
丂丂HOME >> 揝摴柾宆岺妛丂>丂應掕崁栚偺捛壛丂揹尮嫙媼儔僀儞偲僗儕僢僾棪晄椙偺夵慞
揝摴柾宆岺妛 丂應掕崁栚偺捛壛丂揹尮嫙媼儔僀儞偲僗儕僢僾棪晄椙偺夵慞
丂憱峴偡傞摦椡幵偐傜桳慄捠怣偵傛偭偰僨乕僞傪廂廤偟傛偆偲偡傞僾儘僕僃僋僩傕丄偦傟側傝偺栚搑偑棫偭偰偒偨偑丄傑偩戝偒側壽戣偑巆偭偰偄傞丅丂偦傟偼揹尮嫙媼儔僀儞偺揹埑崀壓偲僗儕僢僾棪晄椙尰徾偺栤戣偱偁傞丅丂偦偺夵慞傪恑傔偰偒偨偑丄夵慞側偺偐夵埆側偺偐偺嫹娫偵棊偪崬傒丄巐嬯敧嬯偟偨偑傗偭偲夝寛曽朄偑尒弌偣偨丅
丂丂.
仭丂揹尮嫙媼儔僀儞偺栤戣
丂揹尮嫙媼儔僀儞偵偍偄偰丄揹埑崀壓偺栤戣偑敪惗偟偰偄傞丅丂儗乕儖柺偺揹埑偲丄揹埑應掕揰偱偺揹埑嵎偑丄柍帇偱偒傞抣偲偼尵偄擄偄寢壥偲側偭偰偄偨丅丂100 乣200mA 偺帪偵 0.15volt 偺揹埑崀壓偑敪惗偟偰偄傞偲偄偆偙偲偼丄栺侾兌偺掞峈偑桳偭偨偲偄偆帠偱偁傝丄掞峈偲偟偰偼嬐偐偱偁傞偑應掕偺栚揑偐傜偡傞偲塭嬁搙崌偄偼柍帇偱偒側偄偲敾抐偡傞丅丂偙偺嫙媼揹埑偺應掕岆嵎偵偮偄偰偼丄栤戣揰傪惍棟偟偰偍偙偆丅
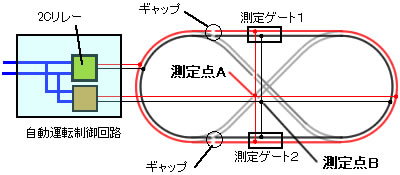
- 丂壽戣侾乯丂應掕僎乕僩偺儗乕儖偲應掕億僀儞僩偲偺娫偵夘嵼暔偑懡偄
- 崱夞偺僔僗僥儉曄峏偵傛偭偰儗乕儖傊偺媼揹億僀儞僩偑應掕僎乕僩偐傜棧傟偨応強偵愝抲偡傞偙偲偵側偭偨丅丂偝傜偵丄媼揹億僀儞僩偲應掕僎乕僩娫偺儗乕儖偵偼丄暘婒梡偺億僀儞僩偑夘嵼偟丄儗乕儖傪偮側偖僕儑僀儞僩傪偄偔偮偐捠夁偡傞塇栚偵側偭偰偟傑偭偨丅丂偝傜偵丄嫙媼揹埑傪應掕偡傞揹埑應掕揰偲媼揹億僀儞僩偺娫偵偼丄儗乕儖偺嬌惈傪曄峏偡傞儕儗乕傕懚嵼偟丄攝慄傕挿偔側偭偰偄傞丅丂偙偺偨傔丄寁應拞偵憱峴偟偰偄傞儗乕儖柺偲揹埑傪應掕偡傞應掕揰偺娫偵偼丄戝偒側掞峈偑夘嵼偡傞傛偆偵側偭偨偺偱偁傞丅
- 丂壽戣俀乯丂儗乕儖偺嬌惈偑斀揮偡傞
- 偝傜偵栵夘側偺偼丄慁夞曽岦傪媡揮偝偣傞偺偱丄儗乕儖偺嬌惈偑斀揮偡傞偺偱偁傞丅丂偛懚抦偺傛偆偵丄Arduino 偺傾僫儘僌擖椡偼儅僀僫僗揹埑傪應掕弌棃側偄偺偱丄儗乕儖偺椉懁傪扨偵愙懕偡傞偩偗偱偼懳墳偱偒側偄丅
- 丂壽戣俁乯丂僎乕僩侾偲僎乕僩俀偺嬌惈偑斀懳偵側傞応崌偑偁傞
- 儕僶乕僗憱峴帪偵偼丄僎乕僩侾偲僎乕僩俀偺嬌惈偑斀懳偵側傞偺偱丄榖偼偝傜偵傗傗偙偟偔側傞丅.
