
HOME >> 鉄道模型工学 第2次特性解析 追加測定項目を生かしての解析を検討する
鉄道模型工学 第2次特性解析 追加測定項目を生かしての解析を検討する
動力特性の解析を実施す作業を5年半ぶりに再開している。 この解析に先立ち、スリップ率データの整理と、KATO製コアレスモータのモデルの定数として活用するためにデータの整理と平均的特性値を求めた。 今回は、これらのデータを活用して特性解析を実施しよう。 対象とする車両は、いよいよ念願の蒸気機関車であり、それもコアレスモータ搭載のKATO製C59-123号機である。
■ KATO製C59-123号機の測定データ
このモデルについては、2016年5月18日に測定を実施しており、最も最新の測定法を駆使して実施されたもののひとつである。 そこで、このデータを使用して特性解析を再開する。 蒸気機関車モデルに対しても初めてであるので期待しよう。
まず、その時の測定データの一部を再掲載する。 参照元はマイコレクションの「C59-123 号機」である。
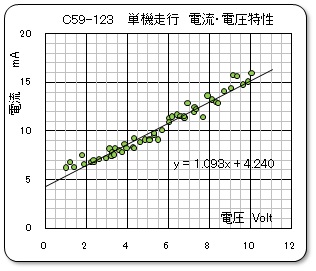
■ 電圧降下の検討
新しい測定方法では、走行中の動力車のモータ端子電圧を直接測定している。 このため、レールの供給されている電圧とモータ端子電圧の差、即ちモデルの集電機構による電圧降下量を計算できるのである。
集電機構による電圧降下量 = レール供給電圧 − モータ端子電圧
で計算しているので、レールから動力車間の往復回路での電圧降下量となる。 この電圧降下は何に影響されているのかをチェックするための、車速、牽引力(=動輪トルク)、電流の各値を横軸にとって電圧降下量をグラフ化したものが下記のグラフである。
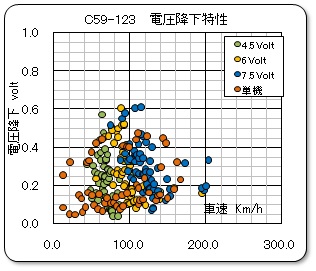
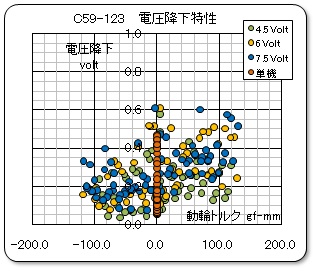
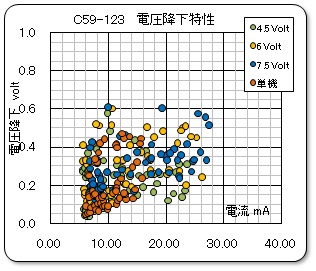
電圧降下量はかなりバラついているが、車速、牽引力、電流とは無関係です! と言わないばかりの散布状態である。 電気機関車や電車で見られた傘型の傾向もないのである。 0.05〜0.6ボルトの範囲でバラバラしているのみで、傾向が特定できなかった。 そして、ほとんどゼロに近い場合があることには驚いている。 これらは、テンダー車での集電に加え、動輪での集電方法の工夫が功を奏しているのかもしれない。 電圧降下量としては、これらの全平均値を取って
電圧降下量 = 0.25 ボルト
と推定することにした。
■ モータ回転数の検証
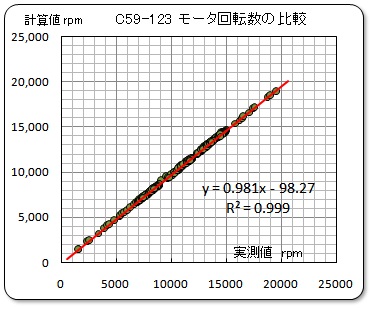
