
![]()
このページは、我が「鉄道模型工学」の概要を容易に理解して頂けるようにと、過去に報告した内容を整理し、新しく組み立てた筋道に従って再編集したものです。
このため、過去の報告内容を要約したり、他の項目に分類されていたページを取入れたり、脇道・寄道した内容をカットしたりして記述し直しています。 しかし、昔のページはそのまま残していますので、暗中模索時の状態や、結論にたどり着いた過程、さらには失敗例など、過去の記録も残した状態ですので、参考にして頂けると幸いです。
そして、鉄道模型工学概論の骨子の部分は、株式会社工学社のご尽力により、「機械技術者の鉄道模型実験室」として、出版して下さることになりました。
さらに、これを機会として、走行中の動力車のモータ回転数と電圧の測定方法や、モータのモデル化を進めて車両全体の解析を実施した内容についても、再編集を実施しました。 これは、別の意味では、自分の「終活」でもあります。
余分なものは捨てて整理し、必要な物だけを、息子、残念ながらいませんので、孫に残しておこう と考えているのです。
鉄道模型工学概論 再編集(1)
******* 第1章 動力特性の概要 ***************************
- ■ 動力特性の基本式 機械系 (2019/3/25)

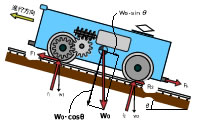 Nゲージの鉄道模型における静的な性能特性を検討する。 最初に機械系の構造をモデル化した。
Nゲージの鉄道模型における静的な性能特性を検討する。 最初に機械系の構造をモデル化した。- ■ 動力特性の基本式 電気系 (2019/3/25)
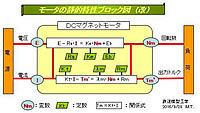 Nゲージの鉄道模型における静的な性能特性を検討する。 電気系の構造をモデル化した。
Nゲージの鉄道模型における静的な性能特性を検討する。 電気系の構造をモデル化した。- ■ 車両特性 (2019/3/20)
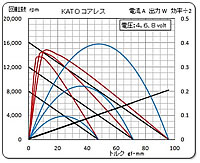
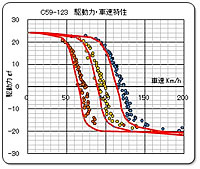
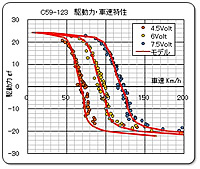
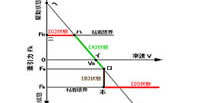 機械系と電気系の関係式をまとめて車両特性としてまとめた。式が複雑になったのでその内容を特性図として表示した。 この特性図よりNゲージ鉄道模型の動力性能の特徴を検討した。
機械系と電気系の関係式をまとめて車両特性としてまとめた。式が複雑になったのでその内容を特性図として表示した。 この特性図よりNゲージ鉄道模型の動力性能の特徴を検討した。
****** 第2章 測定装置の製作 *****************************
 Nゲージの鉄道模型における静的な性能特
Nゲージの鉄道模型における静的な性能特 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検鉄道模型工学概論 再編集(2)
- ■ 測定の自動化 システム構想 (2019/3/25)
 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検- ■ 測定の自動化 各要素の工作 (2019/3/25)
 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検- ■ 測定の自動化 機能テストとセンサの校正 (2019/3/25)
 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検- ■ 測定の自動化 システムの組立て (2019/3/25)
 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検- ■ 測定の自動化 測定の実施 (2019/3/22)
 先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
先に報告した「コアレスモータを搭載したKATO製のSLシリーズ」(2018/8/12) を検
鉄道模型工学概論 再編集(3)
******* 第3章 測定データ ***************************
- ■ 測定データの収集活用 (2019/3/16)
 測定装置によって動力車の特性が把握できるようになったが、そのデータの活用方法を紹介する。
測定装置によって動力車の特性が把握できるようになったが、そのデータの活用方法を紹介する。- ■ データによる裏付け (2019/3/25)
- 収集した測定データの活用の一つとして、疑問に思った現象のデータによる裏付けが出来た事例として、動力部への注油の効果について紹介しよう。
- ■ 特性線図から何が読み取れるか (2019/3/16)
 今回は初心に戻り、これらデータとして得られた特性線図から何がわかるのか、何が読み取れるかを整理して、自分が実施してきた模型車両の動力特性の測定について、少し振り返ってみることにした。