丂傑偢嵟弶偵敪憐偟偨偺偼丄應掕僎乕僩偺嬤偔偵愝抲偟偨應掕揰偐傜揹埑傪寁應偟丄儗乕儖偺嬌惈曄壔傪僽儕僢僕僟僀僆乕僪偱嬌惈傪偦傠偊偰應掕偡傞曽朄偱偁傞丅丂偱傕偙偺傾僀僨傿傾偼僽儕僢僕僟僀僆乕僪偺僇僞儘僌傪尒偰丄偡偖偵掹傔偞傞傪摼側偐偭偨丅 僽儕僢僕僟僀僆乕僪DIP宆DI1510 偺椺偱偼丄100mA 帪偵偼 0.8volt 偺揹埑崀壓偑敪惗偟偰偄傞丅丂揹埑崀壓検偑暘偐偭偰偄傞偺側傜丄揹棳抣偐傜廋惓偱偒傞偲傕峫偊傜傟傞偑丄揹埑崀壓偺杊巭懳嶔偵偼憡斀偡傞梫慺偱偁傞偺偱丄偙偺傾僀僨傿傾傪攋婞偟偨丅
仭丂揹尮嫙媼儔僀儞偺夞楬偺夵慞
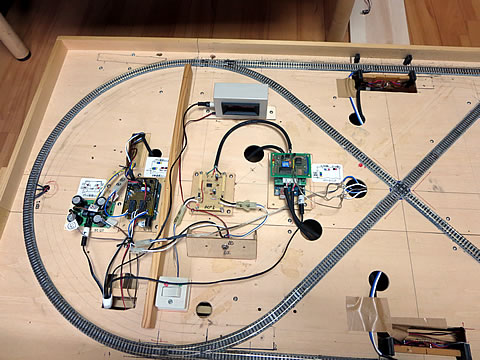
丂愝掕偟偰偒偨慄楬偺憱峴忬懺傪暘愅偟偰偄偨寢壥丄僎乕僩侾偺慄楬偲僎乕僩俀偺慄楬傪捈愙愙懕偟偰傕栤戣偺柍偄僷僞乕儞偑桳傞偙偲偵婥偑晅偄偨丅丂偦偺傾僀僨傿傾傪幭媗傔偰壓婰偺傛偆側僷僞乕儞傪嵦梡偡傞偙偲偵偟偨丅
 丂.
丂.