また、新しい測定方法では走行中の動力車のモータ回転数も直接測定している。 このデータについて、モータ端子電圧と電流値からモータモデルを活用して、回転数を検証してみよう。 これは、測定データとモータモデルの確からしさを検証し、電流値から計算できるモータトルクの信頼性を確認するためである。
測定時には照明回路を取り外しているので、モータ電流は供給された電流とイコールであると言えるので、この電流値を使用する。 そして、モータモデルは、先回報告した「KATOのコアレスモータのデーをタ整理」で求めたKATO製コアレスモータの標準定数を使用した。
モータ端子電圧とモータ電流値より、計算した回転数と測定した回転数の比較を右のグラムに示す。 まさにピタリと一致していることが分かる。
■ 車両特性の解析
それでは、「車両の静的特性のモデル化と特性解析」に報告した手法を使って車両の定数を推定して行こう。
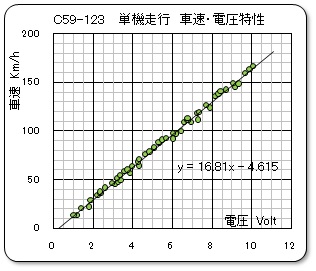
◆ 速度項の推定
この速度の項は、損失トルクを回転数に依存する成分に分離し、その回転数は入力側のモータの回転数 Nm とすることにしている。 そして、モータの出力トルクは、減速機構の摩擦抵抗に食われて、残りのトルクが動輪に伝達される。 しかし、動輪まで伝達されたこの有効なトルクではあるが、単機平坦路走行の時には動輪の駆動力を殆んど必要としていないので、抗力項の影響が少ないはずである。
そこで、上記にて確認されたモータモデルを使用し、この時の電流データからモータの出力トルクを求め、この時のモータ出力トルクを損失トルクとし、 モータ回転数との関係をグラフ化する。 その結果を下左側のグラフに示す。
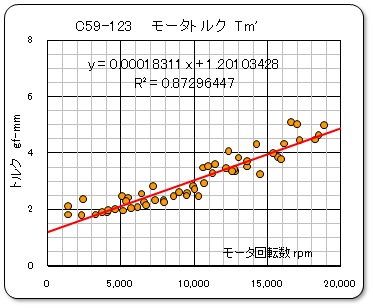
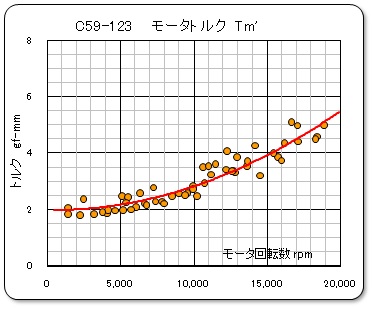
いつもの様に直線近似して、直線近似した時の勾配値を速度項の定数と見なすことにしている。 しかし、測定データを見ていると、どうも弓なりになっているような気がするので、試しに放物線近似を適用してみると何だかこちらの方がピッタリしているようである。 上右側のグラフ。
しかし、回転数を2次変数に変える必要があり、式の修正が必要なので、ここでは直線近似で進めることにする。 今後の課題である。
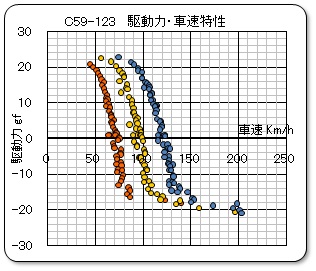
◆ 抗力項の推定
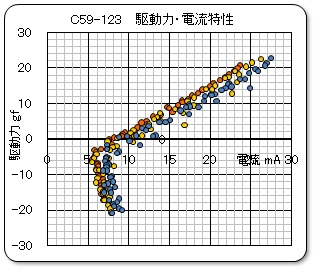
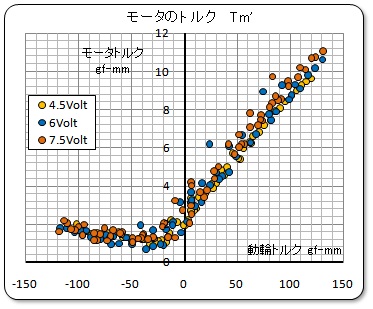