今回は初心に戻り、これらデータとして得られた特性線図から何がわかるのか、何が読み取れるかを整理して、自分が実施してきた模型車両の動力特性の測定について、少し振り返ってみることにした。
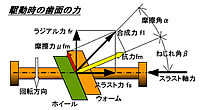
****** 第4章 重連特性 *****************************
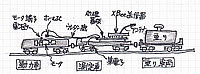
 動力車の重連時に働く現象を検討して問題点を探る。
動力車の重連時に働く現象を検討して問題点を探る。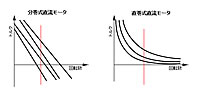 実際の車両では問題無いになぜ模型では問題になるのか、その原因と対処方法を検討した。
実際の車両では問題無いになぜ模型では問題になるのか、その原因と対処方法を検討した。鉄道模型工学概論 再編集(4)
- ■ 実験データでの検証 (2019/3/16)
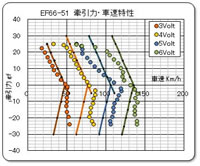
 2モータ式のEH系の電気機関車を使って重連特性の特徴を検証してみよう。
2モータ式のEH系の電気機関車を使って重連特性の特徴を検証してみよう。- ■2モータ化の効果を検証 (2019/3/16)
 EH系の電気機関車は2車体連結式であるが、Nゲージの多くの場合はモータは1基しか搭載していない。そこでモータを追加して2モータ化してものの、その高架について検証した。
EH系の電気機関車は2車体連結式であるが、Nゲージの多くの場合はモータは1基しか搭載していない。そこでモータを追加して2モータ化してものの、その高架について検証した。- ■ 小型の蒸気機関車の重連を楽しむ (2019/3/24)
 小型機関車をミニレイアウトでも走行させるため、重連させてその非力な力を補ってみよう。
小型機関車をミニレイアウトでも走行させるため、重連させてその非力な力を補ってみよう。- ■ 小型の蒸気機関車の重連を楽しむ 2286号機と2272号機 (2019/3/16)
 速度特性は一致しないものの、牽引力特性がゆるやかなので重連させてみた。
速度特性は一致しないものの、牽引力特性がゆるやかなので重連させてみた。- ■ 小型の蒸気機関車の重連を楽しむ Baldein 9 号機と Krauss 1412号機
(2019/3/16)  牽引力特性がゆるやかな他の組合せでも重連させてみた。
牽引力特性がゆるやかな他の組合せでも重連させてみた。- ■ 16両編成のBトレ新幹線を走らせよう (2019/3/16)
 サイズの小さいBトレはレイアウト上でも16編を走らせることが出来るが、問題は複数の動力車の重連問題である。4M 12T 編成のBトレに挑戦した。
サイズの小さいBトレはレイアウト上でも16編を走らせることが出来るが、問題は複数の動力車の重連問題である。4M 12T 編成のBトレに挑戦した。
鉄道模型工学概論 再編集(5)
****** 第5章 測定項目追加のための装置開発 ******************
解析を充実させるために、走行中の動力車のモータ回転数と電圧を測定しよう!
- ■ 走行中のモータ回転数と端子電圧を測ろう (2019/5/6)
 測定項目の追加として走行中のモータ回転数と端子電圧を測るために、無線通信による測定装置に挑戦した。
測定項目の追加として走行中のモータ回転数と端子電圧を測るために、無線通信による測定装置に挑戦した。
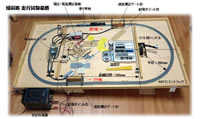
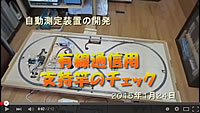
- ■ 有線方式による測定装置の開発 (2019/5/7)
 無線通信を使った測定方法をおよそ1年もかけて改善を進めたものの、未熟な技術力が故に最終的には 60 点の完成度であった。 このため新しく有線のままで測定できる8字旋回式の装置に改造する。 このために、ミニレイアウトにて8字走行の運行トライを実施した。
無線通信を使った測定方法をおよそ1年もかけて改善を進めたものの、未熟な技術力が故に最終的には 60 点の完成度であった。 このため新しく有線のままで測定できる8字旋回式の装置に改造する。 このために、ミニレイアウトにて8字走行の運行トライを実施した。- ■ 測定台の改造 (2019/5/7)
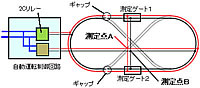
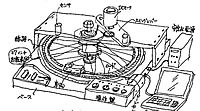
 8字パターンの線路を自動走行出来るように測定台を改造した。 さらに制御機器も製作して取付け、運行テストを実施した。
8字パターンの線路を自動走行出来るように測定台を改造した。 さらに制御機器も製作して取付け、運行テストを実施した。- ■ 有線通信のための工作 (2019/5/11)
 8字型レイアウトでの自動走行が出来るようになったので、次に通信線のための工作を実施した。
8字型レイアウトでの自動走行が出来るようになったので、次に通信線のための工作を実施した。- ■ 電源供給ラインとスリップ率不良の改善 (2019/5/13)
 残っていた課題である電源供給ラインの電圧降下とスリップ率不良現象の問題に対して改善を実施した。
