
HOME >> 鉄道模型工学 > モータ特性の測定とモデル化 特性解析のまとめ
モータ特性の測定とモデル化 特性解析のまとめ
モータ定数を推定するExcelの計算シートを使って、モータを構成する6個の定数を推定することが出来た。 その推定データを比較して、各モデルの違いなどを検討してみよう。
■ 推定計算したモータ特性の結果一覧
推定した結果を下の一覧表に示す。 ここでは、定数の推定値に加えて、特性を特徴付ける勾配値についても比較した。
| グループ | No. | 搭載モデル | 定数の推定値 | 特性線の勾配 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Kt | Rm | λm | Ra | Ke | Eb | Nm-E | I-E | Tm'-Nm | Tm'-I | |||
| KATO 第3初期 | 1 | EF81-119 | 236.2 | 15.76 | 0.00047788 | 9.45 | 0.00025751 | 0.313 | 3615 | 0.007314 | -0.006914 | 253.7 |
| KATO 第3中期 | 2 | EF65-511 | 220.1 | 22.1 | -0.0000874 | 11.6 | 0.00025691 | 0.252 | 3963 | -0.001574 | -0.004787 | 216.2 |
| 3 | EF65-1097 | 250.56 | 16.95 | 0.00044406 | 11.8 | 0.00027179 | 0.085 | 3416 | 0.006055 | -0.006215 | 269.8 | |
| 4 | EF81-81 | 260.1 | 34.6 | -0.0006791 | 11.6 | 0.00026968 | 0.193 | 4177 | -0.010906 | -0.005368 | 230.9 | |
| 5 | EF510-1 | 230.0 | 18.0 | 0.0003000 | 10.0 | 0.00024784 | 0.074 | 3833 | 0.005000 | -0.006000 | 242.1 | |
| 6 | ジャンク3 | 240.5 | 8.2 | 0.0004695 | 12.5 | 0.00025000 | 0.000 | 3644 | 0.007115 | -0.005280 | 264.0 | |
| KATO 第3後期 | 7 | EF65-1124 | 228.7 | 29.3 | -0.0004289 | 10.0 | 0.00025210 | 0.766 | 4285 | -0.008036 | -0.005337 | 211.7 |
| 8 | EF58-60 | 239.3 | 17.8 | 0.0001588 | 14.4 | 0.00029054 | -0.313 | 3332 | 0.002211 | -0.004987 | 247.2 | |
| 9 | ED79-11 | 244.9 | 12.1 | 0.00015049 | 11.8 | 0.00031683 | -0.454 | 3086 | 0.001896 | -0.006726 | 250.5 | |
| 10 | EF64-1032 | 275.8 | 15.8 | 0.0002115 | 14.5 | 0.00027322 | 0.154 | 3517 | 0.002697 | -0.005408 | 287.0 | |
| 11 | DE50-44 | 269.1 | 18.01 | 0.00032882 | 12.2 | 0.00027193 | -0.067 | 3486 | 0.004260 | -0.006327 | 283.9 | |
| 12 | ジャンク1 | 245.5 | 17.1 | 0.0002287 | 12.0 | 0.00026374 | 0.478 | 3637 | 0.003389 | -0.005624 | 255.9 | |
