。
こんな時には、旅客列車や貨物列車を追突しないように自動的に運転したくなるのであるが、DCCシステムには資金面で手が出せない。 簡易形で充分なので、何とか追突防止のATSシステムを手作り出来ないかと挑戦してみる事にした。 欲張って、内外3編の6列車を同時運転することを目標としよう。
■ システムの概要
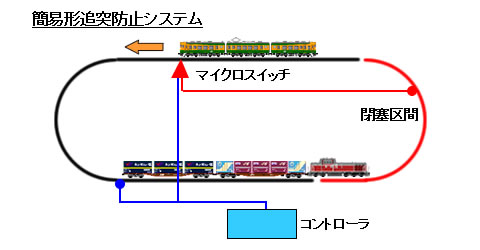
Arduino には挑戦しているものの、電気系は詳しくないのでメカ的な方法で実施してみる事にした。 そこで、右のイラストの様な、マイクロスイッチを使用した簡単なシステムを考えるみる。
マイクロスイッチを作動させるメカを検討すればこのシステムは成立すると睨んだのである。 このマイクロスイッチを使った車両の通過センサーをレイアウト上に幾つか設置すれば、自分でも工作出来るそうな気がした。
色々な参考書や先輩の方々の実施例をネットで参考にさせてもらったが、電気的なセンサーを使い、マイコンで処理しているのが殆どであった。 電子制御によるシステムにすると、幾つかの閉塞区間を設置した場合に、それに対応したリレーを制御する必要があり、通過センサーの判断処理とリレー処理を同時に多数実施しなければならなくのでは・・・・・・・? との拒否反応により、一歩引いてしまうのである。 もし、各閉塞区間で独立処理出来る右の様な簡単なシステムが成立できるのであれば、後は力技となるので自分でも実現可能と考えたのである。
通過センサーは、モータの搭載有無にかかわらず通過中の車両を検出し、その間は、後方に設けた閉塞区間の供給電源をカットすればよいのである。 列車が通過し終わると電源を復帰させ、停車している車両を発車させればよいのである。 通過センサーと閉塞区間の間は、自分の列車の長さ以上は必要である。 これは自分の後方の車両の室内灯を消さないために必要な長さである。 さらに、停車している車両の頭は、閉塞区間の最前列に停車している場合もあるので、そこからスタートした場合に、先行する列車に追いつかない距離とする必要もある。 また、閉塞区間は通電カプラーを搭載した車両を考慮して、想定する編成の長さ以上の区間長さが必要であろう。
ここで、通過センサーは、先頭車両のみならず、途中や最後尾の車両までも検出する必要がある。 その間に電源をOFFした状態で保持する必要もある。
■ 通過センサーの試作
まず、システム成立のカギとなる通過センサーを検討することにした。 実はこのアイディアは、1年も前からあれこれアイディアを練っていたのである。 今のレイアウトに追加工事で容易に設置できることが条件である。 今年の3月にはマイクロスイッチも試験的に購入していた。 つい先日、Joshin のキッズランドで、ミニ四駆用のスポンジタイヤ付き車輪を見つけ、これだ! とばかりに早速工作を始めた。
 .
.
