
HOME >> 鉄道模型工学 > KATOのコアレスモータのデーをタ整理
モータ特性の測定とモデル化 KATOのコアレスモータのデーをタ整理
モータ定数を推定するExcelの計算シートを使って、モータを構成する6個の定数を推定することが出来き、、その定数を比較することにより各モデルの違いを検討した。 今回は蒸気機関車用モータの本命と目されるKATO製のコアレスモータについて、このモデルを表す定数として活用するため、その特性の平均値を求めてみよう。

■ KATO製コアレスモータ
KATO Nゲージ生誕50周年記念誌によると、1969年に開発されたFM-5 から、2010年に開発されたコアレスモータまで40年間にわたってモータの小型化に取り組んできた最新技術の結晶であるとのこと。
このコアレスモータは、蒸気機関車のボイラ内へ収納できる小型化と、必要な牽引力を発揮できるパワーを備えたモータとして開発されている。 本体はφ7.0mm の丸型で長さは20mm である。
その性能については「負荷反力式測定装置の開発」で測定し、「モータ定数の推定方法」に示した解析法を使って、トルク定数とか逆起電力定数などのモータ特性を表す必要な定数を推定して来た。 その結果を「特性解析のまとめ」にて一覧表にしている。
この一覧表の中から、KATO製コアレスモータの部分を取り出して下に再掲載する。
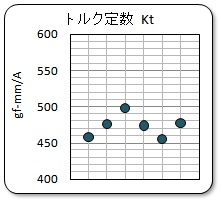
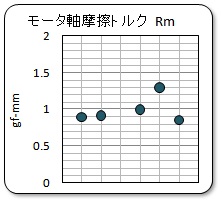
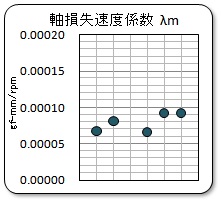
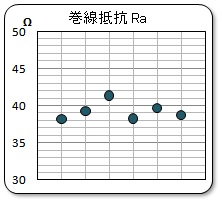
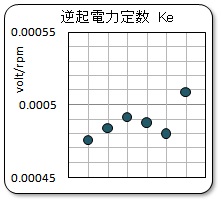
| 搭載モデル | トルク定数 Kt | 軸摩擦トルク Rm | 軸損失速度係数 λm | 巻線抵抗 Ra | 逆起電力定数 Ke | ブラシ部電圧降下 Eb |
|---|---|---|---|---|---|---|
| gf-mm/A | gf-mm | gf-mm/rpm | Ω | volt/rpm | volt | |
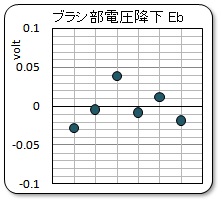
| C59-123 | 457.6 | 0.89 | 0.00006675 | 38.1 | 0.0004757 | -0.029 |
| C56-149 | 475.3 | 0.91 | 0.00008101 | 39.2 | 0.0004840 | -0.005 |
| C56-144 | 497.3 | ( -0.23 ) | ( 0.00013470 ) | 41.3 | 0.0004913 | 0.038 |
| C57-195 | 473.4 | 0.99 | 0.00006590 | 38.2 | 0.0004876 | -0.009 |
| C62-2B | 455.0 | 1.29 | 0.00009215 | 39.6 | 0.0004800 | 0.011 |
| D51-498A | 476.6 | 0.85 | 0.00009210 | 38.7 | 0.0005084 | -0.019 |
| 平均値 | 472.5 | 0.99 | 0.0000796 | 39.2 | 0.0004878 | 0.0 |
標準偏差 |
14.0 | 0.16 | 0.0000116 | 1.1 | 0.00001047 | --- |
| 標準偏差/平均値 | 2.95 % | 16.3 % | 14.5 % | 2.75 % | 2.15 % | --- |