| 13 | ジャンク2 | 235.0 | 13.9 | 0.0001748 | 12.5 | 0.00027420 | 0.078 | 3527 | 0.002624 | -0.005330 | 243.0 | |
| KATO 第4期 | 14 | EF15-79 | 442.5 | 17.0 | 0.0006967 | 25.3 | 0.00042837 | 0.286 | 2136 | 0.003363 | -0.008189 | 483.6 |
| 15 | EF510-510 | 412.7 | 14.5 | 0.0002761 | 18.8 | 0.00042108 | 0.559 | 2306 | 0.001543 | -0.009520 | 425.0 | |
| 16 | EF65-1103 | 438.8 | 17.2 | 0.0002858 | 23.0 | 0.00042456 | 0.475 | 2275 | 0.001482 | -0.008386 | 454.3 | |
| 17 | EF57-8 | 389.2 | 13.2 | 0.0003634 | 21.4 | 0.00046139 | 0.370 | 2077 | 0.001940 | -0.008755 | 406.1 | |
| TOMIX | 18 | EF510-4 | 283.9 | 15.18 | 8.1471E-05 | 12.4 | 0.00035220 | 0.271 | 2811 | 0.000807 | -0.008145 | 286.8 |
| 19 | ED75-710 | 332.6 | 18.02 | 0.00051985 | 10.3 | 0.00033143 | -0.074 | 2877 | 0.004497 | -0.011222 | 348.8 | |
| 20 | EF210-109 | 277.6 | 11.73 | 0.00071517 | 10.4 | 0.00030186 | -0.121 | 3043 | 0.007839 | -0.008772 | 302.2 | |
| KATO コアレス | 21 | C59-123 | 457.6 | 0.889 | 0.00006675 | 38.1 | 0.00047570 | -0.029 | 2078 | 0.000303 | -0.005780 | 462.9 |
| 22 | C56-149 | 475.3 | 0.908 | 0.00008101 | 39.2 | 0.00048400 | -0.005 | 2038 | 0.000347 | -0.005950 | 481.9 | |
| 23 | C56-144 | 497.3 | -0.228 | 0.0001347 | 41.3 | 0.0004913 | 0.03825 | 1990 | 0.000539 | -0.006050 | 508.6 | |
| 24 | C57-195 | 473.4 | 0.992 | 0.0000659 | 38.2 | 0.00048760 | -0.009 | 2029 | 0.000282 | -0.006109 | 478.6 | |
| 25 | C62-2B | 455 | 1.294 | 0.00009215 | 39.6 | 0.00048000 | 0.011 | 2049 | 0.000415 | -0.005607 | 462.6 | |
| 26 | D51-498A | 476.6 | 0.848 | 0.0000921 | 38.7 | 0.00050840 | -0.019 | 1938 | 0.000375 | -0.006353 | 483.6 | |
| KATO Bトレ | 27 | Bトレ-1 | 332.5 | 3.02447 | 0.00013282 | 48.7 | 0.00036774 | -0.103 | 2583 | 0.001032 | -0.002644 | 350.1 |
| 28 | Bトレ-2 | 331.7 | 3.19394 | 0.00018382 | 48.0 | 0.00035862 | -0.069 | 2596 | 0.001439 | -0.002662 | 356.3 | |
