
HOME >> 鉄道模型工学 > 測定データ 特性線図から何が読み取れるか
測定データ 特性線図から何が読み取れるか
■ 特性線図から何が読み取れるか
動力特性の測定の自動化システムにおいて、いろいろな特性を読み取るべく工夫してきた。 しかし、KATOの最新モデルである C57 4次形を測定したが、測定データを見ながら考え込んでしまった。 見た目には安定した走りを見せているのに、データとしては、少しバラツイた不安定性を示す測定データが得られたのである。 KATOの技術陣が努力してきた結果が、少し安定性に欠けるデータとなっているのは、なぜ・・・・・・・?
一台の、それも一度だけの測定で結論つけるのは拙速と思うが、感性で評価する場合とデータで評価する場合の違いの難しさを感じてしまった。 自動車業界で食べてきた者としては、フィーリング評価の重要性を認識しているので、データ万能ではないことを重々承知しているが、測定方法などを苦労して改良して来た事が無駄であったのだろうか・・・・・・・などの自問が湧きあがってきた。
そこで、今回は初心に戻り、これらデータとして得られた特性線図から何がわかるのか、何が読み取れるかを整理して、自分が実施してきた模型車両の動力特性の測定について、少し振り返ってみることにした。
.
■ 速度特性
最初に、もっとも基本的な速度特性について整理してみよう。 試験装置は、下に示すように、一周が 2888mm のオーバルコースで、直線部分が558mm あり、その終端部で速度を計測するゲートを設けている。 給電は、菊水の安定化電源を使用し、二か所の給電ポイントから給電している。
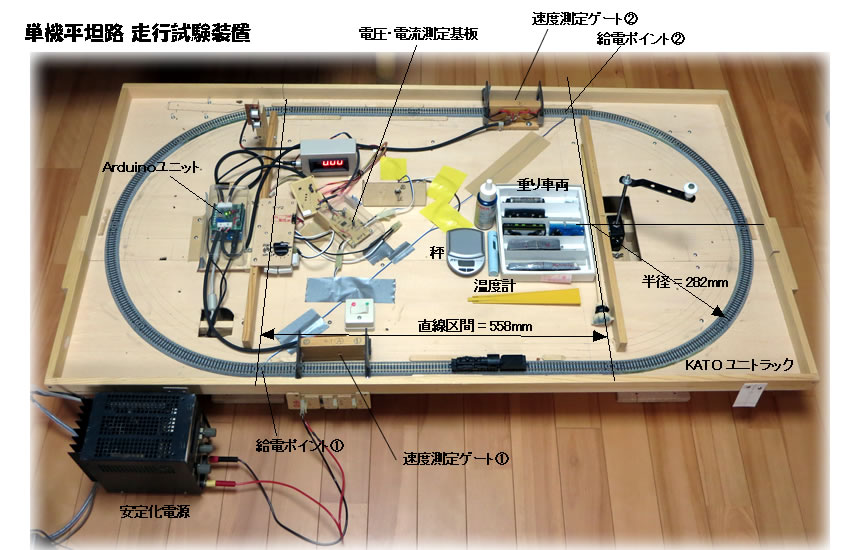
測定方法は、試験装置を水平に保ち、試験動力車のみ走行させて、供給電圧を変えながら、電圧、電流、および速度を測定する。 車両が直線区間に入ると電圧を一定に保ち、充分な安定状態で速度を測定するようにしている。 測定値は、Arduino からパソコンに送信され、Excelによって計算処理される。 速度測定ゲートを通過する間の電圧と電流は、その平均値を計算して、速度データと共にグラフに表示する。
これらのデータは、一定の条件を保った状態のデータ、すなわち静特性のデータである。 即ち、停止時から発車していく過程や、速度が変化していく状態などの動特性を測定する事は出来ない。 また、測定は30回、すなわち15周をひと区切りとして、4回連続して測定するのを原則としている。 そして、最低電圧から最高電圧まで、少しずつ変化させ、何度も往復させて測定している。 従って、 30×4 = 120 個のデータが部分的に連続して得られる。 この間の時間は、およそ20分程度である。
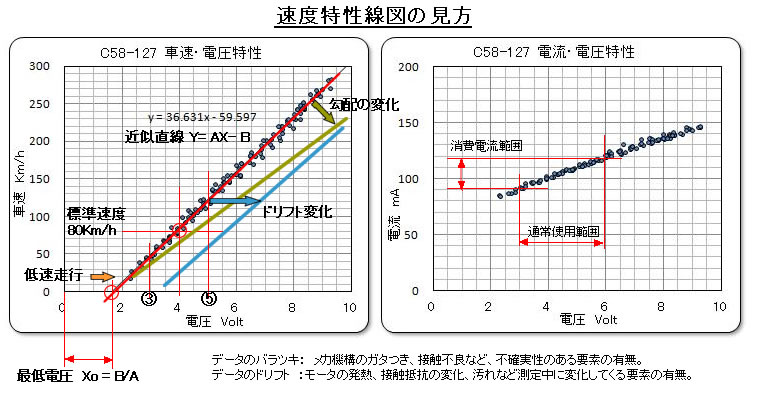
これによって得られる特性線図を下に示す。 特性線図は、車速と電圧、および電流と電圧の二つのグラフが同時に表示される。 この得られたグラフを下に示す。 これからどんな情報を読み解くかを説明しよう。