表中に黄色で示した C56-144 号機の一部の項目は、測定データに疑問があったので、平均や標準偏差の計算から除外している。 また、ブラシ部電圧降下の平均値は、-0.002 であったが、電圧降下がマイナスになる事はあり得ないので、平均値はゼロと解釈した。
各定数についてグラフでも示しておこう。
この平均値をKATO製コアレスモータの標準定数とすることにしよう。
| KATO製コアレスモータの標準定数 | |||||
|---|---|---|---|---|---|
| Kt | Rm | λm | Ra | Ke | Eb |
| gf-mm/A | gf-mm | gf-mm/rpm | Ω | volt/rpm | volt |
472.5 |
0.99 |
0.0000796 |
39.2 |
0.0004878 |
0.0 |
そして、この定数を使って計算した特性値を測定データと比較してみる。 対象はC59-123号機とした。 測定値データと推定したモータ定数での計算値は、上記のC59-123 のページを参照してください。 標準定数を使った計算データでのグラフを下に示す。 赤線は計算値を示す。
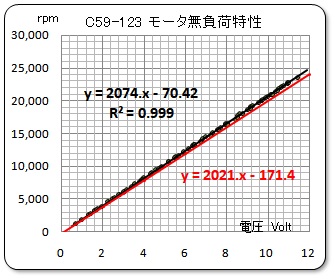
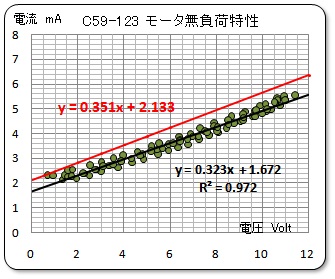

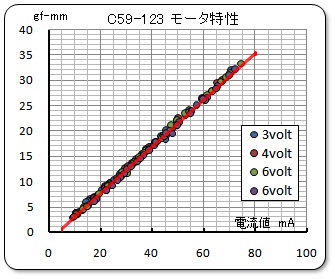
測定データから直接求めた定数での計算結果の方が、実際の測定データによりマッチしているのは当然かもしれない。 標準定数を使用するとどうしてもスレが生じてしまうのは仕方がない事である。 しかし、KATO製のコアレスモータは、上のグラフや標準偏差値から判断して、その品質が安定していると思われる。 このため、モデル毎にモータを取り出して、モータ単体での特性を測定しなくてもこの標準定数を使用すれば、計算上から各変数を容易に推定出来る事に注目したい。
特に電流値からモータトルクを推定出来ることは、車両特性を解析する上で非常に有効な手段なのである。 モータのモデル化を進めたのもこのためであるが、標準定数が有効であれば、モータそのものの測定も省略できるのである。
なお、コアレスモータの無負荷時のデータを見ていると、どのデータも電流特性が少し弓なりになっているのが気がかりである。 これは無負荷時の電流、即ち空転時のモータ損失トルクが速度の2乗に比例している項目があるのではないかと疑っている。 でも、まだ直線近似で対応できる範囲であると判断している。
■ 余談: “5極モータ” と “2極5スロット”
「KATO Nゲージ生誕50周年記念誌」を読んでいて、あれー?と思った。 102ページの用語解説の中に、モーターの極数は “モーターの中にできる磁極の数で、コイルが巻かれている溝の数に対応する。” と記述されている。 自分が参考にした赤津先生の著作本では、溝の数はスロット数で表し、極数は外側の磁石の極数を示すと説明したあった。 このため、KATOのGM-5 モータの場合は、“5極モータ” ではなくて “2極5スロット” モータと呼ぶべきかなと思っていたのだ。
ネットなどの他の資料では、極数というのはモータの固定子に作られる「磁極 ( N極, S極 ) の数」を表し、磁極は必ずN極とS極の2つで1対(1組)となる仕組みと説明されてあり、自分では偶数で表記されるものと理解していた。 このため奇数の極数はないはずなのだ・・・・・・・・・と思っていたのだ。
KATOさんで使われている呼び方をすると、外側の磁石の極数はどう表すのだろうか。 4極や6極モータの場合は想定外なのだろうか。 外側は2極に決まっている訳ではないし。
この分野では、用語が統一されておらず、長い歴史の中で、それぞれの派閥争いがあるのではと想像する。
************ KATOのコアレスモータのデーをタ整理 (2018/5/13) を再編集 ********