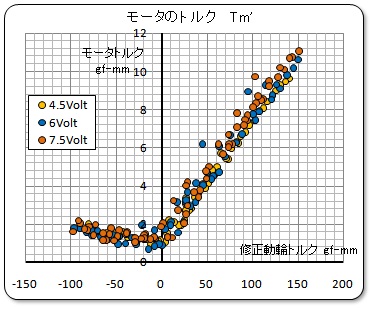
次に、「力の項」としての抗力項について検討する。 まず、計算されたモータトルク Tm' をモータ回転数 Nm の関係でグラフ化してみた。 さらに、動輪トルクを横軸にして作成したものを下に示す。
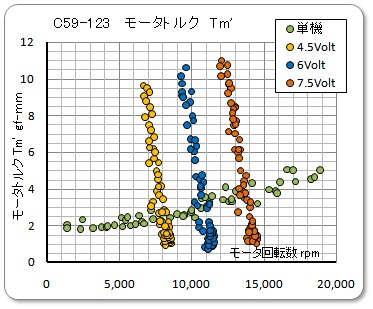
何時も見慣れているグラフであるが、いつもと少し様子がおかしい事に気が付いた。 「鉄道模型 動力車の調査 目次」にてリストアップしたいくつかの解析例と比較して特性の傾向が異なっているいるのだ。
- 上左側のグラフに於いて、牽引力特性データの場合のトルク最小ポイントが、単機走行時のデータと大きくかけ離れていること。
- 動輪トルクとの関係を示す上右側のグラフに於いて、右側、即ち駆動状態の場合と、左側、即ち制動状態では、勾配が大きく違っており、かつ供給電圧による差が少ないこと。
これは何を意味するのだろうかと考えてみた。 そして、遷移点と2条ネジであることが関係することに気が付いた。
◆ 遷移点について
ここで、自分が命名した「遷移点」について思い出してみよう。 この遷移点とは 「制動領域での動力特性」にて考察したものであるが、ウォームギヤに掛かる力が逆転するポイントである。
そして、丁度その時点では、ウォームとホイールはフリーになっており、接触していない可能性があるのである。 制動力と作用している動輪系の摩擦力と動輪に掛かる外からのトルクが釣り合ったおり、ウォームとは切り離された状態である。 そして、ウォームは自分自身の摩擦トルクだけと釣り合ったおり、ホイールとの関係がこれまた切断された状態なのである。 勿論、その状態は一瞬の現象かも知れないが、そしてこれは、注目に値する現象であることに気が付いたのである。
即ち、この遷移点でのウォームとホイールに関するトルクは、それぞれ独立しており、そしてその値は、それぞの摩擦トルクを暗示しているのである。
まず、ホイール側に注目しよう。 ホイールと動輪はアイドラギヤなどで直接結合されているので、減速ギヤ比を考慮しておけば、動輪軸と同等と考えれば良い。 そこで、この遷移点が発生している動輪トルクに注目して、その時の動輪トルク分をゼロ点まで移動させたものを右に示す。 移動させたものを修正動輪トルクと呼ぶことにしよう。
ここで、このC59-123号機の減速機構を振り返ってみよう。
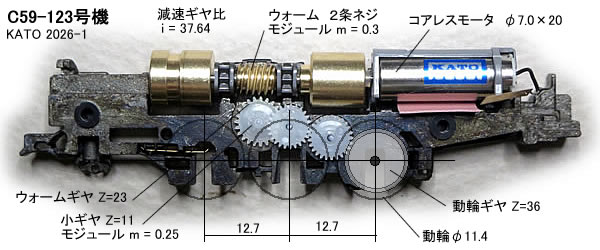
左に、その構成をイラストで示す。 ホイール、即ち、左のイラストではウォームギヤと読んでいるが、名称不統一で申し訳ない!