| グラフの内容 | 得られる指標 | 指標の内容 | 指標の意味 |
|---|---|---|---|
| 車速-電圧特性 | 全般 | このモデルのねらい | このモデルの設計のねらいは、高速走行車両か低速走行車両かをみる。 Nゲージのコントローラは、一般的に 0〜12 ボルトまで調整できるが、通常は4〜6ボルト付近で使用する。 このときのスケール車速が、低ければ低速走行を狙いにした車両であり、高速であれば、新幹線などの高速車両と判断できる。 |
| リニアリティー | 伝達機構の特異性 | 鉄道模型の一般的な駆動機構はDCモータと減速機構で構成されているため、その特性は直線的な特性になるが、何かの要素が影響してその特性を変化させ場合がある。 影響要素は未解析である。 | |
| データのバラツキ | 性能の安定性 | メカ機構のガタつき、接触不良など、不確実性のある要素の有無が想定される。 影響要素は未解析である。 しっかりと作られているモデルではバラツキが少なく、安定しているといえそうである。 | |
| データのドリフト | 性能の安定性 | モータの発熱、接触抵抗の変化、汚れなど測定中、あるいは経年変化によって変化してくる要素が想定される。 影響要素は未解析あるが、原理的には内部の摩擦抵抗が大きくなると右にドリフトし、汚れなどによる電圧降下が大きくなった場合にも右にドリフトする。 右にドリフトする事は見方を変えれば、右上がりのグラフのために下にドリフトすることと同じであり、同じ電圧でも速度が落ちる結果となる。 | |
| 速度勾配 | 運転のしやすさ | コントローラのダイヤル量と車両の速度の関係を知る事が出来る。 勾配がきついと速度変化が大きく、扱い難くなる。 この勾配はモータの特性やギヤ比、動輪直径などの諸元によっておもに決定されるので、運転中や経年による変化は少ないと判断している。 | |
| 低速性能 | 微速走行の可能性 | どれだけ安定的に低速走行をさせる事が出来るかを知る。 最近のモデルでは、スケール速度が10Km/h程度の超ノロノロ運転も安定して走行できるモデルも出現している。 但し、連続走行中の調整であり、測定ゲートにて速度を測定しているため、発車時の飛び出し状態などは測定できないのがこの測定方法の欠点である。 | |
| 立ち上がり | 最低電圧 | 車速−電圧データの延長線が車速ゼロの点と交わる電圧を最低電圧Eoとし、 Eo= B/Aとして計算する。 この点と速度勾配によって、速度特性は数式化される。 駆動機構の摩擦抵抗の大小が現れる。 摩擦抵抗が大きいと、グラフは右にドリフトする。 したがってこの値は小さい方が良い。 発進させる時の電圧とは異なるので誤解のないように。 | |
| 4-6 Volt特性 or 3-5 Volt特性 |
重連走行の可能性 | 同じ速度特性の車両を容易に見つけるために工夫した特性線図で、重連走行が可能なグループかどうかが判断出来、4ボルトと6ボルトの2点の速度データをX-Y座標に表示させて、同じ仲間かどうかを一目で判断できるようにしたもの。 速度はデータを直線近似させた式から計算する。 上のモデルの場合は、標準速度 80Km/h が4ボルトであるため、その前後の、3-5ボルト特性の方が良いであろう。 | |