丂暘婒億僀儞僩偺嬤偔偵怴偨偵僊儍僢僾傪俀儢強愝抲偟丄塃敿暘偺慄楬傪偡傋偰愙懕偡傞丅丂栜榑儕僶乕僗慄偵偼廬棃偺僊儍僢僾偼愝掕偟偨傑傑偱偁傞丅丂偙偺傛偆側攝慄偵偡傞偲丄僎乕僩侾偲僎乕僩俀偺慄楬傪僟僀儗僋僩偵愙懕弌棃傞偺偱丄僎乕僩侾偲僎乕僩俀偺嬌惈偑斀懳偵側傞栤戣偼夝徚偝傟傞偺偱偁傞丅丂壽戣俁傊偺懳墳丅
丂師偵丄儗乕儖揹埑偺應掕偵偼丄嵍偺恾偺傛偆偵應掕揰俙偲俛傪愝偗丄偙偙偺揹埑傪捈愙應掕偡傞偺偱偁傞丅丂偦偟偰丄儗乕儖揹埑偲偟偰偼丄乮俙亅俛乯傪寁嶼偟偦偺愨懳抣傪寁嶼偡傞偺偱偁傞丅丂偡傞偲丄儗乕儖偺揹埑嬌惈偑曄壔偟偰傕丄懳墳弌棃傞偺偱偁傞丅丂壽戣俀傊偺懳墳丅
丂傑偨丄應掕揰偲儗乕儖偺娫偼丄掞峈偺彮側偄懢偄揹慄偱攝慄偟偰偍偗偽丄偦偺娫偺揹埑崀壓偼彮側偄偼偢偱偁傞丅丂壽戣侾傊偺懳墳丅
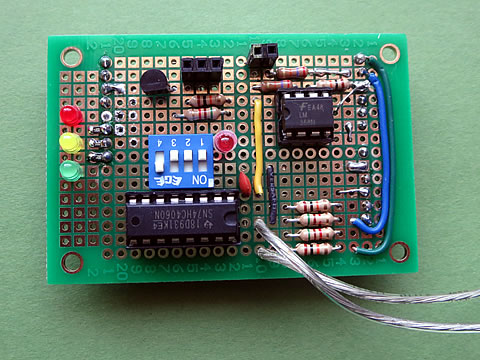
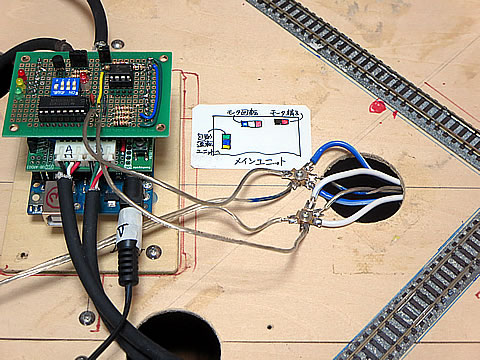
丂岾偄偵傕Arduino 偺傾僫儘僌擖椡抂巕偼傑偩巆偭偰偄傞偺偱偙傟傜偺傾僀僨傿傾嵦梡偡傞偙偲偵偟偨丅丂揹埑應掕揰俙偲俛偼丄揹埑偑12儃儖僩傑偱應掕偱偒傞傛偆偵偡傞偨傔偵丄崱傑偱巊梡偟偰揹埑應掕乮専抦乯晹偲摨條偵丄10K兌偲5.1K兌偺掞峈傪巊梡偟偰暘埑偡傞夞楬偲偟偰丄Arduino 偺A4偲A5 億乕僩偵擖椡偝偣傞丅丂傑偨丄儊僀儞僔乕儖僪忋偵偁偭偨應掕忬懺傪帵偡俁屄偺LED傪僒僽僔乕儖僪偵堏摦偝偣傞偙偲偵偟偨丅丂僒僽僔乕儖僪傪儊僀儞僔乕儖僪偺忋偵廳偹傞偺偱丄LED偑尒偊側偔側偭偰偄偨偐傜偱偁傞丅
丂僒僽僔乕儖僪偲儗乕儖傊偺攝慄嬶崌傪壓偵帵偡丅
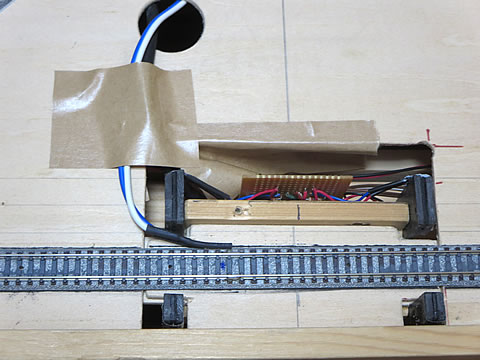
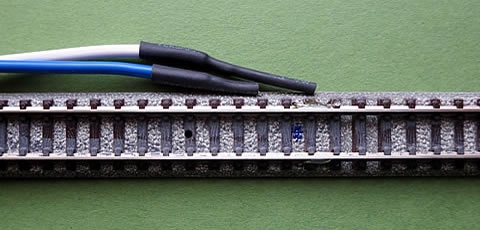
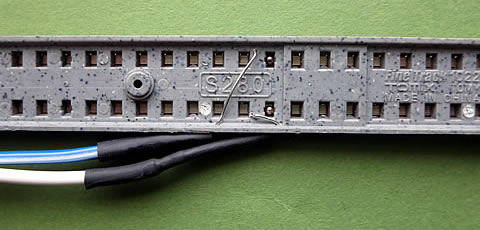
