
HOME >> 鉄道模型工学 > 動力特性の概要 動力特性の基本式 機械系
動力特性の概要 動力特性の基本式 機械系
Nゲージの鉄道模型を始めたころ、不思議な現象に出会った。 40パーミルの下り坂に入った所で、500系新幹線の車両が、“ギュー”と鳴くような音を出して通り過ぎるのである。 動きもやや不自然であった。 R280のカーブが原因なのかなとも思っていたが、S字カーブの後半ではその現象が見られなかった。
また、さる鉄道模型のブログを閲覧しているとき、SLの重連時のギクシャク運転の話題が記載されていた。 鉄道模型では、機関車など2台以上で連結して運転する場合には、2台のスピードを合わせる必要があるとのことであった。
ここで、疑問が湧いてきた。 実際の鉄道では、複数のモータを使用することは常識的に使われている。 500系新幹線では、16両全車両が動力車であり、各輪にモータが使用されているとすると、16×4=64個のモータが一斉に回っていることになる。 VVVFなる高度な制御が行われているためだろうか? いや、制御技術が未熟であった昔から、複数のモータを使うことは行われているはずであり、制御に頼ることなく各モータはギクシャクせずに駆動しているはずである。
それではなぜ、鉄道模型ではギクシャクするのだろうか?
また、あるとき、鉄道模型のブレーキはどうなっているのかなと思う時があった。 ブレーキ付きの車両なんて聞いたことが無い。 しかし、動力車に於いては坂道では止まったままである。 構造を見ればすぐに納得である。 ウォームギヤを使っているからである。 そして、このウォームギヤがギクシャク運転の犯人ではないのかなと思うようになった。 実際の鉄道では使用されていないウォームギヤが鉄道模型では使用されているからである。
なにか面白そうな現象が見つかりそうな気がして、資料を探しながら、また、自分で測定しながら、この “ なぜ、鉄道模型ではギクシャクするのだろうか? ” という疑問を追及してきた。
あくまで、ホビーとしての範疇であるため、充分な調査はできないが、知恵と工夫を駆使しながら、工作と探究心を楽しんできた。
************ 鉄道模型工学概論 動力特性の理論と測定 (2011/2/21) を再編集 ********
■ 動力特性の基本式
大袈裟に鉄道模型工学と言うからには、それなりの理論的裏付けが必要となってくる。 そこで、自分なりの知識を駆使して解析してみることにした。
ただし、今、自分が興味を持っているNゲージの鉄道模型に於いては定常運転で楽しむものであり、その加速状態や減速状態を取り上げる必要は殆んど無いと考えている。 そこで、理論といっても過渡応答などの非定常な運動を対象とするのではなく、定常的な運動を検討対象とする。 このため、定常状態を考察する静特性に絞って検討していく。 勿論、ギクシャク運転は、振動問題として動的に解析する必要があるが、いきなりそのようなジャンルに突っ込んでも脱線するのが落ちである。 そこで、まず静的な定常運転状態をしっかり把握することが解析かつ理解しやすいと考えた。
このため、ここでは速度一定の状態、すなわち定常状態での静的な性能特性を検討する。 また、新幹線の模型と言えども空気抵抗の影響はほとんどないため、この影響も無視するものとする。
■ 登り坂
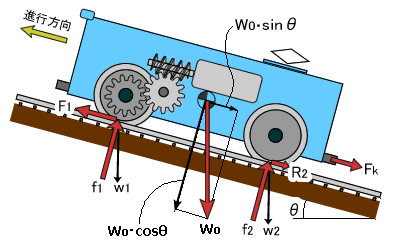
まず、蒸気機関車、電機機関車、あるいはモータ付きの電車など、動力を持っている動力車について考える。 その動力車に掛かる外部からの力に注目し、その登り坂を登っている状態の力関係を検討する。
右にこの時の力関係を簡略化して示している。 また、車両が外部より受ける力は赤の矢印で示し、その力の方向は図に示す方向をプラス方向とする。
車両重量をW0、駆動輪の軸荷重をw1、レールからの抗力をf1、従動輪の軸荷重をw2、レールからの抗力をf2とすると、
![]()
![]()
![]()
w1とw2の比率は、重心の位置や車輪の数、配列、および台車とその支持構造によって決まってくるが、解析の簡素化のために、ここでは検討しない。 さらに、カプラーに掛る力 Fk についても、その高さ方向によって、車体にモーメントを発生させるが、これも簡素化して 駆動力や抵抗力と同一平面上で作用するものとする。
駆動輪の駆動力をF1、従動輪の抵抗力をR2、カプラーに掛かる牽引力をFkとすると、力の釣り合いより、
