
HOME >> 鉄道模型実験室 目次 Part 1 Part 2 Part 3
鉄道模型実験室 その22
- ■ Arduino Nano Every のPWMキャリア周波数を20kHzにする (2020/4/6)
 20kHz化の方法について、先回に引き続き調べてみると色々な事が分かりましたので、今度は2020/4/3のブログ「ArduinoのPWMキャリア周波数を20KHzにする」の説明を補足します。
20kHz化の方法について、先回に引き続き調べてみると色々な事が分かりましたので、今度は2020/4/3のブログ「ArduinoのPWMキャリア周波数を20KHzにする」の説明を補足します。- ■ Arduino Uno のPWMキャリア周波数を20kHzにする (2020/4/4)
 別室のブログにて、同じテーマで実施方法を報告しました。 しかしその内容は、こうしたら出来ましたという単なる ノウハウ として報告しました。 でも、なぜこうすれば出来たのか? それぞれの設定値はどんな意味があるのか? など、ノウホワイ? の部分について、自分が理解した内容に沿って記録しておくことにしました。
別室のブログにて、同じテーマで実施方法を報告しました。 しかしその内容は、こうしたら出来ましたという単なる ノウハウ として報告しました。 でも、なぜこうすれば出来たのか? それぞれの設定値はどんな意味があるのか? など、ノウホワイ? の部分について、自分が理解した内容に沿って記録しておくことにしました。- ■ モータドライバBD6211FのVREF制御モードを実験 (2020/3/8)
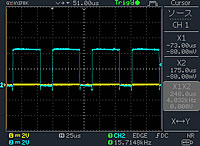
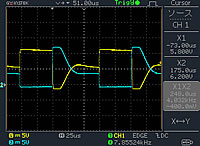
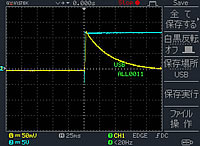
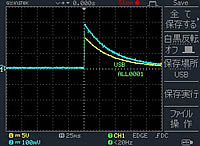
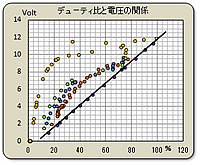
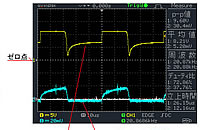
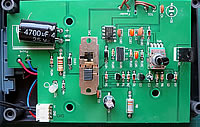
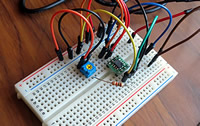 ROHM社のHブリッジドライバーシリーズのBD6211を使って、VREF制御モードを実験しました。このVREF 制御モード機能を使用すると、可聴域外の高周波 発振機能を持たないコンピュータであってもPWM制御が出来るので、その確認のために実験したのです。
ROHM社のHブリッジドライバーシリーズのBD6211を使って、VREF制御モードを実験しました。このVREF 制御モード機能を使用すると、可聴域外の高周波 発振機能を持たないコンピュータであってもPWM制御が出来るので、その確認のために実験したのです。- ■ モータドライバのPWM波形を観察する (その3) (2020/3/6)
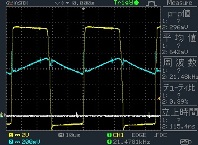
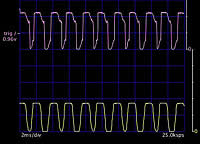
 他のモータドライバを使うために、そのPWM波形を観察することにしました。 ROHM社のHブリッジドライバーシリーズのBD6211と、東芝製のTB6612で、このドライバは我が卓上レイアウトには充分適応できることが分かりました。
他のモータドライバを使うために、そのPWM波形を観察することにしました。 ROHM社のHブリッジドライバーシリーズのBD6211と、東芝製のTB6612で、このドライバは我が卓上レイアウトには充分適応できることが分かりました。
鉄道模型実験室 その21
- ■ モータドライバTB6643KQのPWM波形を観察する (その2) (2020/3/5)
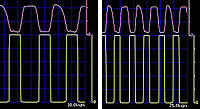
 東芝製モータドライバTB6643KQのPWM波形を観察した結果、その様子を知る事ができたのですが、さて、高周波での制御を実施するにはどうすればよいのか、素人ながら、あれこれいじってみました。 しかし、結局はこの石の使用を諦めることにしました。
東芝製モータドライバTB6643KQのPWM波形を観察した結果、その様子を知る事ができたのですが、さて、高周波での制御を実施するにはどうすればよいのか、素人ながら、あれこれいじってみました。 しかし、結局はこの石の使用を諦めることにしました。- ■ モータドライバTB6643KQのPWM波形を観察する (その1) (2020/3/5)
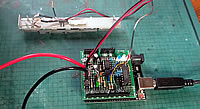
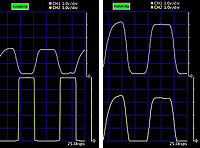
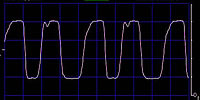
 Arduino Nano Every で出力されたおよそ16KHz のPWM 出力に対して、Bトレの動力車が反応しないトラブルに遭遇した。そこで、簡単な実験装置を組んで波形を観察することにした。