丂攝慄偑廤拞偡傞應掕揰 A 偲 B 偺晹暘偼丄愱梡偺抂巕傪嶌偭偰傑偲傔偰僱僕巭傔偟偨丅丂壓偺幨恀丅丂偙偺抂巕偼丄僕儍儞僋敔偺拞偐傜扵偟偰偒偨傕偺偱偁傝丄宍忬傪尒偰偦偺杮懱偑僺儞偲棃傜傟傞曽偼揝摴柾宆偺僾儘偱偡偹丅丂KATO惢偺屌掕慄楬梡僕儑僀儞僩 乮昳斣丗24-810乯 偺僕儑僀儞僩傪愗傝庢偭偨屻偺僼儗乕儉偺晹暘偱偡丅丂儕儞惵摵惢偺晹昳偱丄僼儗僉僔僽儖儗乕儖偺僕儑僀儞僩偵巊偭偰偄傞偨傔丄偦偺捠揹惈偲嫮偝偼曐徹偝傟偰偄傞偲峫偊偰偄傑偡丅

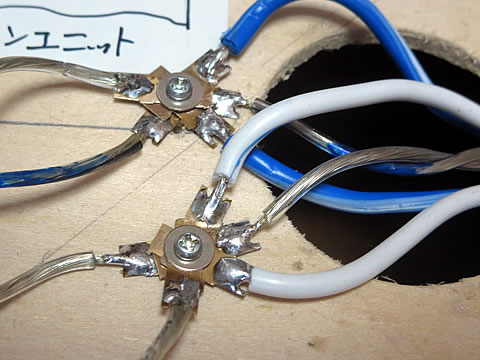
丂偦偟偰丄偙傟傜偺抂巕傪 A 偲 B 揰枅偵俆杮偯偮傂偲傑偲傔偵偟偰丄塃忋偺幨恀偺條偵傛偆偵應掕戜偵僱僕巭傔偟偰偄傑偡丅
// Measure-3 2016/2/5
// avol_pin 4 偲 bvol_pin 5 傪捛壛偡傞丅
丂丂丂丂丂乮徣棯乯
//********塃慁夞丂搊傝嶁丂僎乕僩侾 **************
slit1 = digitalRead(SLIT1_PIN) ;
slit2 = digitalRead(SLIT2_PIN) ;
if (slit1 == HIGH && slit2 == HIGH){
丂丂丂丂丂丂丂// 僎乕僩怣崋OK
//弨旛
vol = 0;
mvol = 0;
avol = 0;
bvol = 0;
cur = 0;
n = 0;
mcount = 0;
digitalWrite(LEDG_PIN, HIGH);
//擖岥僗儕僢僩
while (slit1 == HIGH) {
丂丂丂丂丂丂丂丂丂 // 擖岥僗儘僢僩偺捠夁傪懸偮
slit1 = digitalRead(SLIT1_PIN) ;
digitalWrite(LEDG_PIN, HIGH);
}
t1 = millis(); //丂擖岥僗儘僢僩偺捠夁帪崗
attachInterrupt(0,m_count,FALLING);
丂丂丂丂丂丂丂丂丂 // 妱傝崬傒傪桳岠
digitalWrite(LEDY_PIN, HIGH);
//弌岥僗儕僢僩