![]()
ここで、勾配をゼロ、即ち θ = 0 とすると平地走行状態を示し、牽引力をゼロ、即ち Fk = 0 とすると動力車の単機走行状態を示すこととなる。
■ 降り坂
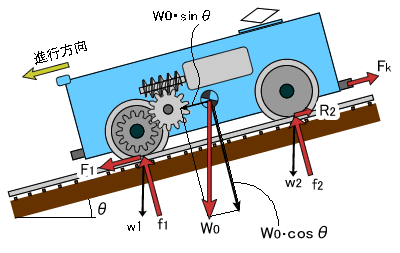
降り坂における力の関係を右に示す。 登り坂との違いは、勾配の方向が反対となり、車両重量の分力W0・sinθが進行方向に作用し、車両を押す方向に働くことである。 しかし、降り坂の場合のθの値をマイナスで表現すれば、(4)式をそのまま適応することが出来る。
また、一般に牽引されている車両も車両重量の分力が進行方向に作用するため、牽引力をFkも図とは反対方向に作用する。 この場合も、マイナス方向の力と表現すれば、(4)式をそのまま適応することが出来る。
この結果、動力車の駆動力F1は、駆動力ではなくて、図とは反対方向に作用するブレーキ力、あるいは制動力として作用しなければ、力の釣り合い取れない。 自動車で坂を下り場合に、エンジンブレーキが必要となる状態と同じである。 そして、駆動力F1が制動力として作用している場合は、マイナス方向の力と考えれば、(4)式をそのまま適応することが出来る。
これらの力関係は、θの値や抵抗力R2値の大きさによって左右されるのは当然である。 このため、θの値が小さく、抵抗力R2値が大きい場合には、駆動力F1は駆動側であったり、制動側であったりと変化するものと思われ、条件によって複雑な変化をするものと思われる。
************ 動力特性の基本式 上り坂/下り坂 (2011/2/21) を再編集 ********
■ 減速機
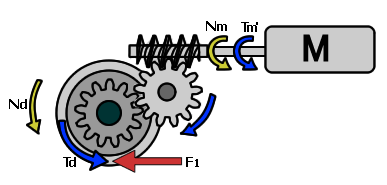
次に車両内部の機構に目を向けよう。 Nゲージ模型では、一般的にDCモータとウオームギヤによる減速機構を採用している。 また、モータ軸をモータの両側から取り出したり、歯車を色々組合わせて、複数の車輪で駆動出来るように工夫されている。 しかし、動力性能を考える場合には、これらを単純化して、ひとつの動輪に集約して考えることにする。
減速機構のインプットとアウトプットを、モータの回転数 Nm とトルク Tm' 、および、動輪の回転数 Nd とトルク Td に設定する。 すると回転数に関しては、歯車がかみ合っているため、ギヤ比を i とすると、
![]() (5)
(5)
の関係が成り立ちます。 歯飛びや破損しない限りこの関係は厳密に守られます。
この減速比(ギヤ比)は、「動輪を1回転させるのに、ウォーム軸を何回転させればよいか」 と考えるもので、ウォームが1条ネジであれば、ウォームを1回転させることにホイールギヤの歯は、1個進む。 そして歯数 Zd 枚ある動輪を1回転させるには、ウォームを Zd 回回転させる必要がある。 即ち、減速比 i は、 i = Zd となる。 ウォームが2条ネジであったり、ホイールギヤなどが2段ギヤになっている場合には、ここで増減速されるので、この場合にはその値も計算して置く必要があり、アイドラギヤの歯数は関係ないことも理解しておこう。
次に、減速機構の損失トルクの想定について、ウォームギヤの構造や測定データの内容を検討する中で、速度の項と力の項を分離して考えることにした。 即ち、損失トルクを回転数に依存する成分とトルクの大小に依存する成分に分離して考える。 そして、この回転数は入力側のモータの回転数 Nm とし、トルクは、動輪のトルク Td とすることにした。 これは、減速機構の大部分の損失トルクはウォームギヤの歯面の滑りで発生していると考えたからである。 もし速度に関係するのであれば、歯面を滑る速度、即ちウォームの回転数に関係し、力に関係するならば、歯面に掛る抗力、即ちウォームホイールのトルクに関係するはずである。 そして、ウォームホイールのトルクは動輪のトルク Td に置き換えることが出来ます。
即ち、 減速機構の速度の項に関する損失トルクを Tn 、 力の項 あるいは 抗力項 を Tt とすると、
![]() (6)
(6)
![]() (7)
(7)
となる。 この抗力項の R7 は一種の摩擦係数とも考えれます。 そして、モータのトルク Tm' と、動輪のトルク Td の間には、
![]() (8)
(8)
の関係が成立します。 R8 は、速度にも抗力にも関与しないその他の損失トルクとしています。