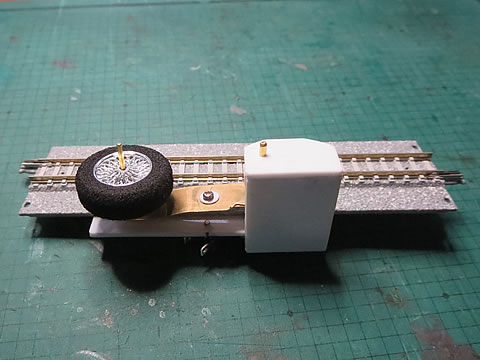
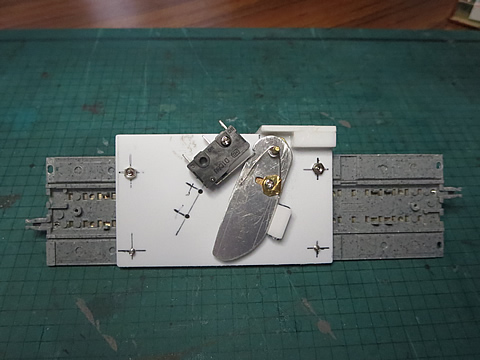
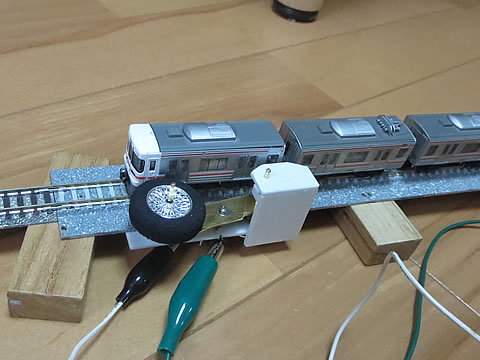
その試作品を上に示す。 車両の側面に接触するスポンジタイヤ付き車輪をレバーで支持し、そのレバーの軸を線路脇で保持して、車両が通過する時にタイヤは軽く回ると共に、タイヤを保持するレバーが揺動するようにしている。 レバー軸の支持は、スパンを長くとって安定性を確保する。 右の写真。 さらに、レバーを2分割して設定角度を調整出来るようにしている。 メカ構成には自信あり・・・・・。
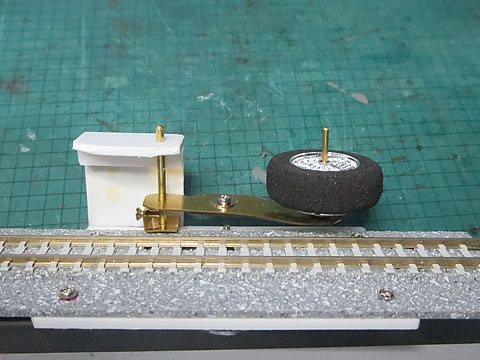
次に、線路裏にマイクロスイッチの作動メカを配置する。 下の写真。 センサの本体は2mm 厚さのプラ板で構成し、レールとはM2のネジで固定されている。
スイッチを作動させるレバーも2重にしており、一方はレバー軸にハンダ付けし、スイッチを作動させるレバーは、これも調整可能なようにネジ止めされている。 軸にハンダ付けしたレバーは、下の写真ではアルミのレバーの下に配置している。
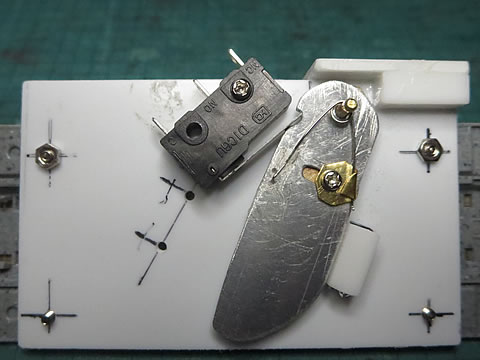
詳しい説明は省略するが、マイクロスイッチの取り付け位置は、レバーの先の方に取り付ける予定であった。 その取り付け穴も開けて組み付けたのであるが、スイッチの作動力が意外と大きい事に気が付いた。
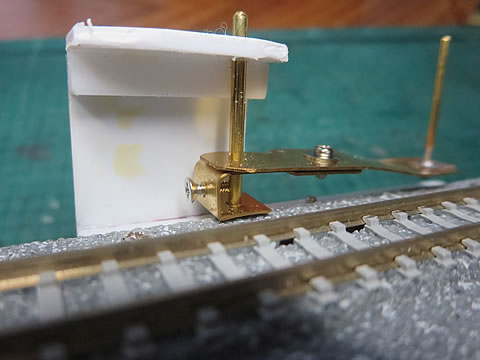
工作が出来た時点で試しにBトレ車両を走らせてみたが、車両は見事に線路からぶっ飛んでしまった。 タイヤにはじかれたのである。 レバーの作動力が大きく、車両の通過を阻止したのである。 しまった! とばかりに、マイクロスイッチの位置を変更してレバー比を変え、さらに2重のレバー間にバネを配置してレバーのストロークを逃がす構成に変更する。 その状態が下の写真である。 これによって、30グラム以上もあったレバーの作動力は11〜12グラムと小さくなったが、これで試してみる事にした。 マイクロスイッチの作動力は、30〜35グラムであった。 作動力を考慮していなかったのは完全に設計ミスである。
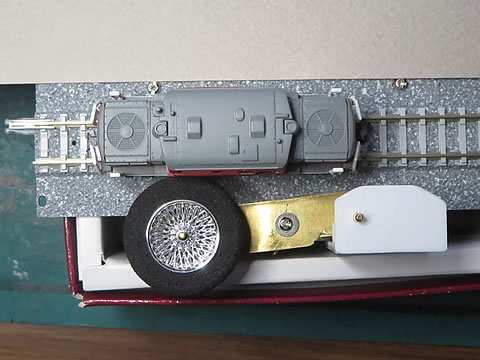
