
HOME >> 鉄道模型実験室 > 回路定数の校正とテスト走行
鉄道模型実験室 No.100 回路定数の校正とテスト走行
■ はじめに
このレポートで実験室の報告が100回目となることに気が付いた。 途中で再編集した都合で番号の抜けなどがあるようであるが、今回が記念する100回目としよう。 さて、先回に続き、新しく工作した電圧測定部の校正とテスト走行結果を報告することにしよう。
■ 電圧測定部の回路定数の校正
新しく作成した回路は、以前と同様の校正であるが、抵抗値などのバラツキを考慮して、机上計算では無くて、すべて実測値による校正を実施するようにしている。 ドリフトや線形性の確認できるからである。
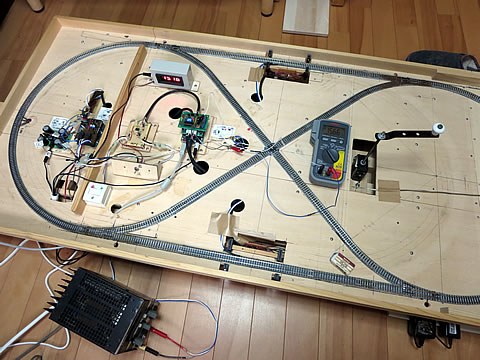
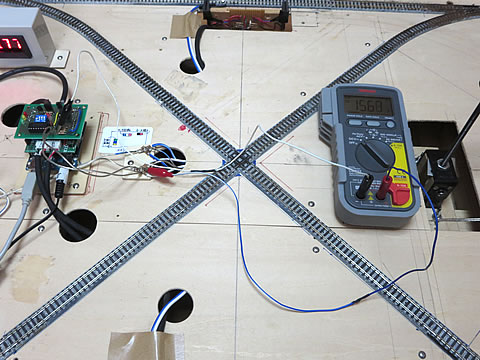
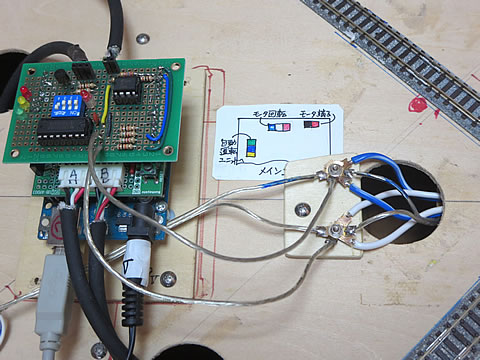
まず、装置全体の状態を上左に示す。 供給電源として安定化電源を使用し、測定点AとBはひとまとめしてB点に接続する。 そしてB点にテスタのプラス端子をせつぞくし、マイナス端子はサブシールドのGND部に接続する。 上右、および下の写真。
// Measure-3 2016/2/5
// avol_pin 4 と bvol_pin 5 を追加する。
(省略)
//********右旋回 登り坂 ゲート1 **************
slit1 = digitalRead(SLIT1_PIN) ;
slit2 = digitalRead(SLIT2_PIN) ;
if (slit1 == HIGH && slit2 == HIGH){
// ゲート信号OK
//準備
vol = 0;
mvol = 0;
avol = 0;
bvol = 0;
cur = 0;
n = 0;
mcount = 0;
digitalWrite(LEDG_PIN, HIGH);
//入口スリット
while (slit1 == HIGH) {
// 入口スロットの通過を待つ
slit1 = digitalRead(SLIT1_PIN) ;
digitalWrite(LEDG_PIN, HIGH);
}
t1 = millis(); // 入口スロットの通過時刻
attachInterrupt(0,m_count,FALLING);
// 割り込みを有効
digitalWrite(LEDY_PIN, HIGH);
//出口スリット
while (slit2 == HIGH) {
// 出口スロットの通過を待つ。
// この間に電圧と電流を測定する
voltage = analogRead(vol_pin);
current = analogRead(cur_pin);
mvoltage = analogRead(mvol_pin);
avoltage = analogRead(avol_pin);