while (slit2 == HIGH) {
丂丂丂丂丂丂丂丂 丂// 弌岥僗儘僢僩偺捠夁傪懸偮丅
//丂偙偺娫偵揹埑偲揹棳傪應掕偡傞
voltage = analogRead(vol_pin);
current = analogRead(cur_pin);
mvoltage = analogRead(mvol_pin);
avoltage = analogRead(avol_pin);
bvoltage = analogRead(bvol_pin);
vol = vol + voltage;
mvol = mvol + mvoltage;
avol = avol + avoltage;
bvol = bvol + bvoltage;
cur = cur + current;
n = n + 1;
slit2 = digitalRead(SLIT2_PIN);
}
t2 = millis(); // 弌岥僗儘僢僩偺捠夁帪崗
detachInterrupt(0); // 妱傝崬傒傪柍岠偵偡傞
angle = analogRead(angle_pin);
丂丂丂丂丂丂丂丂丂丂丂丂 //孹幬戜偺妏搙傪撉傓
cancel = digitalRead(BASE_PIN) ;
if (cancel == LOW){
angle = 9999;
}
//弌椡張棟
tt = t2 - t1;
String buf = String(vol)+","+String(cur)+","
丂丂+String(avol)+"," +String(bvol)+","
丂丂+String(mvol)+","+String(mcount)+","+String(n)
丂丂+","+String(tt)+","+String(angle)+",U,"+ ",E";
Serial.println(buf);
digitalWrite(LEDY_PIN, LOW);
delay(500);
}
else {