下の写真は、車両(Bトレ)を線路に乗せた状態である。 レバーによる押しつけ力によって、重りで加重した車両でも少し傾いている。 タイヤの当る位置もなるべく下の方に当たるようにレバーを調整した。

■ システムでの走行テスト
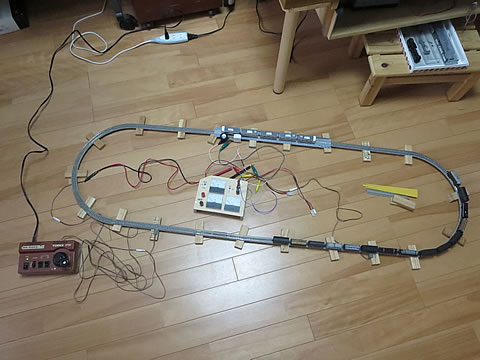
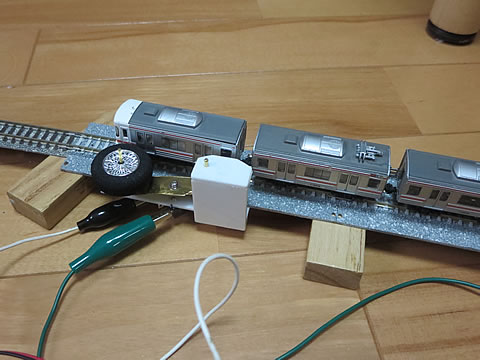
この通過センサーを使って簡単な円形レイアウトを組み走行テストを実施した。 通過センサーを取り付けた線路の下側にはレバー部があるため、線路を10mm 以上持ち上げなければならない。 このため、孫達が使っていた積木を使ってかさ上げしている。 下左の写真。 マイクロスイッチと供給電源を接続し、電気のON/OFF を確認するために、電圧計を介してレールに接続している。 閉塞区間を作るために、線路の片側のジョイントを取り外し、片側の線路を簡易絶縁としている。

Bトレ車両を走行させた時の通過センサーの状態を下に示す。 車体が少し傾くものの、センサーを作動させて通過する事が出来ている。
走行中の動画を下に示す。 初めてYouTube を利用して動画をアップしました。

テストでは、Bトレ車両や2軸貨車などの軽い車両を走行させているが、動画を御覧のように、まだマイクロスイッチのバネ力に負けている様子である。 軽い車両では横に飛ばされて脱線する場合があった。
しかし、通過センサーは機能しており、この短いレイアウトでも、2編成を問題なく走行させる事が出来ている。 しかし、貨物列車の機関車をKATO のC56 に変えて走行テストを実施してみたが、C56 の速度が遅いため、閉塞区間で止められた後続の313系電車が次の閉塞区間に達するまでに追いついてしまい、追突防止にはならなかったのである。 センサの位置や閉塞区間の長さの関係で、列車の速度差の限界があるのです。 走行させる列車の速度差は小さい方ことが望ましいが、システム設計には、この関係も考慮して置く必要がありますね。
今回のテストのように、簡単な通過センサーでも工夫すれば可能な様ですが、タイヤ付きセンサーはやはり異様ですし、力の関係も難しそうなので、この単純なメカ式通過センサーは、“ 却下 ” とすることにしました。 思い切って非接触の電子的なセンサーとリレー回路を検討することにします。