Arduino Nano Every で出力されたおよそ16KHz のPWM 出力に対して、Bトレの動力車が反応しないトラブルに遭遇した。そこで、簡単な実験装置を組んで波形を観察することにした。- ■ Arduino Nano Every のPWM周波数をアップする (2020/3/3)
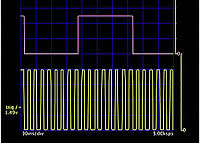
 PWM制御の周波数が約 1KHz と低いため、動きがぎごちなく感じられますし、ピーという音も気になりますので、このPWM周波数を20KHz近くまでアップさせることに挑戦しました。 結果はうまく行きましたが、新たな問題も出てきました。
PWM制御の周波数が約 1KHz と低いため、動きがぎごちなく感じられますし、ピーという音も気になりますので、このPWM周波数を20KHz近くまでアップさせることに挑戦しました。 結果はうまく行きましたが、新たな問題も出てきました。 - ■ Arduino Nano Every のPWM出力を調べる (2020/2/22)
 卓上レイアウトで楽しもう 自動運転 その21で、給電制御を実施していたモータドライバを焼いてしまった。 そこで、今までの方法を諦めて新しいモータドライバを使ってみることにした。
卓上レイアウトで楽しもう 自動運転 その21で、給電制御を実施していたモータドライバを焼いてしまった。 そこで、今までの方法を諦めて新しいモータドライバを使ってみることにした。- ■ PWM制御のコントローラとコンデンサの関係 (2020/1/12)
 卓上レイアウトで楽しもう 自動運転 その13-2では、モータドライバユニットと、PWM 制御式のパワーユニットの相性は合わないので使用出来ません、とオシロでの確認なしに結論していました。 そこで、波形観察より、実際の様子を見ることにしました。
卓上レイアウトで楽しもう 自動運転 その13-2では、モータドライバユニットと、PWM 制御式のパワーユニットの相性は合わないので使用出来ません、とオシロでの確認なしに結論していました。 そこで、波形観察より、実際の様子を見ることにしました。
鉄道模型実験室 その20
- ■ ポイント駆動回路の検討 その2 (2019/1/25)
 登山鉄道の新自動運転システムにおいて運行不具合の対応状況を報告した。しかし問題となったポイント駆動回路について、自分としてはまだ理解が不充分であることを知ったので、自分なりに納得できるようにいろいろ実験をしてみることにした。 今回は、素朴な疑問点に対して、実験で確かめることにしよう。
登山鉄道の新自動運転システムにおいて運行不具合の対応状況を報告した。しかし問題となったポイント駆動回路について、自分としてはまだ理解が不充分であることを知ったので、自分なりに納得できるようにいろいろ実験をしてみることにした。 今回は、素朴な疑問点に対して、実験で確かめることにしよう。- ■ ポイント駆動回路の検討 その1 (2019/1/24)
 登山鉄道の新自動運転システムにおいて運行不具合の対応状況を報告した。しかし問題となったポイント駆動回路について、自分としてはまだ理解が不充分であることを知った。そこで、自分なりに納得できるようにいろいろ実験をしてみることにした。
登山鉄道の新自動運転システムにおいて運行不具合の対応状況を報告した。しかし問題となったポイント駆動回路について、自分としてはまだ理解が不充分であることを知った。そこで、自分なりに納得できるようにいろいろ実験をしてみることにした。- ■ 伝達機構ギヤ部への注油の影響 (2018/7/11)
 動力伝達機構部への注油によって、ギヤ類の摩擦抵抗が減少するはずであるが、その結果として性能特性にどのように影響するのかを調べてみた。
動力伝達機構部への注油によって、ギヤ類の摩擦抵抗が減少するはずであるが、その結果として性能特性にどのように影響するのかを調べてみた。- ■ TOMIXの自動運転ユニットNを調べる その3 (2017/8/28)
 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってフィーダー回路の出力波形を調べてみた。
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってフィーダー回路の出力波形を調べてみた。- ■ TOMIXの自動運転ユニットNを調べる その2 (2017/8/27)
 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってポイント駆動回路の出力波形を調べてみた。
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってポイント駆動回路の出力波形を調べてみた。- ■ TOMIXの自動運転ユニットNを調べる その1 (2017/8/26)
 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。今回は、まず分解調査から実施した。
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。今回は、まず分解調査から実施した。- ■ ポイント駆動回路のコンデンサー容量をアップさせる (2017/7/27)