| 電流-電圧特性 | 全般 | 消費電流 | モータや照明の消費電流の大小を知る。 車速-電圧特性より通常使用範囲を想定して、その時の消費電流をみる。 ただし、この値は動力車のみで走行する場合であり、負荷車両を牽引している場合は、負荷に応じて消費電流は増加す。 |
| データのバラツキ | 性能の安定性 | メカ機構の摩擦など不確実性のある要素の有無が想定される。 影響要素は未解析である。 | |
| データのドリフト | 性能の安定性 | モータの発熱、接触抵抗の変化、汚れなど測定中に変化してくる要素の有無が想定される。 影響要素は未解析ある。 汚れなどで車両内での電圧降下が生じると、データとしては右にドリフトしていく。 | |
| データの勾配 | 電気系の抵抗 | モータが回転している状態での電気抵抗の変化をあらわしているが、影響要素は未解析ある。 |
■ 牽引力特性
次に牽引力特性を測定する傾斜路走行試験を説明する。 試験装置は、上記の装置と全く同じであるが、この試験ではリフト用のハンドルを操作して、試験台を傾斜した状態で使用する。
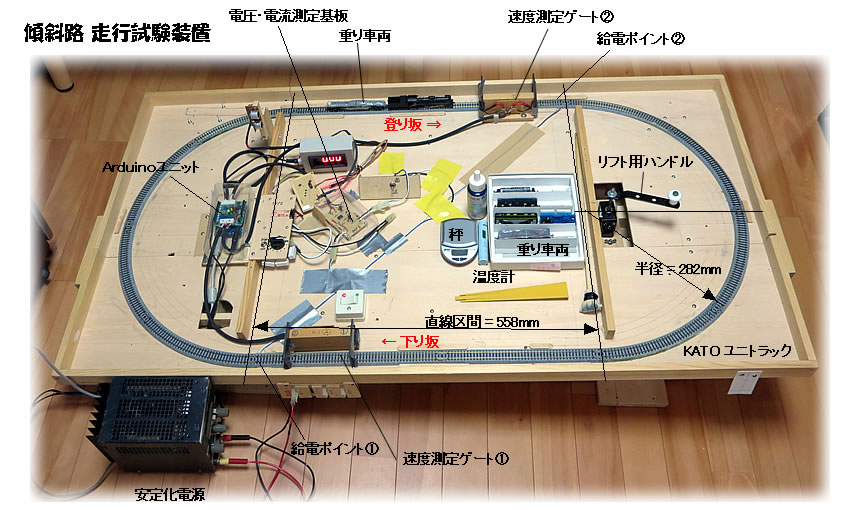
測定方法は、試験装置をリフト用ハンドルで随時傾斜させ、試験動力車には重り車両を連結して走行させます。 車両を右周りに走行させ、登り坂では負荷の掛った駆動状態を、下り坂では後ろから押されるている制動状態を作り、周回路を一周する間に、プラスとマイナスの牽引力を動力車に与える状態にしている。 この時の供給電圧、電流、車速、および傾斜角を測定し、測定値は Arduino からパソコンに送信され Excel によって計算処理される。 この時の動力車と重り車両の車両重量は事前に計測して置き、計算シートに設定しておきます。
供給電圧は、先に測定した速度特性より、適切な3種類の電圧を決めておき、その電圧を固定した状態で、傾斜角を変化させながら測定を実施する。 また、傾斜角が大きくなると登り坂を登りきることが出来なくなるが、このときは測定台の左側を手で持ち上げて傾斜をゆるくし、車両を坂の上まで走行させて、もとの角度で下り坂を走行させ、制動力を測定している。 平坦状態から最大傾斜まで、何度か往復させてデータを収集している。
測定は30回、すなわち15周をひと区切りとして、4回連続して測定するのを原則としている。 即ち、電圧パラメータひとつにつき、120個の測定データが得られる。 測定時間は、3種のパラメータで実施するので、およそ1時間は必要であり、測定開始時点と終了時点では、車輪やレールの汚れ状態、あるいはモータの発熱状態が変化して、特性にはドリフトが生じている可能性も否定できないので、測定前にはなるべく暖気運転を実施している。 重り車両は、重さの異なる車両を何種類か用意しているので、暖気運転中の登坂具合によって重り車両を選定している。