digitalWrite(LEDR_PIN, HIGH); //僎乕僩晄椙偺怣崋
delay(500);
digitalWrite(LEDR_PIN, LOW);
}
//**丂**塃慁夞丂壓傝嶁丂僎乕僩俀*******丂*
乮 徣棯乯
************丂丂揹尮嫙媼儔僀儞偺夵慞丂乮2016/2/10乯 傪嵞曇廤丂********丂丂丂
丂怴偟偔嶌惉偟偨夞楬偼埲慜偲摨條偺峔惉偱偁傞偑丄掞峈抣側偳偺僶儔僣僉傪峫椂偟偰丄幚應抣偵傛傞峑惓傪幚巤偟偨丅丂嫙媼揹尮偲偟偰埨掕壔揹尮傪巊梡偟丄應掕揰俙偲俛偼傂偲傑偲傔偟偰俛揰偵愙懕偟丄揹埑應掕偺婎弨偲側傞僥僗僞偺僾儔僗抂巕傪俛揰偵愙懕偟偰偺傪偣偮偧偔偟丄僥僗僞偺儅僀僫僗抂巕偼僒僽僔乕儖僪偺GND晹偵愙懕偡傞丅丂慄楬忋偵偼摦椡幵傪憱傜偣偢偵揹棳偑棳傟側偄忬懺偵偟丄丄Arduino 偱撉傒庢偭偨揹埑偺巜帵抣偲僥僗僞偺揹埑偺娭學傪僌儔僼壔偟偨丅
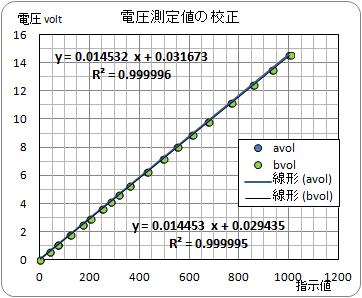
丂應掕揰俙偲俛偼摨偠揹埑偱偁傞偑丄傾僫儘僌擖椡抣偼嬐偐偱偼偁傞偑堎側偭偰偄傞帠偑暘偐傞丅丂傑偨丄埨掕壔揹尮偵昞帵偝傟偨悢抣傗儌僯僞偵昞帵偝傟偨悢抣偲僥僗僞偺悢抣傕丄1/100乣2/100儃儖僩掱搙偼堎側偭偰偄偨偑丄崱夞偼僥僗僞乕偺悢抣傪婎弨偲偟偨丅丂堦斣怣梡偱偒偦偆偩偭偨偐傜偱偁傞丅丂偙偺僌儔僼偺捈慄嬤帡幃傪姺嶼幃偵嵦梡偡傞丅
仭丂僗働僢僠偺廋惓
丂傾僫儘僌擖椡偺愝掕偲丄應掕揰俙偲俛偺揹埑應掕丄偍傛傃彂偒弌偟傪忋偵帵偡條偵捛壛廋惓偟偨丅丂僗働僢僠柤丗 Measure-3 傪嶲徠丅丂幵椉偑應掕僎乕僩僀儞偡傞偲丄廬棃偺揹埑偲揹棳丄偍傛傃儌乕僞抂巕揹埑偵壛偊丄應掕揰 俙 偲 俛 偺揹埑傕應掕偟偰丄應掕抣傪壗搙傕椵愊偟側偑傜僎乕僩傾僂僩傪懸偮丅丂懄偪僎乕僩捠夁拞偼楢懕偟偰應掕偟懕偗偰偄傞偺偱偁傞丅丂僎乕僩傪捠夁偡傞帪娫 tt 偲孞傝曉偟應掕偟偨夞悢 n 傕弌椡偟偰偄傞偺偼丄廬棃捠傝偱偁傞丅