 登山鉄道自動運転システムにおいて、ポイントの作動が不安定な状態がたびたび発生していた。 そこで駆動回路の電圧波形を観察した結果、我が設計のポイント駆動回路ではパワー不足の可能性があると判断し、コンデンサの容量アップによるパワーアップの検討を実施した。
登山鉄道自動運転システムにおいて、ポイントの作動が不安定な状態がたびたび発生していた。 そこで駆動回路の電圧波形を観察した結果、我が設計のポイント駆動回路ではパワー不足の可能性があると判断し、コンデンサの容量アップによるパワーアップの検討を実施した。- ■ TOMIX製ユニットのポイント駆動回路出力波形の観察 (2017/7/23)
 駆動回路の電圧波形の観察により、我が設計のポイント駆動回路は、TOMIX製のパワーユニットのパワーよりも、倍以上も小さいことが判明した。 ポイントの作動が不安定な現象は、駆動回路のパワー不足の可能性があると判断し、パワーユニットでの出力波形を観察することにした。
駆動回路の電圧波形の観察により、我が設計のポイント駆動回路は、TOMIX製のパワーユニットのパワーよりも、倍以上も小さいことが判明した。 ポイントの作動が不安定な現象は、駆動回路のパワー不足の可能性があると判断し、パワーユニットでの出力波形を観察することにした。- ■ KATO製とTOMIX製の最新式C11型の性能比較 (2017/4/17)
 奇しくもほぼ同時発売となった、KATO製とTOMIX製の最新式C11型蒸気機関車の性能比較を実施してみよう。
奇しくもほぼ同時発売となった、KATO製とTOMIX製の最新式C11型蒸気機関車の性能比較を実施してみよう。- ■ PWM制御と手作り室内灯 (2017/4/13)
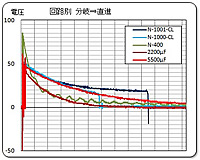
 本当にコンデンサの取り付け位置の問題なのかの確認と、PWM制御に影響を与えないコンデンサ容量はどれくらいかを実験してみることにする。
本当にコンデンサの取り付け位置の問題なのかの確認と、PWM制御に影響を与えないコンデンサ容量はどれくらいかを実験してみることにする。- ■ PWM制御とコアレスモータと室内灯の三つ巴 (2017/4/12)
 レイアウトにてこのC11-325号機を使って旧型客車を牽引させようとした時、さらに室内灯も関係することに気付いた。PWM制御方式のパワーパックとコアレスモータ搭載の動力車の関係は、さらに室内灯も関係する三つ巴の状態を考慮しなければならない様相となった。
レイアウトにてこのC11-325号機を使って旧型客車を牽引させようとした時、さらに室内灯も関係することに気付いた。PWM制御方式のパワーパックとコアレスモータ搭載の動力車の関係は、さらに室内灯も関係する三つ巴の状態を考慮しなければならない様相となった。
鉄道模型実験室 その19
- ■ TOMIX製のC11-325号機の性能特性 (2017/4/2)
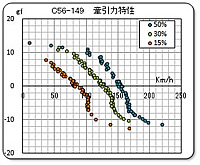
 TOMIX製のC11-325号機がやっと発売された。 そこで早速性能特性を測定してみたので報告する。 同じメーカーの動力車とパワーユニットの組み合わせで測定したのだ。 きっと満足できる性能を発揮してくれると期待して!
TOMIX製のC11-325号機がやっと発売された。 そこで早速性能特性を測定してみたので報告する。 同じメーカーの動力車とパワーユニットの組み合わせで測定したのだ。 きっと満足できる性能を発揮してくれると期待して!- ■ パワーユニットを知ろう KATOのC56とPWM制御 (2017/2/17)
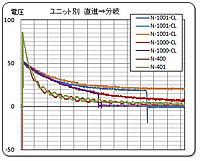
 パワーユニットを知ろうの第10弾として、TOMIX製パワーユニットN-1001-CL を使って動力車を走らせた場合の特性を測定することにした。
パワーユニットを知ろうの第10弾として、TOMIX製パワーユニットN-1001-CL を使って動力車を走らせた場合の特性を測定することにした。- ■ パワーユニットを知ろう PWM制御とコアレスモータ その2 (2017/2/4)
 パワーユニットを知ろう の第9弾として、TOMIX製パワーユニットN-1001-CL を使った場合のコアレスモータの特性を解析してみた。 その結果、自分なりの屁理屈をまとめてみて、何だか理解出来たような気がしたので、ここに報告する。
パワーユニットを知ろう の第9弾として、TOMIX製パワーユニットN-1001-CL を使った場合のコアレスモータの特性を解析してみた。 その結果、自分なりの屁理屈をまとめてみて、何だか理解出来たような気がしたので、ここに報告する。- ■ パワーユニットを知ろう PWM制御とコアレスモータ (2017/2/3)
 パワーユニットを知ろう の第8弾として、TOMIX製パワーユニットN-1001-CL を使ってコアレスモータの特性を測定した。 PWM制御とコアレスモータは相性が悪いと言われていたが、測定データにも今までとは異なった様相を呈しており、その動きを理解するのに四苦八苦している。
パワーユニットを知ろう の第8弾として、TOMIX製パワーユニットN-1001-CL を使ってコアレスモータの特性を測定した。 PWM制御とコアレスモータは相性が悪いと言われていたが、測定データにも今までとは異なった様相を呈しており、その動きを理解するのに四苦八苦している。- ■ パワーユニットを知ろう PWM制御とコアレスモータ 波形観察 (2017/1/31)