このホイールと動輪との間の減速ギヤ機構は、洗練された機構で構成されおり、大きな摩擦喪失を生む構成ではない。 しかし、動輪には、SL の本命といえるサイドロッド類のリンク機構が連結されており、この動きが摩擦抵抗となっていると考える事が出来る。
このC59-123号機の場合の摩擦トルクは、4.5、6.0、7.5 vol t時の折れ曲がり点の動輪トルクより、-27.8、-20.9、-14.0 と読み取り、その平均として、-20.9gf-mm とした。 動輪の駆動力に換算すると、3.7 グラムに相当する。
次に、ウォーム軸側のトルクを計算しよう。 ここで上に示したグラフを各電圧パラメータ毎に分けて表示し、データを直線近似させたものを下に示す。 縦軸は少し拡大してゼロ点付近の様子が観察できるように配慮した。
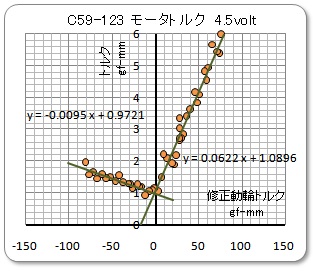
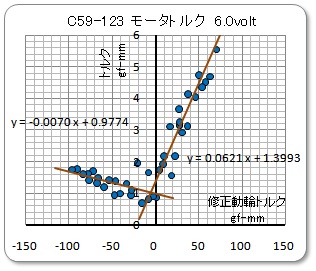
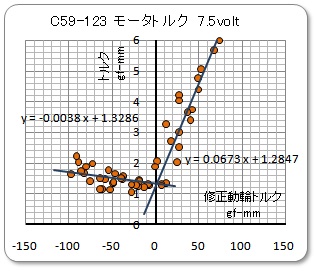
右と左の直線部分が綺麗に交差している上に、その勾配がかなり異なっていることもはっきりと理解できる。
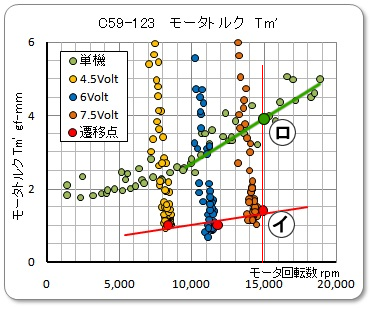
そこで、その交点のY座標を読み取ると、1.0、1.0、1.4 gf-mm と読み取れる。 そしてその平均は、1.1 gf-mm となる。 また、元のデータよりこの時の回転数を読み取って、これを遷移点の値としてプロットしたのが右のフラフである。 このグラフから何を感じますか?
- 遷移点で示されたプロット点は、回転数によってどのように変化するのだろうか?
これは、車両に組み込まれた状態でのウォーム軸の無負荷状態での摩擦トルクを示しているので、回転速度がどのように影響しているのかを知る事ができるのである。 - 無負荷走行時のデータと何が違うのであろうか? その差は何を意味しているのだろうか?
右のグラフに示す(イ)点はウォーム軸がフリーの状態で、同じ回転数の(ロ)の点が、無負荷走行時のモータトルク、即ちウォーム軸トルクである。
まず、(2)の疑問点について、無負荷走行時には、牽引力はゼロと言えども、動輪周りの負荷が掛かっているはずである。 即ち、伝達機構部は駆動状態にあるのでウォーム軸はフリーでは無いのだ。 そしてその時の負荷は、上記で求めた平均値としてのして、20.9gf-mm だろうか?
(ロ)と(イ)のトルク差は、およそ 3 gf-mm だから、ウォームギヤの効率を20%と仮定すると、3 * 37.64 * 0.2 = 22.6 となり合ってくるのだ。 本当かな?