残っていた課題である電源供給ラインの電圧降下とスリップ率不良現象の問題に対して改善を実施した。- ■ 測定データの処理方法 (2019/5/13)
 測定装置開発の仕上げとして、測定されたデータの処理方法を説明しよう。 そして、処理された実際のデータより、この測定装置の有用性を確認する。
測定装置開発の仕上げとして、測定されたデータの処理方法を説明しよう。 そして、処理された実際のデータより、この測定装置の有用性を確認する。
****** 第6章 モータ特性のモデル化 *************************
解析を充実させるために、モータ単体での特性を把握しよう!
- ■ 測定装置の開発の足跡 (2019/5/14)
 モータ特性のモデル化のために、まずモータ特性を測定する装置を開発する必要があります。最初は暗中模索で始めました。
モータ特性のモデル化のために、まずモータ特性を測定する装置を開発する必要があります。最初は暗中模索で始めました。- ■ 糸巻式測定装置の開発 その1 (2019/5/16)
 ゛モータの特性を自動測定しよう″ と言う厄介な虫が動き始めました。Arduinoやロードセルを導入したものの苦戦しています。
゛モータの特性を自動測定しよう″ と言う厄介な虫が動き始めました。Arduinoやロードセルを導入したものの苦戦しています。
鉄道模型工学概論 再編集(6)
- ■ 糸巻式測定装置の開発 その2 (2019/5/19)
 張力プーリー方式は見事に失敗し、モータのフライホイールに直接巻き付ける方法に変こする。データ収集は成功するも、コアレスモータが測定できない・・・・・・!
張力プーリー方式は見事に失敗し、モータのフライホイールに直接巻き付ける方法に変こする。データ収集は成功するも、コアレスモータが測定できない・・・・・・!- ■ 負荷反力式測定装置の開発 (2019/5/19)
 負荷反力方式でトライする。スイング軸にボールベアリングを採用したのは大正解であった。これでコアレスモータでも測定可能となった。
負荷反力方式でトライする。スイング軸にボールベアリングを採用したのは大正解であった。これでコアレスモータでも測定可能となった。- ■ モータのモデル化と摩擦損失の検証 (2019/5/23)
 式(18)は小生の考えが入った仮説の式なのである。 本当ですかと言われれば返事のしようもありません。 そこで、今までの測定データから、この仮説を納得してもらうしかありません。
式(18)は小生の考えが入った仮説の式なのである。 本当ですかと言われれば返事のしようもありません。 そこで、今までの測定データから、この仮説を納得してもらうしかありません。- ■ モータ定数の推定方法 (2019/5/23)
 モータ単体の特性が測定出来るようになったので、その測定データを使って、トルク定数とか逆起電力定数などを推定する工夫を実施しました。
モータ単体の特性が測定出来るようになったので、その測定データを使って、トルク定数とか逆起電力定数などを推定する工夫を実施しました。- ■ 測定したモータのリスト (2019/5/24)
- 実用に耐えうるモータ特性の測定装置が出来上がったので、手持ちのモデルに搭載されているモータの特性を測定した。 測定したモータについてリストとしてまとめてみました。
- ■ 特性解析のまとめ (2019/5/26)
 モータ定数を推定するExcelの計算シートを使って、モータを構成する6個の定数を推定することが出来た。 その推定データを比較して、各モデルの違いなどを検討してみよう。
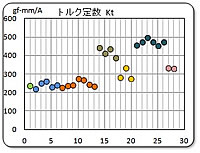
モータ定数を推定するExcelの計算シートを使って、モータを構成する6個の定数を推定することが出来た。 その推定データを比較して、各モデルの違いなどを検討してみよう。- ■ KATOのコアレスモータのデーをタ整理 (2019/6/13)
 蒸気機関車用モータの本命と目されるKATO製のコアレスモータについて、このモデルを表す定数として活用するため、その特性の平均値を求めてみよう。
蒸気機関車用モータの本命と目されるKATO製のコアレスモータについて、このモデルを表す定数として活用するため、その特性の平均値を求めてみよう。- ■ データのまとめと比較 (2019/5/27)
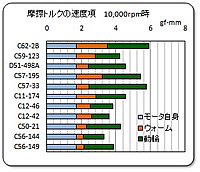
 モータを構成する6個の定数データを比較し、各モデルの違いなどを検討してきた。しかし、Bトレ用モータの場合単に定数だけを比較していても小型であることが浮かび上がってこないのである。
比較方法が不十分であると考え、モータの出力に注目して比較してみることにした。
モータを構成する6個の定数データを比較し、各モデルの違いなどを検討してきた。しかし、Bトレ用モータの場合単に定数だけを比較していても小型であることが浮かび上がってこないのである。
比較方法が不十分であると考え、モータの出力に注目して比較してみることにした。
鉄道模型工学概論 再編集(7)
****** 第7章 テーマ別による測定と解析 **********************
追加した測定項目を活用して、色々な現象を調査してみよう!