 パワーユニットを知ろう の第7弾として、TOMIX製パワーユニットN-1001-CL を使って、コアレスモータを駆動してみた。PWM制御とコアレスモータは相性が悪いと言われていたが、実際にはどうなのかを波形観察から見てみることにしょう。
パワーユニットを知ろう の第7弾として、TOMIX製パワーユニットN-1001-CL を使って、コアレスモータを駆動してみた。PWM制御とコアレスモータは相性が悪いと言われていたが、実際にはどうなのかを波形観察から見てみることにしょう。- ■ パワーユニットを知ろう TOMIX製パワーユニットN-1001-CL の分解 (2017/1/21)
 パワーユニットを知ろう の第6弾として、TOMIX製パワーユニットN-1001-CL を分解し、フリーホイールダイオードがどのように実装されてるのか確認してみるkとにした。
パワーユニットを知ろう の第6弾として、TOMIX製パワーユニットN-1001-CL を分解し、フリーホイールダイオードがどのように実装されてるのか確認してみるkとにした。- ■ パワーユニットを知ろう 電圧と電流の波形 (2017/1/19)
 パワーユニットを知ろう の第5弾として、負荷状態におけるパワーユニットの電圧と電流の波形を調べることにした。 そして、逆起電力とフリーホール現象の違いを理解することが出来た。
パワーユニットを知ろう の第5弾として、負荷状態におけるパワーユニットの電圧と電流の波形を調べることにした。 そして、逆起電力とフリーホール現象の違いを理解することが出来た。- ■ パワーユニットを知ろう TOMIXのパワーユニット N-1001-CL (2017/1/15)
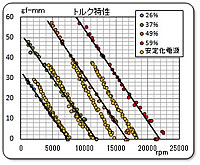 パワーユニットを知ろう の第4弾として、TOMIX 製のパワーユニット N-1001-CL のトルク特性を調べることにした。
パワーユニットを知ろう の第4弾として、TOMIX 製のパワーユニット N-1001-CL のトルク特性を調べることにした。- ■ パワーユニットを知ろう TOMIXのパワーユニット N-1001-CL (2017/1/10)
 パワーユニットを知ろう の第3弾として、
パワーユニットを知ろう の第3弾として、
TOMIX 製のパワーユニット N-1001-CL の速度特性を調べることにした。- ■ パワーユニットを知ろう TOMIXのパワーユニット (2017/1/9)
 パワーユニットを知ろう の第2弾として、
パワーユニットを知ろう の第2弾として、
2種類のTOMIX 製のパワーユニットを調べた。 測定環境は前回と同じ状態で測定する。- ■ パワーユニットを知ろう KATOのスタンダードS (2017/1/8)
 KATO製のパワーパック Standsrd S は、交流アダプター(AC - AC ADAPTOR)を使用して全波整流したままのパワーユニットであることが分かった。 このため、その脈動成分はしっかりと残っており、我がドクターカーとは全く相性が合わないことも納得である。
KATO製のパワーパック Standsrd S は、交流アダプター(AC - AC ADAPTOR)を使用して全波整流したままのパワーユニットであることが分かった。 このため、その脈動成分はしっかりと残っており、我がドクターカーとは全く相性が合わないことも納得である。
鉄道模型実験室 その18
- ■ XBeeを搭載したドクターカー その4 内回り線を測定する (2016/12/27)
 先回は外回り線を測定したので、今回は内周り線を測定することにした。 さらに、処理ソフトの改善と、KATO 製のパワーユニットを使用した場合でもチェックしてみたが、思わぬ結果になってしまった。
先回は外回り線を測定したので、今回は内周り線を測定することにした。 さらに、処理ソフトの改善と、KATO 製のパワーユニットを使用した場合でもチェックしてみたが、思わぬ結果になってしまった。- ■ XBeeを搭載したドクターカー その3 レイアウトでの測定 (2016/12/24)
 いよいよ無線通信モジュール XBee を搭載したドクターカーを使って、実際のレイアウトを走行させてみた。 その結果を報告する。
いよいよ無線通信モジュール XBee を搭載したドクターカーを使って、実際のレイアウトを走行させてみた。 その結果を報告する。- ■ Arduino のタイマーは正確だった (2016/12/22)
 先回報告した中で、時刻計測におけるタイマーの値に疑問があり、Arduino のタイマー処理を疑っていたが、その後の検討結果、自分の考察は間違いであり、疑っていたArduino のタイマー処理は正確であったことが判明した。 その結論に至った経緯を説明しよう。
先回報告した中で、時刻計測におけるタイマーの値に疑問があり、Arduino のタイマー処理を疑っていたが、その後の検討結果、自分の考察は間違いであり、疑っていたArduino のタイマー処理は正確であったことが判明した。 その結論に至った経緯を説明しよう。- ■ XBeeを搭載したドクターカー その1 (2016/12/18)