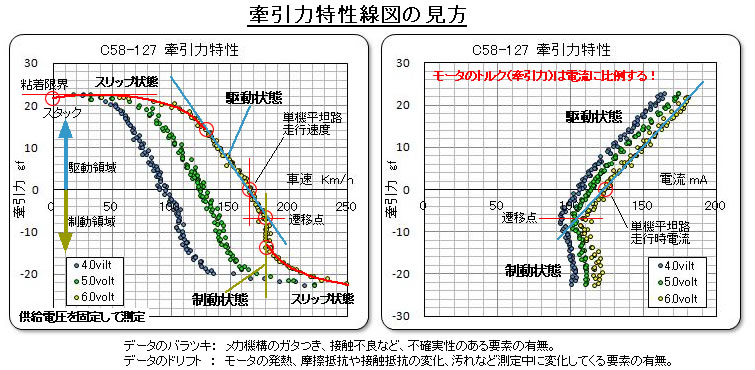
今回のデータも、一定の条件を保った状態のデータ、すなわち静特性のデータである。 これによって得られる特性線図を下に示す。 特性線図は、牽引力と車速、および牽引力と電流の二つのグラフが同時に表示される。 この得られたグラフを下に示す。 これからどんな情報を読み解くかを説明しよう。
| グラフの内容 | 得られる指標 | 指標の内容 | 指標の意味 |
|---|---|---|---|
| 牽引力-車速特性 | 全般 | このモデルの特徴 | 牽引力と車速のグラフは、色々な特性が総合されているので、全体のパターンは特徴のある多くのパターンを示している。このパターンを見れば、そのモデルの構造と特徴が分かるはずであるが、まだそこまでの経験とデータを持ち合わせていない。 |
| データのバラツキ | 性能の安定性 | メカ機構のガタつき、接触不良など、不確実性のある要素の有無が想定される。 影響要素は未解析である。 しっかりと作られているモデルではバラツキが少なく、安定しているといえそうである。 | |
| データのドリフト | 性能の安定性 | モータの発熱、接触抵抗の変化、汚れなど測定中、あるいは経年変化によって変化してくる要素が想定される。 影響要素は未解析あるが、原理的には内部の摩擦抵抗が大きくなると下にドリフトし、汚れなどによる電圧降下が大きくなった場合には左にドリフトする。 駆動状態では、右下がりの特性のために下にドリフトする事は見方を変えれば、左にドリフトすることと同じであり、同じ電圧でも速度が落ちる結果となる。 | |
| 牽引力のゼロ点 | 速度特性との差異 | 牽引力がゼロの点は、単機平坦路走行と同じ状態であるので、その時の速度は速度特性で得られたデータと同じはずである。 多少の違いはバラツキやドリフトとして許容するが、大きく異なっている時は、条件を整えて再測定が必要である。 | |
| 駆動状態の勾配 | モータのパワー余裕 重連のしやすさ |
この勾配は、モータ特性とギヤ比、動輪直径の諸元で決まる。 負荷が大きくなると速度が落ちるのは、モータのパワーが小さい事を示している。 勾配がねていると速度の落ち込みが大きいため、登り坂でのスピードダウンが大きく、ゼイゼイと言いながら登坂する車両であり、勾配が立っていると、負荷変化が大きくても涼しい顔をして走行する動力車と言うことが出来る。 また、別の見方として、勾配がねていると速度の落ち込みが大きいため、他の動力車の特性に合わせて速度を変える事が出来、重連させやすい動力車と言える。 勾配が立っていると自分の速度を守ろうとして踏ん張り、最後にはスリップ状態になってしまうので、重連は不可能である。 この直線の延長が速度ゼロとなる時の牽引力で、このモデルの発揮できる最大牽引力となるのであるが、その前に車輪がスリップしてしまうのが一般的である。 |
|