- ■ スリップ率の実体を捕える (2019/5/31)
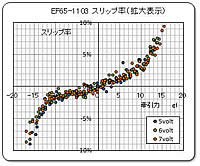 動力車のモータ端子電圧、あるいはモータ回転数が走行中に計測出来れば、解析の精度が向上すると考えて、その手段を工夫してきた。 そして、なんとか測定出来るようになったので、新たに測定可能となったスリップ率について、“鉄道模型工学”の観点から考察してみることにしよう。
動力車のモータ端子電圧、あるいはモータ回転数が走行中に計測出来れば、解析の精度が向上すると考えて、その手段を工夫してきた。 そして、なんとか測定出来るようになったので、新たに測定可能となったスリップ率について、“鉄道模型工学”の観点から考察してみることにしよう。- ■ トラクション・タイヤの有無を検討する (2019/5/31)
 トラクション・タイヤを装着した場合と、装着していない場合のスリップ率や電圧降下量などを比較観察してみよう。
トラクション・タイヤを装着した場合と、装着していない場合のスリップ率や電圧降下量などを比較観察してみよう。- ■ トラクションタイヤの有無を解析する (2019/5/31)
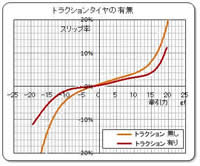 トラクションタイヤの影響を観察してみよう。今回は測定されたデータをもとに、データやグラフを加工して、解析してみた。
トラクションタイヤの影響を観察してみよう。今回は測定されたデータをもとに、データやグラフを加工して、解析してみた。- ■ トラクションタイヤの効果 (2019/5/31)
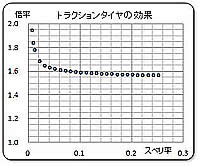 スリップ率の測定にある程度の確信が持てるようになったので、以前からねらっていたトラクション・タイヤの効果を数値化することに挑戦した。
スリップ率の測定にある程度の確信が持てるようになったので、以前からねらっていたトラクション・タイヤの効果を数値化することに挑戦した。- ■ μカーブ特性をまとめる (2019/5/31)
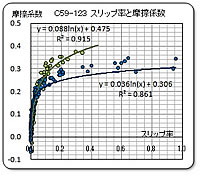 今回はスリップ率のデータをもとに、スリップ率βと摩擦係数の関係を示すμカーブを整理しよう。
今回はスリップ率のデータをもとに、スリップ率βと摩擦係数の関係を示すμカーブを整理しよう。
鉄道模型工学概論 再編集(8)
- ■ 電圧降下について考察する (2019/6/10)
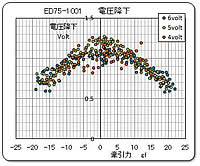 新たに測定可能となったモータ端子電圧の測定データをもとに、電圧降下量が計算できるようになった。 そこで、この電圧降下について考察してみることにしよう。
新たに測定可能となったモータ端子電圧の測定データをもとに、電圧降下量が計算できるようになった。 そこで、この電圧降下について考察してみることにしよう。- ■ クリーニング方法の違いによる影響 (2019/6/11)