 .
.
各定数の単位は、グラフ表示の値と県連付けている。
Kt: gf-mm/A、 Ke: volt/rpm、 Rm: gf-mm、 λm: gf-mm/rpm、 Ra:Ω、 Eb: volt
数値だけでは良くわからないのでグラフ化した。 グラフの横軸は個別のモータを示す No. である。 そしてプロット点の色は右二示す分類で統一しています。
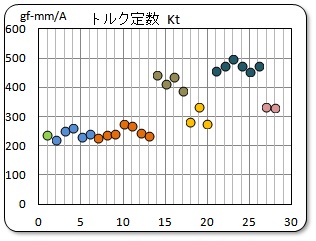
◆ 機械系の定数
まず、機械系の定数から見てみよう。 データがバラツイている項目もあるが、なんとかモデル毎の特徴を考えてみよう。
トルク定数については、KATO製の第4期の小型化されたシリーズでは従来のものより、およそ2倍の設定となっている。 同じ電流に対して2倍の力が出ることを意味しているが、強力な磁石を採用した結果なのだろうか。 そしてコアレスモータについてはそれ以上の力をだしている。 小型ながらトルクは強力であることを示している。 TOMIX製はKATOの3期と4期の間ぐらいに設定されており、Bトレモータもこれと同程度の値に設定されている。
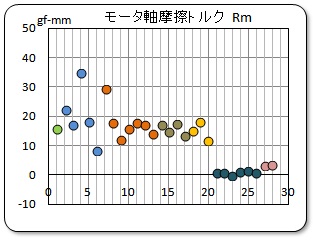
摩擦損失については、その固定値である摩擦トルクが、ほぼ、10〜20 gf-mm の一定値を示しているが、これは 同じような構造を採用している為と考察する。 それにしても摩擦って大きいのだ! その中で、コアレスモータだけはほとんどゼロに近い。 これは構造が違うこと、特に鉄心を使用していないことにようるものであろうか。 Bトレモータは、このコアレスに近い値に抑えているのは注目される。 何か構造的な工夫がされているのだろうか。
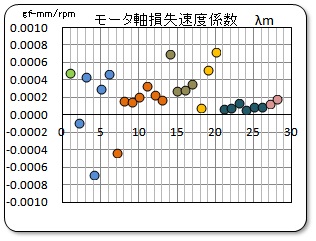
速度係数については、右上がりを示す +0.0002 〜 +0.0004 を示すが、幾つかのモデルではマイナスの値を示している。 これは、測定値を見ても分かるように不思議な現象である。 原因はよく分からない。 通常は速度が上がると摩擦が増えてくると思っているのだが・・・・・・・。 そしてコアレスモータについては、これもゼロに近く、変化が少ないが、絶対値そのものが小さい事によるのかもしれない。
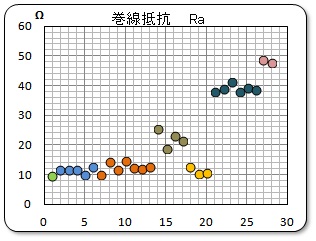
◆電気系の定数
次に、電気系の定数を見てみよう。 巻線抵抗は、トルク定数と同様な傾向を示しており、一般的には 10〜15 Ωの値の様であるが、KATOの第4期の小型シリーズでは従来製のものより、およそ2倍の設定となっている。 しかし、コアレスモータについては、さらに巻線抵抗が高くなっている。 これもコアレスのの特徴であろうか。 また、Bトレ用モータではさらに上を行って、およそ 50 Ωと高い値である。
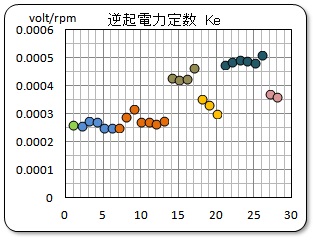
逆起電力定数も、同様な傾向であるが、Bトレ用モータではそれ程アップさせていない。 モータ設計に関して、小生は全くの門外漢であるため、巻線太さや巻き数、磁界の強さなど、何をどうすればこのようになるのか特徴となるのか全く分かりません。 ただ、モータによっては大きく異なっている事を知っておこう。
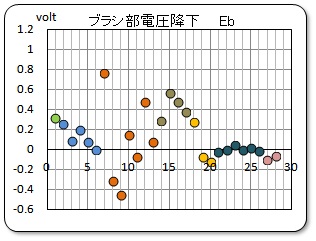
ブラシ部の電圧降下は、推定方法の誤差によってあり得ないマイナスの値も示すものがある。 従ってこの解析データはあまりあてにはならないが 0.5 ボルト以下であるようである。 コアレスモータは、殆どゼロとみてよいであろうが、ブラシ部分の構造が異なるのであろうか。 この項目は無視しても良い要素なのかも知れない。
こうやって、いろいろなモータの定数を並べてみると、大まかな傾向が掴めてきた。
■ 特性としての比較
モータを実際に使用する場合、モータ特性を構成する6個の定数を見ても、素人には 「それでなあに?」 と言った漠然とした状態でしか理解できない。 そこで、実際にモータの特性として表れる、回転数特性やトルク特性を見て置くほうが理解しやすい。