 無線通信モジュール XBee を使用してモータ端子電圧のデータをパソコンに飛ばし、パソコンにて処理する方法が考えられる。 このXBee の使用に関しては既に経験済みであるが、線路の位置データをどうやって取得するのかも問題であっ。 今回はこのテーマに挑戦することにた。
無線通信モジュール XBee を使用してモータ端子電圧のデータをパソコンに飛ばし、パソコンにて処理する方法が考えられる。 このXBee の使用に関しては既に経験済みであるが、線路の位置データをどうやって取得するのかも問題であっ。 今回はこのテーマに挑戦することにた。- ■ ドクターカーを作ろう (2016/12/8)
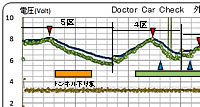
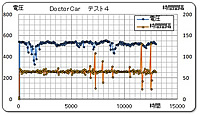
 レイアウトの給電状態や線路の汚れをチェックできるドクターカーを作った。これは走行中の車両に電圧計を搭載して、その電圧をチェックしようとするものである。
レイアウトの給電状態や線路の汚れをチェックできるドクターカーを作った。これは走行中の車両に電圧計を搭載して、その電圧をチェックしようとするものである。- ■ モータ特性を測定しよう その11 コアレスモータ (2016/11/10)
 本命としていたボールベアリングを使った測定装置が上々でしたので、いよいよ目的のコアレスモータの測定にチャレンジし、念願のコアレスモータの特性をバッチリと測定することが出来た。 そしてその製造品質の高さも予感することが出来た。 さらに、我がホビーでの測定技術もまんざらではないかと自負している。
本命としていたボールベアリングを使った測定装置が上々でしたので、いよいよ目的のコアレスモータの測定にチャレンジし、念願のコアレスモータの特性をバッチリと測定することが出来た。 そしてその製造品質の高さも予感することが出来た。 さらに、我がホビーでの測定技術もまんざらではないかと自負している。
- ■ モータ特性を測定しよう その10 ボールベアリングを使う (2016/11/7)
 やっと本命としていたボールベアリングが届いたので、早速その工作を実施したのでその効果を報告する。 その結果は上々であり、フライホイール方式でもブレーキ方式でも、どちらも信用できる測定法であることの確信も得た。
やっと本命としていたボールベアリングが届いたので、早速その工作を実施したのでその効果を報告する。 その結果は上々であり、フライホイール方式でもブレーキ方式でも、どちらも信用できる測定法であることの確信も得た。- ■ モータ特性を測定しよう その9 反力を利用しよう (2016/11/5)
 先回の失敗を乗り越えて、新たな方法に取り組んだが・・・・・・・。
先回の失敗を乗り越えて、新たな方法に取り組んだが・・・・・・・。
鉄道模型実験室 その17
- ■ モータ特性を測定しよう その8 フライホイール無しモータのために (2016/10/30)
 張力プーリーの摩擦トルクが問題外の結果であったので、モータのフライホイール部を利用した測定法に変更した。 しかしフライホイールの無いモータでは、この方法では測定できないので、新たな工夫に挑戦するも・・・。
張力プーリーの摩擦トルクが問題外の結果であったので、モータのフライホイール部を利用した測定法に変更した。 しかしフライホイールの無いモータでは、この方法では測定できないので、新たな工夫に挑戦するも・・・。- ■ モータ特性を測定しよう その7 完成と今後の進め方 (2016/10/10)
 先回の実験で、いくつかの問題点も見えてきた。 そこで、これらの対策を実施し測定装置として使えるものが出来上がった。そしてその使い方を検討する
先回の実験で、いくつかの問題点も見えてきた。 そこで、これらの対策を実施し測定装置として使えるものが出来上がった。そしてその使い方を検討する- ■ モータ特性を測定しよう その6 機能テスト (2016/10/8)
 ロードセルの機能チェックが合格したので、いよいよ我が測定器にセットしてテストを開始する。 まず初めに、トルク測定の校正を実施し、EF510-1号機のモータを使って特性の測定を実施した。 そしていくつかの問題点も見えてきた。
ロードセルの機能チェックが合格したので、いよいよ我が測定器にセットしてテストを開始する。 まず初めに、トルク測定の校正を実施し、EF510-1号機のモータを使って特性の測定を実施した。 そしていくつかの問題点も見えてきた。- ■ モータ特性を測定しよう その5 ロードセル (2016/10/5)
 注文していロードセルがやっと手に入ったので早速工作に取り掛かった。 そしてArduino を使って校正も実施したが、非常に満足できる結果を得た。
注文していロードセルがやっと手に入ったので早速工作に取り掛かった。 そしてArduino を使って校正も実施したが、非常に満足できる結果を得た。- ■ スマホの傾斜計アプリを使う (2016/10/2)
 先日、ある方の鉄道模型のサイトを閲覧している時に不思議な傾斜計を見つけた。 よく見ると見覚えのある形の測定器なのである・・・・・。 スマホだ! そうなのだスマホのアプリなのである。 そこでアプリの検索を実施したら、有る有る!