■ 車両とスリップ率
模型車両でも実車と同様に、レールと動輪とのあいではスリップ現象が発生している。 勾配のきつい登り坂では車輪がカリガリと空転してスタック状態になるのは日常茶飯事である。 そこでこのスリップ現象も考慮しておこう。 速度に関係する要素だけに絞って簡素化したイラストを右に示す。
ここで、減速機構での速度関係は、歯車機構でガッチリと規制されているのでギヤ比のみで連動しているが、動輪の回転数と車速の関係は、動輪のスリップによって速度差は発生している。 即ち、車両の速度を V 、動輪の回転数を Nd 、動輪の直径を D 、スリップ率をβとすると、
![]() (9)
(9)
の関係が成立します。 スリップ率がゼロ( β = 0 )、即ち、動輪のスリップが全く無い場合には、動輪の回転はすべて車速に変換されるが、 β = 100%の場合は動輪が滑ってしまい、車両は全く前に進まない状態に陥ってしまうのである。 即ち、V = 0 となってしまうのである。
一方で、動輪のトルクを Td 、動輪の駆動力を F1 とすると、
![]() (10)
(10)
となります。 さらに、カプラーに掛る牽引力 Fk は前述の式(4)となる。
************ スリップ率について考察する (2014/12/25) を再編集 ********
■ 動輪からモータを駆動する場合
ここまでは、モータから駆動した場合を考えているが、次に動輪からモータを駆動する場合を考えてみる。
電車や電気機関車、あるいは電気自動車などでは、車輪からモータを駆動させ、モータを発電機として使用して電気ブレーキ、 あるいは回生ブレーキとして作用させている。 しかし、鉄道模型の場合、減速機としてウオームギヤを採用しているため、逆から回すことが出来ない。 逆効率がゼロなのである。 このため、車輪から回そうとしてもロックして回転させる事ができないのである。 鉄道模型にとって、このことがメリットであったり、デメリットでもある。
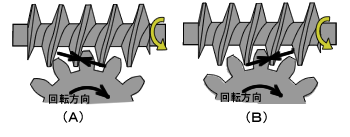
ここで、ウオームギヤの接触面における状態を見てみよう。
右の図の(A)の状態 が通常の回転状態である。 ウオームが左回転すると歯面はウオームの軸方向を図の右方向に進み、接触面を押しながらホイールを右回転させる。 ホイールに負荷がかかっている場合には、常にウオームから押されているため、 接触している歯面は離れることはない。
図の(B)の状態 はこの逆の場合を図示したものである。 ホイールは車輪からの回転トルクによって回転方向に回ろうとするが、ウオームの歯面が邪魔して回転できない。 この力がウオームを回す力となれば逆方向からの回転が可能となるのであるが、一般には摩擦力によってロックされてしまいう。 これはネジが緩まないのと同じ原理である。 しかし、ウオームはモータによって回されているから、モータの回転トルクによって回転することが出来る。 ウオームの回転によって歯面は右方向に移動するのでホイールも右回転することができ、ホイールは力を保持しながら回っていることになる。
すなわち、(A)の状態は力で押しながら前に進む状態であり、(B)の状態は力を保持しながら後に下がっている状態であると言える。 そして、(B)の状態でのモータの回転トルクは、歯面の摩擦抵抗に打勝つだけのトルクで充分であり、ホイールに掛かる大きな制動力に対抗する必要はない。 とは言っても歯面の摩擦抵抗はホイールのトルクに比例するので、何割かは関係するものと思われる。 そして、前記の力の関係式は成立せず、新たな関係式を検討しなければならない。
また、(B)の場合、ホイールの摩擦が大きくなると、 回転が止まってしまい(A)の状態に移行してしまう。 すると、モータのトルクで回転することになる。 即ち、(A)と(B)を行ったり来たりすることになり、動きがギクシャクしたものとなる恐れがある。
即ち、車輪が駆動状態にあるときは、(A)の状態を保って回転するが、 制動状態にあるときは、(A)と(B)を行ったり来たりする状態が発生することがある。 ある程度の大きさの制動状態にあるときは、(B)で回転すると考えられるが、運動としては不安定な状態である。 このような動きについて、実際の模型で観察しなければ本当かどうかはわからないと考えている。
************ 動力特性の基本式 減速機 (2011/2/21) を再編集 ********