 集電機構が異なるTOMIX製の電気機関車で測定を実施したが、この時に余分な操作を行ったために、思ってもみなかった測定結果となってしまった。 この結果をクリーニング方法の違いという視点で再編集を実施した。
集電機構が異なるTOMIX製の電気機関車で測定を実施したが、この時に余分な操作を行ったために、思ってもみなかった測定結果となってしまった。 この結果をクリーニング方法の違いという視点で再編集を実施した。- ■ 電圧降下の時間的変化とLOCOオイルの効果 (2019/6/11)
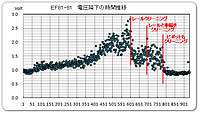 一定の条件で走行させてその時の電圧降下の状態をじっと観察することにする。 また、LOCOオイルを塗布してその効果を観察した。
一定の条件で走行させてその時の電圧降下の状態をじっと観察することにする。 また、LOCOオイルを塗布してその効果を観察した。- ■ 電圧降下の時間的変化 その1 (2019/6/11)
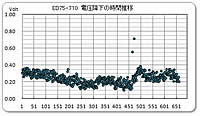 集電機構が異なるTOMIX製の電気機関車でも実験した。 動輪の軸受構造と集電機構が異なるため、異なる結果を期待したのであるが、やっぱり!という結果が得られた。
集電機構が異なるTOMIX製の電気機関車でも実験した。 動輪の軸受構造と集電機構が異なるため、異なる結果を期待したのであるが、やっぱり!という結果が得られた。- ■ 電圧降下の時間的変化 その2 (2019/6/11)
 先回に続き、KATO製の電気機関車に戻って同じ実験を実施することにした。 今回は、手持ちのKATO製の電気機関車の中で、新しいモデルであるEF510-510号機を対象とした。 また、手製のミラクル・グリスの実験も実施してみたが、失敗作であった。
先回に続き、KATO製の電気機関車に戻って同じ実験を実施することにした。 今回は、手持ちのKATO製の電気機関車の中で、新しいモデルであるEF510-510号機を対象とした。 また、手製のミラクル・グリスの実験も実施してみたが、失敗作であった。- ■ 動力車の出力と出力効率 (2019/6/25)
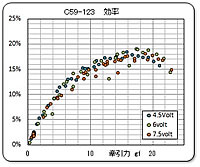 モータの出力とその効率を求め比較してきた。 そこで、このモータを搭載している動力車両についても、車両レベルでその出力と出力効率を検討してみることにした。 そして、多くのNゲージ動力車の出力効率は、10%もいかない事が分かった。 でも、これはあまり意味のない無駄な作業であったと結論つけた。
モータの出力とその効率を求め比較してきた。 そこで、このモータを搭載している動力車両についても、車両レベルでその出力と出力効率を検討してみることにした。 そして、多くのNゲージ動力車の出力効率は、10%もいかない事が分かった。 でも、これはあまり意味のない無駄な作業であったと結論つけた。
鉄道模型工学概論 再編集(9)
****** 第8章 車両モデルでの解析 ***********************
追加した測定項目を生かして、車両の特性を深堀してみよう!