先日、ある方の鉄道模型のサイトを閲覧している時に不思議な傾斜計を見つけた。 よく見ると見覚えのある形の測定器なのである・・・・・。 スマホだ! そうなのだスマホのアプリなのである。 そこでアプリの検索を実施したら、有る有る!- ■ モータ特性を測定しよう その4 拡大レバー部 (2016/9/25)
 色々な予備実験の結果をもとに、測定装置の仕様を決めて、測定可能な装置として仕上げることにする。
色々な予備実験の結果をもとに、測定装置の仕様を決めて、測定可能な装置として仕上げることにする。- ■ モータ特性を測定しよう その3 トルク測定部 (2016/9/22)
 先回に引き続き、トルク測定部の検討結果を紹介しよう。 今回は、当初のアイディアに従って、トルク測定部の構成を検討したので紹介しよう。
先回に引き続き、トルク測定部の検討結果を紹介しよう。 今回は、当初のアイディアに従って、トルク測定部の構成を検討したので紹介しよう。- ■ モータ特性を測定しよう その2 負荷方法 (2016/9/21)
 先回に引き続き、トルク測定部の検討結果を紹介しよう。 まず最初に以前トライしたモータを使用した方法について、再検討してみた。
先回に引き続き、トルク測定部の検討結果を紹介しよう。 まず最初に以前トライしたモータを使用した方法について、再検討してみた。- ■ モータ特性を測定しよう その1 構想とセンサー (2016/9/20)
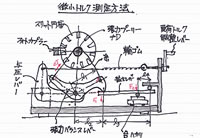 以前から宿題にしていた モータの特性を自動測定しようと言うテーマに取り掛かることにした。 まず、微小トルクを測定する方法から検討を始めた。
以前から宿題にしていた モータの特性を自動測定しようと言うテーマに取り掛かることにした。 まず、微小トルクを測定する方法から検討を始めた。
鉄道模型実験室 その16
- ■ バイナリカウンタの動作解析と対策 (2016/6/29)
 新しく制作したモータ無負荷回転特性の測定用シールドの不可思議な現象について、読者の方からアドバイスを頂いた。 このような問題に対しての攻め方については五里霧中の小生にとって、貴重な指針となりました。 そして見事その対策が出来ましたので報告いたします。
新しく制作したモータ無負荷回転特性の測定用シールドの不可思議な現象について、読者の方からアドバイスを頂いた。 このような問題に対しての攻め方については五里霧中の小生にとって、貴重な指針となりました。 そして見事その対策が出来ましたので報告いたします。- ■ バイナリカウンタの動作を観察する (2016/6/23)
 モータの無負荷回転特性を測定した結果と動力特性を測定する測定台での測定結果とが合致しない件について、その後のモハ102-81号車の測定においても、同様な現象が起きていた。 その調査を実施した。
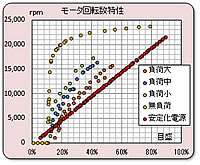
モータの無負荷回転特性を測定した結果と動力特性を測定する測定台での測定結果とが合致しない件について、その後のモハ102-81号車の測定においても、同様な現象が起きていた。 その調査を実施した。- ■ モータの無負荷回転特性を測定する (2016/6/16)
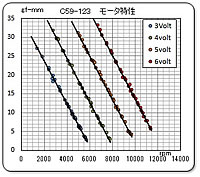
 モータ単体の特性を測定する専用の測定装置を作ってみた。
モータ単体の特性を測定する専用の測定装置を作ってみた。- ■ 電車形動力車の動力特性の測定を始める (2016/6/3)
 今まで、動力車の動力特性を測定してきたが、その対象を電車形のモデルにも広げることにした。 まず最初にJR東海の313系モデルを取り上げた。
今まで、動力車の動力特性を測定してきたが、その対象を電車形のモデルにも広げることにした。 まず最初にJR東海の313系モデルを取り上げた。- ■ 速報! C50の特性を測定する (2016/4/27)
 本日、KATOのNゲージ生誕50周年記念のC50形蒸気機関車が送られてきた。 手に取って細かい細工を観察したのち、早々と性能測定台に載せてしまった。 その結果を速報として報告しよう。
本日、KATOのNゲージ生誕50周年記念のC50形蒸気機関車が送られてきた。 手に取って細かい細工を観察したのち、早々と性能測定台に載せてしまった。 その結果を速報として報告しよう。- ■ 使いながらの小改善 (2016/2/27)
 今回のプロジェクトにより完成して新しい測定システムを使って、未測定であるいろいろなモデルを順次測定している。その中で、いくつかの改善を施しながら進めたのでここに記録して置く事にする。
今回のプロジェクトにより完成して新しい測定システムを使って、未測定であるいろいろなモデルを順次測定している。その中で、いくつかの改善を施しながら進めたのでここに記録して置く事にする。 - ■ プリアンプ改良後の走行試験 (2016/2/20)
 回転数検出部のプリアンプ回路を修正したので、確認のために、動力車の性能測定を実施した。 その結果、正常に作動している事が確認出来た。
回転数検出部のプリアンプ回路を修正したので、確認のために、動力車の性能測定を実施した。 その結果、正常に作動している事が確認出来た。- ■ 回転数検出部のプリアンプ回路について (2016/2/17)
 どうしても、回転数検出部のプリアンプ回路が気になっているので、再検討を実施した。 最初にフォトリフレクタ素子の特性を調査し、それに対応する回路を検討した。 そして貴重なアドバイスを頂いて、簡単な方法で実施できる手を教わった。