bvoltage = analogRead(bvol_pin);
vol = vol + voltage;
mvol = mvol + mvoltage;
avol = avol + avoltage;
bvol = bvol + bvoltage;
cur = cur + current;
n = n + 1;
slit2 = digitalRead(SLIT2_PIN);
}
t2 = millis(); // 出口スロットの通過時刻
detachInterrupt(0); // 割り込みを無効にする
angle = analogRead(angle_pin);
//傾斜台の角度を読む
cancel = digitalRead(BASE_PIN) ;
if (cancel == LOW){
angle = 9999;
}
//出力処理
tt = t2 - t1;
String buf = String(vol)+","+String(cur)+","
+String(avol)+"," +String(bvol)+","
+String(mvol)+","+String(mcount)+","+String(n)
+","+String(tt)+","+String(angle)+",U,"+ ",E";
Serial.println(buf);
digitalWrite(LEDY_PIN, LOW);
delay(500);
}
else {
digitalWrite(LEDR_PIN, HIGH); //ゲート不良の信号
delay(500);
digitalWrite(LEDR_PIN, LOW);
}
//** **右旋回 下り坂 ゲート2******* *
( 省略)
さらに、専用のスケッチ(Gate-Check-2)を記述し、手前の測定ゲートに信号が入ると測定点AとBからのアナログ入力値を読み取るようにセットする。 線路上には動力車を走らせていないので電流は流れない状態にし、電源の電圧を上げて行き、テスタの読み取り値とアナログ入力値の関係をグラフ化したものを下に示す。
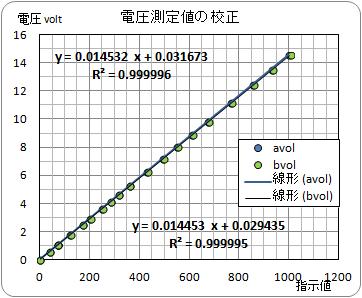
測定点AとBは同じ電圧であるが、アナログ入力値は僅かではるが異なっている事が分かる。 また、安定化電源に表示された数値やモニタに表示された数値とテスタの数値も、1/100〜2/100ボルト程度は異なっていたが、今回はテスターの数値を基準とした。 一番信用できそうだったからである。 このグラフの直線近似式を換算式に採用する。
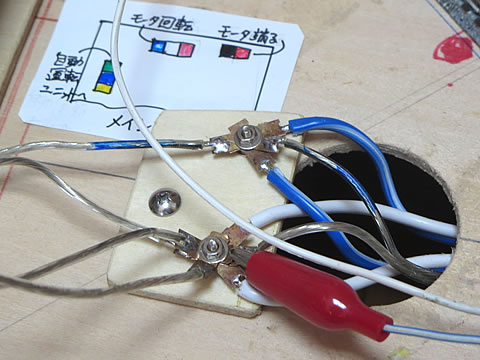
そして、測定終了後は、測定点AとBの端子を下の写真のように、既定の位置に戻した。
■ スケッチの修正