しかし、モータとしての回転数特性やトルク特性は、「モータ特性のモデル化」でも述べたように、モータ特性を構成する6個の定数がに複雑に影響しあっているので、これらの特性上ではどのように比較できるのか検討してみた。
その比較方法として、モータとしての4個の特性は殆ど線形を示しているので、勾配と X または Y 切片の値を取り出して比較した。
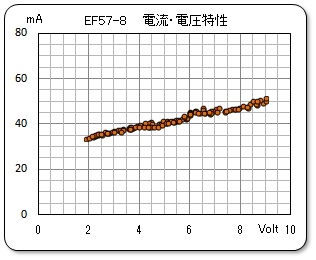
◆ 無負荷特性(回転数特性)の回転数と電圧の関係
まず、回転数-電圧のグラフの一例として、EF57-8号機のグラフを下に示す。 そして、この様なグラフで表示される勾配と X 切片について、各モータ毎に計算して計算値をその右側に示す。
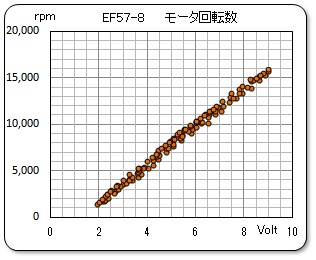
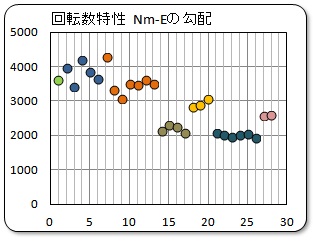
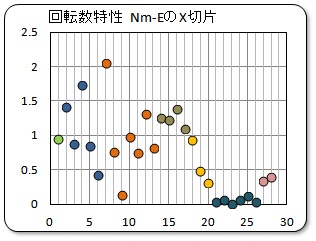
この勾配のグラフは、コントローラのダイヤルの回し具合によるモータの回転数の様子を示している。 また、右の X 切片のグラフは立ち上がりの電圧を示す。 ただし、この立ち上がりの電圧は、一番左のグラフで示される特性のスタートポイントを単に示すものであり、静止状態からの立ち上がり電圧ではないので誤解の無いように。 静止状態からの実際のスタートでは、マグネットの力によって回転が阻止されているが、その力に打ち勝つと、初めてこの特性ライン上に乗ってくるのである。
勾配を示すグラフより、やはり KATO製の第4期の小型化されたシリーズは、それ以前のモデルよりも、その勾配値が小さくなるように設計されている。 この値が小さい事は、コントローラのダイヤルを同じ様に回しても、回転速度の上昇具合が少ない事を示している。 即ち、のんびり屋のモータと言えよう。 コアレスモータについても第4期の小型モータシリーズと同程度であり、のんびり屋の仲間である。、
また、スタートポイントは大体1ボルト前後となっているが、古いモデルは個体差が大きい様である。 しかし、コアレスモータについてはゼロスタートに近い。
なお、重ねて申しますが、これはモータの特性であって、車両の特性ではないのです。 車両には、減速ギヤ比と動輪直径が関与して車速として現れますので、くれぐれも誤解の無いようにしてください。
◆無負荷特性(回転数特性)の電流と電圧の関係
次に、電流-電圧のグラフの例と、このグラフの勾配と Y 切片を計算したものを下に示す。
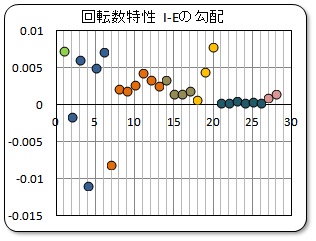
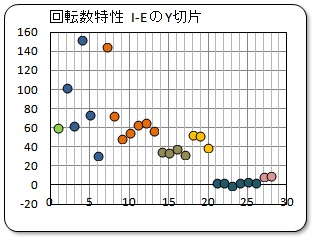
この勾配は、上記のモータ軸損失速度係数のλm と同じパターンを示しているので、 λmの影響比率が大きい事を示唆している。 また Y 切片は、電圧がゼロなのに電流が必要であるとの不思議な現象であるが、これも軸の摩擦抵抗に打ち勝って回転するためのエネルギーが必要であることを示していると考えている。
Y 切片も小さく、勾配も小さい第4期のモータは、電流値が小さく、そして一定していることを示している。 コアレスモータについては、消費電流の絶対値が小さいため、勾配やY切片もほとんどゼロに近い。 Bトレ用モータは、これもコアレスモータに近い特性を示している。
◆ トルク特性のトルクと回転数の関係
モータの出力トルクと回転数を示すグラフの例と、このグラフの勾配を計算したものを下に示す。 このトルクのグラフは、電圧をパラメータにして表示しているが、X 切片の切り出しはパラメータ毎に変化するので比較検討を保留している。 さらに、X 切片の値とは、すなわち負荷がゼロの場合なので上記の無負荷回転時のデータと同じ事であるため、あえて重複をさけている。
勾配については、パラメータの値が違っても原理的には平行移動するはずなので、ここでは勾配だけを検討した。
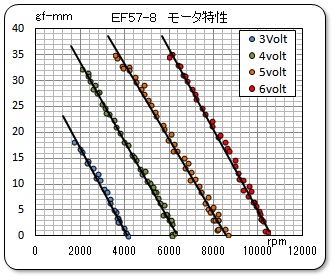