丂偙傟傜偺張棟傪丄塃慁夞偲嵍慁夞丄偍傛傃僎乕僩侾偲俀 偺巐偮偺応崌偵暘偗偰丄僎乕僩僀儞偡傞僙儞僒偲僎乕僩傾僂僩偡傞僙儞僒傪偦傟偵崌傢偣偰婰弎偟偰偄傞偑丄張棟偡傞撪梕偼摨偠偱偁傞丅
************丂丂夞楬掕悢偺峑惓偲僥僗僩憱峴丂乮2016/2/14乯 傪嵞曇廤丂********丂丂丂
仭丂僗儕僢僾棪晄椙偺尰徾
丂師偵丄僥僗僩憱峴拞偵婥晅偄偨晄嬶崌偵偮偄偰偺懳嶔傪曬崘偡傞丅
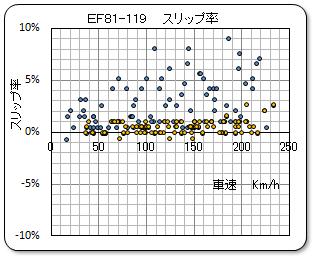
丂傑偢丄晄椙偺忬懺傪惍棟偟偰偍偙偆丅丂寁嶼偝傟偨僗儕僢僾棪偺僨乕僞偵偮偄偰塃偺僌儔僼偵帵偡偑丄埲慜偺應掕僨乕僞傪墿怓偺揰偱丄崱夞偺僥僗僩僨乕僞傪惵怓偺揰偱僾儘僢僩偟偰偄傞丅
丂埲慜偺僨乕僞傛傝傕僶儔僶儔偲側偭偰偍傝丄應掕偼暯扲楬扨婡憱峴帪偺忬懺傪應掕偟偰偄傞偺偱丄摦椫偑僗儕僢僾偟偰偄傞偲偼峫偊傜傜側偄丅丂懄偪應掕偑偍偐偟偄帠偼柧傜偐偱偁傞丅
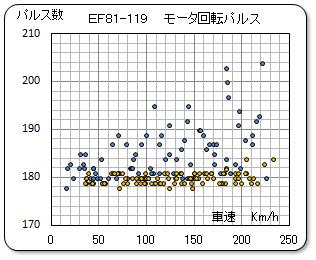
丂寁嶼偺尦偲側偭偨儌乕僞夞揮偺僷儖僗偺僨乕僞傪尒偨偺偑椬偺僌儔僼偱偁傞丅丂柧傜偐偵僷儖僗悢偑懡偔側偭偰偄傞丅丂應掕娫妘偑 108mm 偺僎乕僩娫傪捠夁偡傞偲偒偺儌乕僞夞揮僷儖僗傪僗儕僢僾棪僛儘偺応崌偲偟偰寁嶼偡傞偲丄
丂丂丂僷儖僗悢丂= 俀亊108亊i /兾D 丂丂丂丂俀丗 夞揮儅乕僉儞僌偵傛傞堦夞揮摉偨傝偺僷儖僗悢丂丂丂i 丗僊儎斾丂丂丂D 丗摦椫捈宎 mm
偱媮傔傜傟傞偺偱丄捠夁懍搙偵娭學側偔堦掕抣偲側傞丅丂崱夞偺応崌偼丄179.0 夞偺僷儖僗偑僗儕僢僾棪僛儘偲側傞丅丂僷儖僗應掕側偺偱丄應掕僞僀儈儞僌偺偢傟偵傛傝慜屻偺悢僷儖僗偼岆嵎偵側傞偑丄愭夞偺應掕僨乕僞偼惓妋偵應掕偟偰偄傞帠傪徹柧偟偰偄傞傕偺偺丄崱夞偺僨乕僞偼柧傜偐偵栤戣偑偁傞偙偲偼柧敀偱偁傞丅
仭丂夵慞埬偺柾嶕
丂栤戣偼僷儖僗偺應掕夞楬偲傒偰丄僷儖僗攇宍偺娤嶡傪峴偭偨丅丂偦偺寢壥丄攇宍偼嬮宍攇偲尵偄擄偄曵傟偨攇宍偱偁偭偨偺偱丄僲僀僘側偳塭嬁側偳偱僟僽儖僇僂儞僩偑敪惗偟偰偄偨偲悇掕偟偨丅丂偦偟偰丄僷儖僗僇僂儞僩曽幃偺曄峏傗丄NAND慺巕丄偁傞偄偼僆儁傾儞僾側偳怓乆側僥僗僩傪幚巤偟偰埫拞柾嶕偺忬懺偱偁偭偨丅