アナログ入力の設定と、測定点AとBの電圧測定、および書き出しを右に示す様に追加修正した。スケッチ名: Measure-3 を参照。 車両が測定ゲートインすると、従来の電圧と電流、およびモータ端子電圧に加え、測定点AとBの電圧も測定して、測定値を何度も累積しながらゲートアウトを待つ。 即ちゲート通過中は連続して測定し続けているのである。 ゲートを通過する時間 tt と繰り返し測定した回数 n も出力しているのは、従来通りである。
これらの処理を、右旋回と左旋回、およびゲート1と2の四つの場合に分けて、ゲートインするセンサとゲートアウトするセンサをそれに合わせて記述しているが、処理する内容は同じである。
■ テスト走行の実施
先回の「試験走行によるシステムの確認」で走行させたEF81-119号機を使用してテスト走行させた。 その結果、速度特性について比較したグラフを下に示す。 先回のデータを黄色の点で、今回のデータを青色の点でプロットしている。
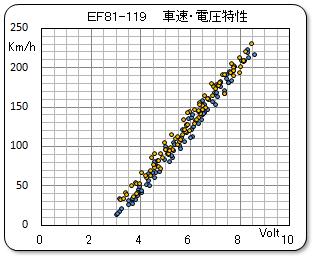
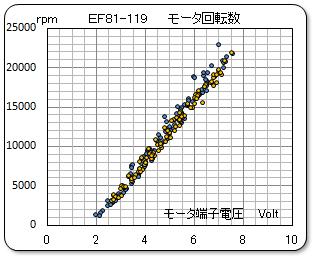
これらの結果を見て、ガッカリ したのである。
改善のつもりで手を加えたのに、その苦労した結果がデータには現れなかったのでる。 逆に電圧降下は大きくなっていた。 これは、集電回路が汚れて来たので電圧降下が大きくなったという言い訳が成り立つ。
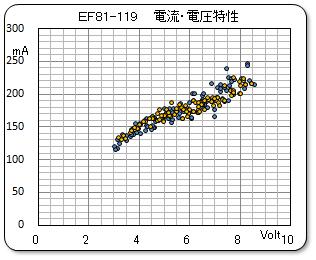
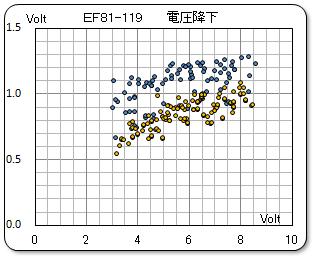
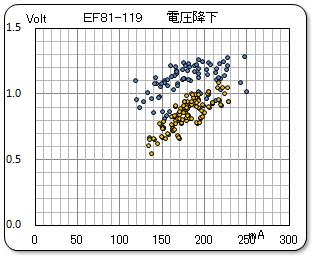
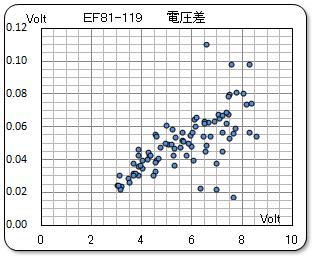
その証拠として、従来の電圧測定点(スケッチ上での vol のデータ )の電圧測定値と、今回追加して 測定点AとBから計算した電圧測定値の差を計算してグラフ化したものを右に示す。
この電圧差は、測定点間の電圧降下量と判断出来るので、今回の改善効果を示しているものと考えている。
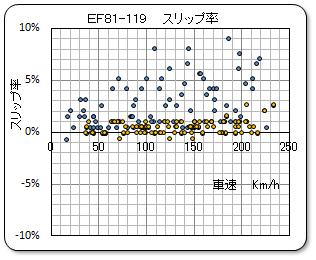
問題なのは、スリップ率のデータでる。 先回のデータと比べて何故か悪化しているのである。 今回の改善の成否は、このように変化してしまった理由を解明しておくことに掛っているような気がした。 このため、牽引力特性の測定は中止した。
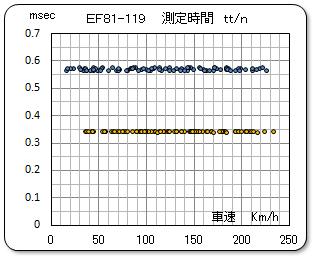
なお、一回当たりの測定時間 tt/n を計算したグラフを上右に示す。 この測定時間は通過スピードによって影響されないのは当然であるが、3個のデータ測定から5個のデータ測定に増加したために、測定時間は測定個数に比例して増えている事が分かる。 しかし、測定回数がおよそ 500〜3,000 回にも及ぶため、平均値をとるこのような測定には影響ないものと判断している。
次回は、スリップ率の測定不良に対して、検討してみよう。