- ■ 特性解析のいきさつと経緯 (2019/6/12)
- 紆余曲折を経て実施されてきた解析作業の経緯を時間軸にそって、その要点を説明しておこう。
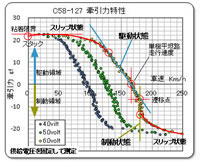
- ■ 制動領域での動力特性 (2019/6/12)
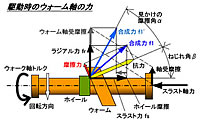
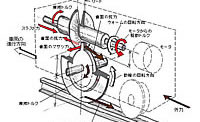 車両のモデル化で一番苦労しているウォームギャのメカニズムに対し、解析のスタートとなった制動領域での挙動と特性の考察について再編集した。
車両のモデル化で一番苦労しているウォームギャのメカニズムに対し、解析のスタートとなった制動領域での挙動と特性の考察について再編集した。- ■ 第1次特性解析 車両の静的特性のモデル化と特性解析 (2019/6/12)
 動力車の動力機構の解析を進めるために車両特性のモデル化を検討しました。 ここでは、線路から供給された電圧と電流、及び、車両の速度と牽引力の4つの測定値から車両特性を推定しようとするものです。
動力車の動力機構の解析を進めるために車両特性のモデル化を検討しました。 ここでは、線路から供給された電圧と電流、及び、車両の速度と牽引力の4つの測定値から車両特性を推定しようとするものです。- ■ 鉄道模型 動力車の調査 目次 (2012/11/1)
- 上記の解析方法を使って解析を実施した電気機関車8両のリストを示す。 しかし、多くの課題があったため、このリストは中断した状態です。 その後、「鉄道模型 動力車の調査」に移行しています。
- ■ 第2次特性解析 追加測定項目を生かした解析を検討する (2019/6/13)
 動力特性の解析を実施す作業を5年半ぶりに再開している。 追加測定項目によって得られたデータを活用して特性解析を実施しよう。
動力特性の解析を実施す作業を5年半ぶりに再開している。 追加測定項目によって得られたデータを活用して特性解析を実施しよう。- ■ 第2次特性解析 追加測定項目を生かしての解析を検討する (続編)
 (2019/6/14)
(2019/6/14)
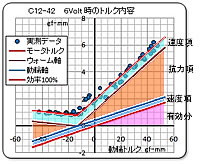
動力車の動力特性はウォームギヤの歯面のねじれ角が大きく寄与していると判断し車両モデルの構成を見直した。 モデル式から計算した特性カーブは、測定データと見事にマッチするようになった。 測定項目追加のための装置開発から始めた工夫と努力の結果であると思うと、苦労が報われたような気がします。- ■ 第3次特性解析 速度項を考慮したした解析 (2019/6/14)
 速度項の再検討のために無負荷状態での特性をさらに突っ込んで解析し、計算モデルを再修正した。 その結果を同様に検証したが、計算結果は嬉しくなるぐらい、ピッタリと合致していることが分かった。
速度項の再検討のために無負荷状態での特性をさらに突っ込んで解析し、計算モデルを再修正した。 その結果を同様に検証したが、計算結果は嬉しくなるぐらい、ピッタリと合致していることが分かった。- やったー!

鉄道模型工学概論 再編集(10)
- ■ 第3.5次特性解析 速度項を考慮したした解析の修正 (2019/6/25)
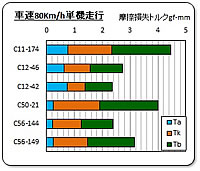
 幾つかの測定データを整理すぬ中で明らかとなった内容を修正することにした。 その内容は、抗力項の考え方を整理することと、動輪軸側の摩擦トルクの式を1次式に近似する式に変更することである。
幾つかの測定データを整理すぬ中で明らかとなった内容を修正することにした。 その内容は、抗力項の考え方を整理することと、動輪軸側の摩擦トルクの式を1次式に近似する式に変更することである。- ■ 解析結果のまとめ コアレスモータを搭載したKATO製のSLシリーズ
 (2019/6/26)
(2019/6/26)
第3.5次特性解析を使って、 KATO製コアレスモータを搭載した蒸気機関車のシリーズを、修正した計算モデルとEXCELの解析シートを使用して解析してきた。 そして、色々な観点からその結果をまとめてみた。- ■ 第4次特性解析 抗力係数に注目して解析する (2019/6/26)
 KATO製コアレスモータを搭載したKATO製のSLシリーズを検討中に、 この方法では摩擦損失の中の抗力項を簡単に求めることが困難であることに気が付いた。 そこで、昔の考え方に振り返って解析方法を再検討することにした。
KATO製コアレスモータを搭載したKATO製のSLシリーズを検討中に、 この方法では摩擦損失の中の抗力項を簡単に求めることが困難であることに気が付いた。 そこで、昔の考え方に振り返って解析方法を再検討することにした。- ■ 第4次特性解析 抗力係数に注目して解析する その2 (2019/6/26)
 KATO製コアレスモータを搭載した蒸気機関車のシリーズについて、今回は第4次特性解析方法にて実施した。
KATO製コアレスモータを搭載した蒸気機関車のシリーズについて、今回は第4次特性解析方法にて実施した。- ■ 特性解析 今後の課題 (2019/6/26)
 今まで、色々工夫しながら楽しんで来たが、測定作業や工作に対する意欲が萎えて来ているのが現状である。 その理由は現在の測定方法についていろいろな反省点と課題が浮かんできているからである。
今まで、色々工夫しながら楽しんで来たが、測定作業や工作に対する意欲が萎えて来ているのが現状である。 その理由は現在の測定方法についていろいろな反省点と課題が浮かんできているからである。

![]()