丂偦偺傛偆側拞偱丄変偑僒僀僩傪尒偰偔偩偝偭偰偄傞儐乕僓乕偺曽偐傜婱廳側傾僪僶僀僗傪捀偄偨丅丂偦傟偼丄栚偐傜椮偺忬懺偱偁傝丄偝偭偦偔幚尡傪幚巤偟偨丅丂傾僪僶僀僗偼 乽 僩儔儞僕僗僞傪僄儈僢僞僼僅儘傾偱巊梡偡傞偲丄僎僀儞偼1攞偱偡丅 僐儗僋僞偐傜弌椡傪庢傟偽夵慞偝傟傞偲巚偄傑偡丅乿偲偺撪梕偱偟偨丅丂偦偆側傫偩丄僩儔儞僕僗僞夞楬偱傕僾儖僟僂儞曽幃傪側傫偲側偔巊偭偰偄偨偺偱丄婥偵傕棷傔偰偄側偐偭偨偑丄偙傟偵傛偭偰崱傑偱偺尰徾傪棟夝偡傞帠偑弌棃偨丅丂傾僪僶僀僗傪捀偄偨MJ 偝傫偵姶幱丄姶幱偱偁傞丅 偦偟偰僄儈僢僞僼僅儘傾側傞梡岅傕巒傔偰嫵傢偭偨丅丂偍抪偢偐偟偄尷傝偱偁傞丒丒丒丒丒両
丂廋惓屻偺夞楬傪壓嵍偵帵偡丅丂拞墰偼廋惓慜偺夞楬偱丄塃偺僆僔儘夋柺偼偦傟偧傟偺応崌偺攇宍傪暲傋偰婰嵹偟偨丅
 丂丂丂
丂丂丂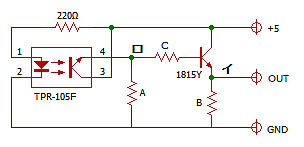 丂丂丂
丂丂丂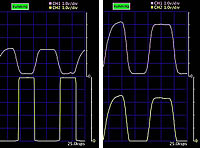
丂僙儞僒偐傜偺揹埑偺掅偄嶳宍偺僷儖僗偱傕丄偙偺僾儖傾僢僾夞楬偵傛偭偰攇宍惍宍偡傟偽丄鉟楉偵惍宍偝傟偨嬮宍攇偲偟偰張棟偝傟偰偄傞偙偲偑妋擣偝傟偨丅丂偦偟偰僲僀僘偺塭嬁傪庴偗偵偔偔側偭偨偙偲傕擺摼偱偁傞丅
************丂丂僷儖僗攇宍偺娤嶡乮2016/2/15乯 偲丂夞揮悢専弌晹偺僾儕傾儞僾夞楬偵偮偄偰乮2016/2/17乯丂傪嵞曇廤丂********丂丂丂
仭丂廋惓偝傟偨夞楬
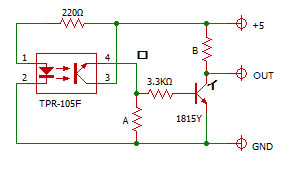
丂偙偆偟偰姰惉偟偨夞楬恾傪壓偵帵偡丅
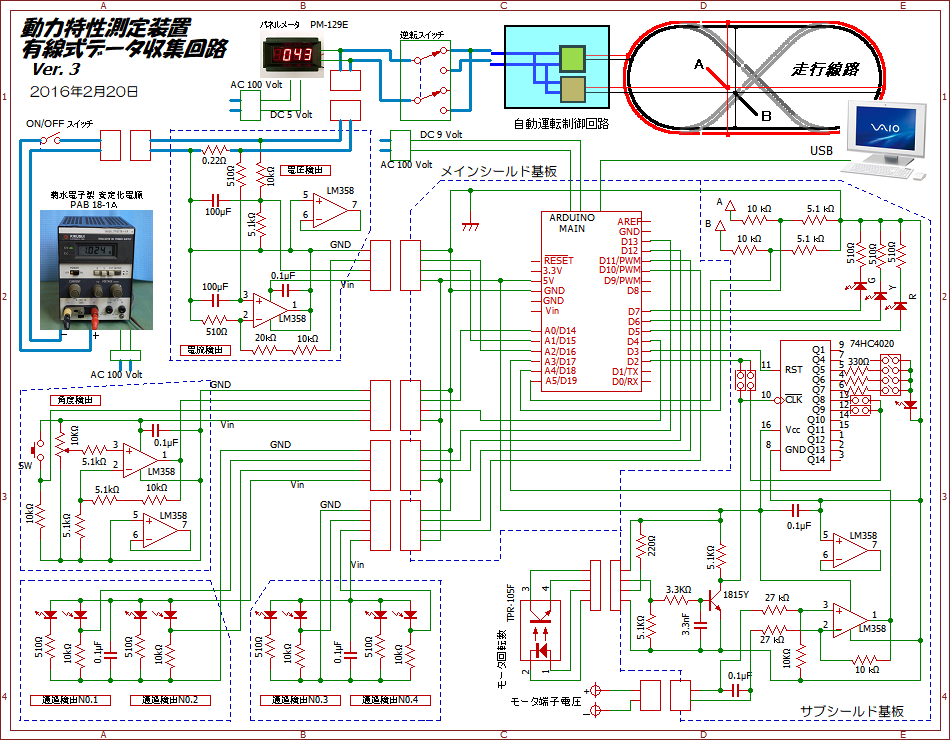
丂彯丄Arduino 偺D2 抂巕偵偼僙儞僒偐傜偺僷儖僗怣崋偺懠偵丄僇僂儞僞乕 IC 偐傜偺擖椡傕慖戰偱偒傞夞楬偲側偭偰偄傞偑丄巐嬯敧嬯偟偨帪偺巆奫偑巆偭偰偄傞偩丅