どうしても、回転数検出部のプリアンプ回路が気になっているので、再検討を実施した。 最初にフォトリフレクタ素子の特性を調査し、それに対応する回路を検討した。 そして貴重なアドバイスを頂いて、簡単な方法で実施できる手を教わった。- ■ 走行試験の実施 (2016/2/16)
 まだ、問題があるものの、測定装置側の準備が出来たので、実際に動力車を走らせて測定を実施し、問題点を洗い出すことにした。
まだ、問題があるものの、測定装置側の準備が出来たので、実際に動力車を走らせて測定を実施し、問題点を洗い出すことにした。
鉄道模型実験室 その15
- ■ パルス波形の観察 (2016/2/15)
 スリップ率の測定に対して疑問点が有ったので、その原因を調査して対策案を検討した。 そのために、パルス波形を観察することにした。
スリップ率の測定に対して疑問点が有ったので、その原因を調査して対策案を検討した。 そのために、パルス波形を観察することにした。- ■ 回路定数の校正とテスト走行 (2016/2/14)
 このレポートで実験室の報告が100回目となることに気が付いた。 今回が記念する100回目としよう。 さて、先回に続き、新しく工作した電圧測定部の校正とテスト走行結果を報告することにしよう。
このレポートで実験室の報告が100回目となることに気が付いた。 今回が記念する100回目としよう。 さて、先回に続き、新しく工作した電圧測定部の校正とテスト走行結果を報告することにしよう。- ■ 電源供給ラインの改善 (2016/2/10)
 今回のプロジェクトも目途が立ってきたが、電源供給ラインの電圧降下の問題が残っていた。 その改善を進めてきたが、四苦八苦している状況である。
今回のプロジェクトも目途が立ってきたが、電源供給ラインの電圧降下の問題が残っていた。 その改善を進めてきたが、四苦八苦している状況である。- ■ 試験走行によるシステムの確認 (2016/2/3)
 各部の機能チェックとデータ計測のための校正作業も完了したので、いよいよシステムの頭脳を挿入して試験走行を実施し、システムの機能を確認する。
各部の機能チェックとデータ計測のための校正作業も完了したので、いよいよシステムの頭脳を挿入して試験走行を実施し、システムの機能を確認する。- ■ 試験走行のための準備 (2016/2/2)
 今回の工作によって修正工作した部分や新しく工作した部分があるので、これらの機能テストと測定数値の校正を実施する。
今回の工作によって修正工作した部分や新しく工作した部分があるので、これらの機能テストと測定数値の校正を実施する。- ■ 有線通信のための信号ユニットを作る (2016/2/2)
 先回は有線通信線の配線を支える支柱と竿の工作を報告した。 当初の思惑どうりに機能することが確認できたので、その信号処理を実施する回路と配線工作を実施した。
先回は有線通信線の配線を支える支柱と竿の工作を報告した。 当初の思惑どうりに機能することが確認できたので、その信号処理を実施する回路と配線工作を実施した。- ■ 有線通信線のための支柱と竿の工作 (2016/1/25)
 自動運転のための制御ユニットが完成したので、今回のテーマである有線通信線の配線を支える支柱と竿の工作を実施した。 当初の思惑道理に機能してくれくか一抹の不安があったものの、結果はすこぶる良好であった。
自動運転のための制御ユニットが完成したので、今回のテーマである有線通信線の配線を支える支柱と竿の工作を実施した。 当初の思惑道理に機能してくれくか一抹の不安があったものの、結果はすこぶる良好であった。- ■ 自動運転制御ユニットのテスト (2016/1/24)
 ポイント駆動ユニットの機能が確認できたので、いよいよ測定台にセットしてテストを実施することにした。
ポイント駆動ユニットの機能が確認できたので、いよいよ測定台にセットしてテストを実施することにした。- ■ コンデンサ方式のポイント駆動ユニット (2016/1/23)
 ポイント駆動ユニットの構成を、モータドライバIC方式からコンデンサ方式に変更することにしたが、注文していた部品が届いたので早速工作を実施した。
ポイント駆動ユニットの構成を、モータドライバIC方式からコンデンサ方式に変更することにしたが、注文していた部品が届いたので早速工作を実施した。- ■ ポイント駆動ユニットの電圧波形 (2016/1/22)
 モータドライバICを使った回路では、二つのポイントを同時に駆動することが出来なかった。 そこでその駆動ユニットの電圧状態を簡易オシロで観察したので報告する。
モータドライバICを使った回路では、二つのポイントを同時に駆動することが出来なかった。 そこでその駆動ユニットの電圧状態を簡易オシロで観察したので報告する。
鉄道模型実験室 その14
- ■ 木工工作の実施 (2016/1/20)
 測定台の改造を実施し、システムを構成した。 しかし、自動運転制御ユニットのテストを実施するも、3/4個のポイントが応答してくれなかった。
測定台の改造を実施し、システムを構成した。 しかし、自動運転制御ユニットのテストを実施するも、3/4個のポイントが応答してくれなかった。- ■ 制御回路用のシールドを作る (2016/1/18)
 280-30の電動ポイントを入手してモータドライバICでの作動が確認できたので、モータドライバIC方式によるシールドを作成した。
280-30の電動ポイントを入手してモータドライバICでの作動が確認できたので、モータドライバIC方式によるシールドを作成した。- ■ 新測定法のための自動運転制御システム (2016/1/8)
 必要な要素が揃ったので、制御システムの組立てと制御ソフトを検討した。ブレッドボード上ではあるがシステムは正常に作動することが確認できた。