次に、(1)の疑問に対して、速度項の影響は無視できないのではないかと考えている。 これは、実験で確かめる必要がありそうだ。 方法としては、ホイールを外した状態でモータを回し、その時の回転数とモータ電流を測定すれば良いはずである。 また、牽引力特性の測定に対しては、負荷状態を一定にして、電圧を変えて測定することも面白い結果が出てくるかもしれない。 今までは使用状態を考慮して、供給電圧が一定の時の特性を測定していたが、、逆に、負荷状態が一定の場合の特性を見てみようとするものである。 これは、速度項の影響が何処にどう表れるかを探るきっかけになるのではと考えているからである。
期待するグラフとして、右上のグラフの単機走行時のようなカーブをいくつも描いてみようと思っている。 グラフは負荷に応じて平行移動しているだけなのか、あるいは、何故だか末広がりに開いていくのか、あるいは予想外の傾向を示すかも知れないのである。
◆ 駆動側と制動側の勾配の違いについて
モータトルクと動輪トルクの関係を示したグラフにおいて、右側の駆動状態と左側の制動状態では、入出力勾配が大きく違っているのもこのモデルの特徴なのである。 これは、「制動領域での動力特性」にて考察したように、ウォームギヤの歯面のねじれ角に起因するものと判断している。 KATOの技術陣の苦労話しでも紹介されていたように、2条ウォームの採用が関係しているのである。
このウォームギヤの関係をモデル化することによって、左右の勾配の違いを解析できる筈であるが、そのためには、今まで進めてきた車両モデルの構成を見直す必要があるのだ。
************ C59号機のデータを使っての解析検討 (2018/5/15) を再編集 ********
■ ウォームギヤの噛合い状態
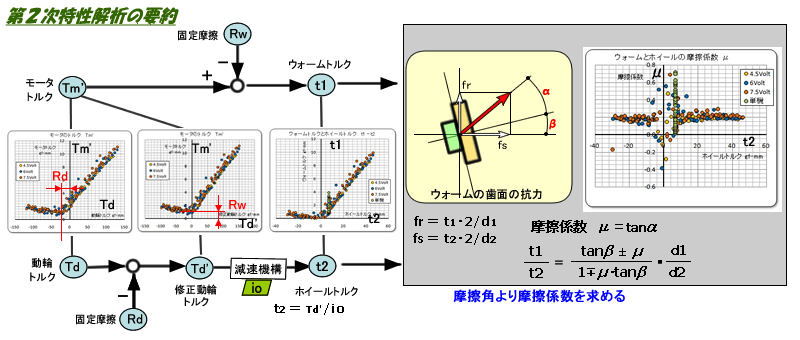
上記のの報告で、動力特性はウォームギヤの歯面のねじれ角が大きく寄与していることが予想された。 このため、このウォームギヤの関係をモデル化することによって、駆動状態と制動状態でのモータトルクと動輪トルクの特性勾配の差異などを解析できると踏んでいる。 そこで、今まで進めてきた車両モデルの構成を見直し、新たにウォームギヤの歯面に注目したモデル化試みた。
まず、ウォームギヤの噛合い状態を考えてみよう。 これは「制動領域での動力特性」で検討しているが、数式を使用したモデル化までは実施していなかったので、今回挑戦することにした。
まず、関係する項目を整理するために、簡単化したイラストで噛合い状態を表現した。
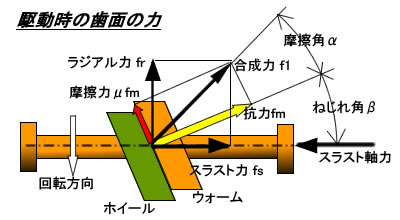
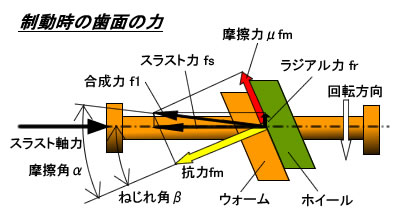
駆動時と制動時では、ウォームギヤの歯面に掛かる力は逆転している。 そこでこの時のウォーム側が受ける力に注目してその力関係を上記の様に表示してみた。 かのニュートンの大法則 F = mα で示された様に、その物体が受けている力関係を整理する事は、力学の基本中の基本なのだ。 なお、ウォームの軸受けから受ける力(ラジアル力)とモーターから受けるトルクについては、省略している。
歯面に直角に働く抗力 fm のよって、摩擦力 μ・fm が生じる。 この両者の関係は摩擦角αとして表現されている。
![]()
この関係は、駆動時でも制動時でも同じであり、抗力 fm と摩擦力 μ・fm の合力を合成力 f1 とする。 この合成力 f1 をウォーム軸方向のスラスト力 fs とラジアル方向のラジアル力 fr に分解する。 ここでねじれ角をβとすると、
駆動時: ![]() 制動時:
制動時:![]()