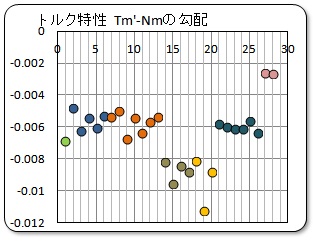
この勾配は、負荷が大きくなった場合の回転数の落ち込み程度を示すもので、マイナスの勾配となる。 そしてその絶対値が大きいモータは、その傾斜が立っている、すなわち負荷に対して回転数の変化の少ない、強い体格のモータを示している。 KATO製の第4期のモータは小型化されたものの、モータの体格としては強くなっているのが分かる。 TONIX製のモータについてもカンモータを採用しているが、小型であるものの体格としては強いのは、強力な磁石を使用しているためだろうか。
コアレスモータについては元のシリーズのレベルの戻っているが、コアレスの小型化を生かすためにバランスを取った仕様にしたのであろうか。 あるいは、減速ギヤ比との兼ね合いで元に戻したのだろうか。 Bトレ用モータは、小さなモータであるために体格的には無理が効かないので、このTm'-Nm の勾配は、その絶対値が小さくなっている。 負荷に対する回転すの落ち込みが大きいのである。
◆ トルク特性のトルクと電流の関係
次に、出力トルクと電流値を示すグラフの例と、このグラフの勾配を計算したものを下に示す。
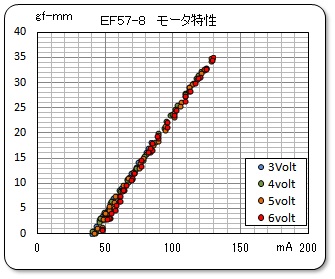
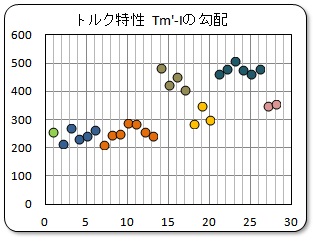
この勾配は、同じ電流変化でどれだけのトルクが出せるかを示しているが、KATO製の第4期のモータは大きなトルクを発揮していることを示している。 コアレスモータもこのレベルを保っており、小型強力モータの特徴を示している。 Bトレ用モータはTOMIXと同じあたりであった。
なお、入力された電流に対してどれだけトルクを発揮できるかを見ようとすること、すなわち効率を考える場合には、トルクゼロの時の無効電流を考慮する必要があるので、その比較は単純にはいかないのだ。
■ まとめ
今回は、モータ毎に測定したデータを使用して特性解析を実施し、その結果より各グループの特徴を見出そうと試みた。 その結果を次に示す。
- フライホイール付きのモデルが登場したKATO 製電気機関車の第3期のモデルは、整流子の構造が古い形態の初期と、形状変更した中期、およびどこかを改良したと思われる青いマーキングのある後期と、三つに分類して比較したが、定数からはその違いを判読することが出来なかった。 巻線などの仕様はそのまま踏襲したようである。
- KATOの小型化した第4期のモータは、構造変更に合わせて大きく仕様を変更している。 サイズを小さくしたが体格としては強くなり、必要なトルクは確保しているものと判断する。
- TOMIX も小型化を実施しているが、その仕様は、KATOの第4期のモデルよりも、第3期のモデルの仕様に近い仕様であった。
- コアレスモータは、小型化によって蒸気機関車モデルのボイラー内への格納を可能のして、運転室のシースルを可能にしているが、その一方ではその強さを維持しており、小型強力モータとして模型用のモータとしては新しい展望を切り開いている。
なお、モータ単体の性能は、模型車両としての性能を直接的に示していないことに留意しておこう。 モータから動輪までには減速機構によるトルクの増幅があり、動輪の直径によっても牽引力の違いが発生する。 従って車両としての特性は、モータと減速機構、および動輪の仕様を考慮して設定されているので、それぞれの設計方針の違いに配慮して置く必要があるのだ。
なお、Bトレ用モータのデータを最後に追加しているが、なんだかスッキリしない、もやもやしたものを感じていた。
- Bトレ用モータの特徴は何だろうか?
- 小型であることが浮かび上がってこない!
モータの大小、あるいは強さの比較はどのような尺度で判断するのが良いのだろうか? 小さいのにパワーがある! とは? そこで、モータの出力に注目して比較してみることにしよう。
************ 鉄道模型 動力車の調査 > モータの特性解析 まとめ 追加版 (2016/11/24) と
鉄道模型 動力車の調査 > モータの特性解析 まとめ 追加版2 (2016/11/24) を再編集 ********