| 駆動領域のスリップ状態 | 動力車のスタック | 車輪の駆動力は車輪とレールの摩擦力で決まるが、その力は摩擦係数と動輪荷重の積となる。 摩擦力以上の力が掛ると車輪はスリップ状態となり、最後には前進することも出来ないスタック状態となる。 車輪の空回りである。 車輪は回転しているので、摩擦力は「ミューカーブ」と言われる動的な摩擦係数に従うことになる。 たとえモータの馬力が大きくても車輪がスリップしてしまうと、駆動力は発揮できない事になる。 これはまたモータ焼損の安全弁ともなっている。 | |
| 特性の横方向位置 | 運転のしやすさ | 速度特性でも知ることが出来るが、供給電圧によって特性を左右方向に移動させる事が出来る。 そして、スリップ状態を見ることによって、トレーラ車両を牽引している場合や、登り坂で登り切れる最低の供給電圧も推定することが出来る。 | |
| 遷移点 | 駆動機構の摩擦抵抗 | ウォームギヤの噛合い状態が遷移するポイントである。 この現象は「動力特性の基本式 減速機」や「制動領域での動力特性」で説明している。 このポイントを境にしてウォームギヤの噛合い状態が変化し、動力特性もかわってしまうのである。 そして、このポイントは、ウォームホイールから動輪までの摩擦抵抗とテンダー車輪などの摩擦抵抗の合計と一致している。 従って、この時のマイナスの牽引力を読み取れば、動力車の摩擦抵抗値を知ることが出来る。 | |
| 制動状態のパターン | 伝達機構の特徴 | 遷移点から下の部分が、動力機構の本来の制動状態である。 ウォームギヤにおいて、力を受け止めながら後退していく状態であり、逆効率を云々するゾーンである。 ウォームギヤの2条化とも関係する興味ある現象であるが、残念ながらまだ解析出来ていない。 ノッキング現象もこのゾーンで発生していると睨んでいる。 | |
| 制動領域のスリップ状態 |
制動力の限界 | 駆動領域と同様に、制動領域でもスリップ状態は発生する。 そしてスリップした分は速度増加として現れ、動輪は回転してはいるものの、それ以上にずるずると滑っている状態である。 ブレーキが利かないのである。 | |
| 牽引力-電流特性 | 全般 | このモデルの特徴 | 牽引力、即ちモータのトルクは電流に比例することを念頭にこの特性を見る必要がある。 このため、駆動状態では、直線的になり、ウォームギヤの噛合い状態が遷移するポイントで、特性は折れ曲がるのである。 このため、 この特性は多くの場合、くの字型のパターンをしている。 そして、遷移点から下のパターンも注目している。 動力伝達機構の特徴を示していると睨んでいるが、まだ解析出来ていない。 |
| データのバラツキ | 性能の安定性 | メカ機構のガタつき、接触不良など、不確実性のある要素の有無が想定される。 影響要素は未解析である。 しっかりと作られているモデルではバラツキが少なく、安定しているといえそうである。 | |
| データのドリフト | 性能の安定性 | モータの発熱、接触抵抗の変化、汚れなど測定中に変化してくる要素の有無が想定される。 影響要素は未解析ある。 |
************ 特性線図から何が読み取れるか (2014/7/8) を再編集 ********