ここで示したスラスト力 fs は、ホイールにも反作用として働き、それはホイールトルクと作用するし、また、ラジアル力 fr は、ウォームのトルクとなり、モータから作用するモータトルクと釣り合うことになる。
図からも分かるように、駆動時と制動時を比較して、同じスラスト力 fs であったとしても、 ラジアル力 fr は異なってくるのが明白である。 そしてその差は、ねじれ角βによるものである。 そして、 ラジアル力 fr と スラスト力 fs の関係は、
駆動時: ![]() 制動時:
制動時:![]()
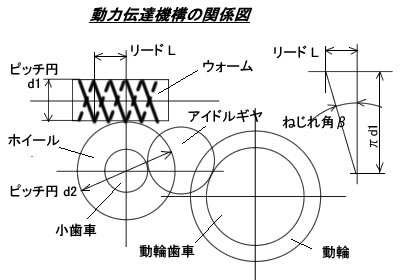
ここで、動力伝達機構の関係を見ておこう。 右にイラストを示す。 まず、ウォームのねじれ角を求めておこう。 ねじれ角はリード角とも呼ばれているが、ねじれ角をα、ウォームのピッチ円直径を d1 、リードを L とすると、
tanβ = L / πd1
となる。 ここで、リード L は、ウォームが一回転する間に歯が進む量を示し、2条ネジの場合は、歯のピッチの2倍となるのだ。
ここで注意しておくことは、例え、2条ネジあるいは3条ネジにしたとしても、それに応じてピッチ円を大きくしてしまえば、なじれ角は大きくならないのである。 ウォームギヤの逆効率を上げるには、2条ネジあるいは3条ネジにする事ではなくて、なじれ角を大きくするのが重要なのである。
この件に関して、何時も愛読しているブログ ”Giants of the West” の著者は嘆いておられた。 2017年12月29日の「続 困った3条ウォームギヤ」で述べられている。
ウォーム歯面で発生しているラジアル力 fr や スラスト力 fs はピッチ円上で作用していると考えられるので、この力を、ウォームトルク t1 とホイールトルク t2 に換算するとすると、
t1 = fr ・d1/2 t2 = fs ・d2/2
となる。 これらの関係式を整理すると次のようにまとめる事ができる。
![]()
また、摩擦力に関してはまだよくわからないので単純に固定項だけを考える事にしておきます。
そこで、 ウォーム軸の固定摩擦を Rw とすると、モータトルク Tm' との関係は、
t1 = Tm' - Rw
となる。 また、動輪トルク Td に対して動輪周りの摩擦トルク Rd を加味した値を修正動輪トルク Td' とすると、
Td' = Td + Rd
となり、さらに、ホイールと動輪間の減速ギヤ比を i0 とすると、
t2 = Td' / i0
となる。
さらに、この Rw と Rd の値は、遷移点に注目すれば計算できるのである。
ここで、先回のモデルでははっきりしていなかった自分自身の車体重さの勾配に対する影響を、車両要因から環境要因として分離しておくことにした。 即ち、カプラーに掛かる牽引力 Fk から勾配要因である Wosinθを分離して、有効駆動力 F2 とすると、
Fk = F2 - Wosiniθ
F2 = F1 - R2
となる。 ここで、R2 はテンダー車や従台車などの動輪以外の車輪の摩擦力を示す。
これらの一連の関係を、「車両の静的特性のモデル化と特性解析」で示したブロック図を修正して下に示す。 この拡大図。
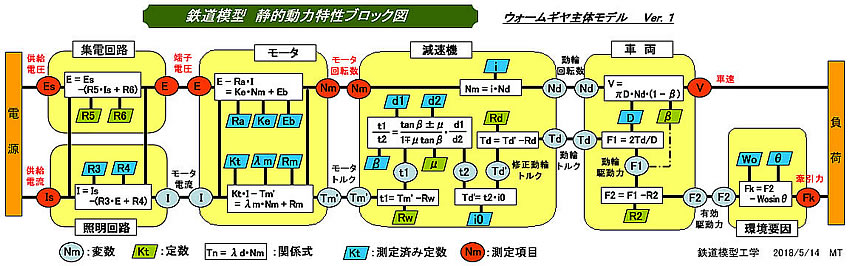
ここで赤色で埋めた変数は、動力特性の測定中に測定可能な変数を示している。 また、青色で埋めた定数は、分解調査や単独テストで測定可能な定数を示す。
そして、この原稿を記述中に大ポカに気が付いた。 ねじれ角βとスリップ率βの記号が重複しているのだ!
・・・・・・・・・#$%&<>)%$#\\:;?\/・・・・・・・・・・・・
************ 新解析法の検討 (2018/5/16) を再編集 ********