必要な要素が揃ったので、制御システムの組立てと制御ソフトを検討した。ブレッドボード上ではあるがシステムは正常に作動することが確認できた。- ■ ポイントの切替駆動の制御方法 (2016/1/6)
 次にポイントの切替駆動する方法方法を検討した。 モータドライバICやコンデンサ駆動を実験した。
次にポイントの切替駆動する方法方法を検討した。 モータドライバICやコンデンサ駆動を実験した。- ■ 自動運転システムのセンサー (2016/1/4)
 自動運転システムに使用するセンサーとして、TOMIX のTCSワンタッチ装着センサーと、Cdsセルを使った方法をを検討した。
自動運転システムに使用するセンサーとして、TOMIX のTCSワンタッチ装着センサーと、Cdsセルを使った方法をを検討した。- ■ 自動運転制御のテスト (2016/1/3)
 この方法での実現に向けて試行錯誤を続けてきたが、やっとその目途を付けることが出来たので、その結果を報告することにする。
この方法での実現に向けて試行錯誤を続けてきたが、やっとその目途を付けることが出来たので、その結果を報告することにする。- ■ 新しい測定方法での自動運転制御 (2015/12/19)
 新しい測定方法を検討したが、最終的にはNo.14 の自動制御運転を取り入れた 小判型+8字パターンに落ち着いた。その運転制御方法も検討したのでここで報告しよう。
新しい測定方法を検討したが、最終的にはNo.14 の自動制御運転を取り入れた 小判型+8字パターンに落ち着いた。その運転制御方法も検討したのでここで報告しよう。- ■ 新しい測定方法を検討する (2015/12/19)
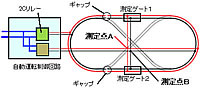
 測定車両はコンパクト化したとは言え、大袈裟の装置となっている。 また、センサーからの配線もぐるぐる巻きであったが、ふと浮かんだアイディアが8字レイアウトである。ポイントは、有線通信が可能であることである。
測定車両はコンパクト化したとは言え、大袈裟の装置となっている。 また、センサーからの配線もぐるぐる巻きであったが、ふと浮かんだアイディアが8字レイアウトである。ポイントは、有線通信が可能であることである。
鉄道模型実験室 その13
- ■ 新しい測定車を作る その2 (2015/9/25)
 新しい測定車が出来あがったので、実際に測定を実施することにした。 車両はKATO のC57-195 号機で最新モデルであり、性能データも上々の車両なので期待して測定を開始した。
新しい測定車が出来あがったので、実際に測定を実施することにした。 車両はKATO のC57-195 号機で最新モデルであり、性能データも上々の車両なので期待して測定を開始した。- ■ 新しい測定車を作る その1 (2015/9/24)
 先回のSL測定時に、曲線走行時に度々脱線することがあった。 そこで、このセンサー回路の連結部の改善と共に、全体をもう少しコンパクトにするアイディアも検討すつことにした。
先回のSL測定時に、曲線走行時に度々脱線することがあった。 そこで、このセンサー回路の連結部の改善と共に、全体をもう少しコンパクトにするアイディアも検討すつことにした。- ■ SLのモータ回転数を測定しよう その6 まとめ (2015/9/8)
 測定上の制約により、測定対象が限られてしまったが、蒸気機関車モデルでもモータ回転数を測定出来る事が分かった。
測定上の制約により、測定対象が限られてしまったが、蒸気機関車モデルでもモータ回転数を測定出来る事が分かった。- ■ SLのモータ回転数を測定しよう その5 C57-180号機の測定 (2015/9/4)
 いよいよ実際に車両を走らせて測定しても大丈夫であると言う確信が持てたので、C57-180号機を使って性能測定を実施した。 そして、満足のいくデータを得る事が出来た。
いよいよ実際に車両を走らせて測定しても大丈夫であると言う確信が持てたので、C57-180号機を使って性能測定を実施した。 そして、満足のいくデータを得る事が出来た。- ■ SLのモータ回転数を測定しよう その4 またも・・・・ (2015/9/3)
 先回までの対策で、当初の目的である “ SLのモータ回転数を測定しよう ” の実験に取り掛かる事ができるようになったと思ったが、またもやトラブルの続発であった。
先回までの対策で、当初の目的である “ SLのモータ回転数を測定しよう ” の実験に取り掛かる事ができるようになったと思ったが、またもやトラブルの続発であった。- ■ SLのモータ回転数を測定しよう その3 リモコン受光モジュールの取り換え
 (2015/8/28)
(2015/8/28)
注文していたリモコン受光モジュール RPM6938 を入手したので組付けを実施した。 また、ノイズ対策も実施することができた。- ■ SLのモータ回転数を測定しよう その2 リモコン受光ユニットの失敗
 (2015/8/17)
(2015/8/17)
大ポカのおかげで、 リモコン受光モジュールのカタログに記入されていない大切な機能を知ることが出来た。- ■ SLのモータ回転数を測定しよう その1 (2015/8/15)
 小型の反射型フォトセンサを使って設置場所の制約のある蒸気機関車のモータ回転数検知用に使ってみる事にした。
小型の反射型フォトセンサを使って設置場所の制約のある蒸気機関車のモータ回転数検知用に使ってみる事にした。
しかし、 単純なポカミスを犯してしまい、今回も右往左往の実験作業となってしまったが、そのおかげで、リモコン受光モジュールのカタログに記入されていない大切な機能を知ることが出来たのである。
![]()