
HOME >> 鉄道模型実験室 > モータの無負荷回転特性を測定する
鉄道模型実験室 No.108 モータの無負荷回転特性を測定する
■ はじめに
先回、「電車形動力車の動力特性の測定を始める」にて、電車形モデルの動力測定を始めた。 最初に313系のモハ 313-8 号車を、そして、クモハ 313-3020 号車、モハ E231-601 号車を測定した。 その中で、速度特性を測定中に、モータの回転を計測する誤差なのか、あるいは、モータ自身の速度のバラツキなのか判断に迷うケースに遭遇した。
このような問題に対しては、モータ単体の特性を測定しておけば、モータの発熱による特性の変化やこじれによる回転抵抗の変化などをチェックすることによって、原因推定の材料となるであろう。 このモータ特性の測定については、過去に実施したことがある。 「モータの速度特性の測定」などである。 そして、現在はこのような調査を中断しているが、その理由も「動力車の調査/目次」にて説明している。 小さなモータトルクを検出する電気的方法がまだ見つかっていないからです。
しかし、今回の問題は回転数と電圧の関係だけでも測定できれば参考になると判断し、専用の測定装置を作ってみることにした。
 .
.
■ モータの無負荷回転特性を測定する方法
モータの無負荷回転特性を測定する方法といっても簡単である。 先回まで実施してきた動力車測定を実施する前に、動力台車やジョイントを組み付ける前のモータだけを取り付けた状態にする。 そして、無負荷状態のモータを回転させて測定すれば良いのである。
回転センサは同じものが使えるが、車両を走行させるないので、測定処理回路は専用の装置が必要である。 モータを回転させるにはモータ端子電圧を測定する端子を使用して電圧を供給すればよい。
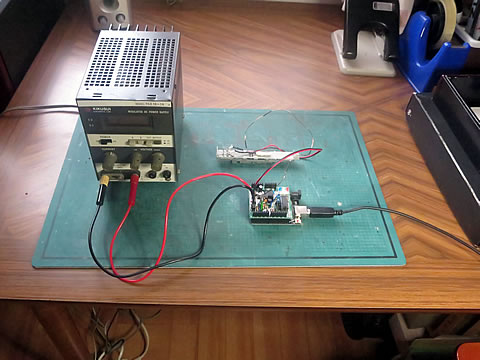
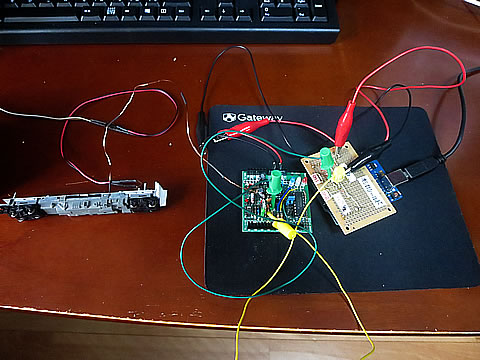
右の写真にその測定時の状態を示す。 電圧の供給はいつもの安定化電源を使用して電圧を変化させ、専用のシールドを取り付けたArduino によってデータ計測を行うのである。
問題は、どのタイミングで計測するかであるが、電圧をセットした状態でボタンを押すことによって、モータの端子電圧と電量、および回転数を計測して、パソコンにデータを送信する、きわめて単純なシーケンスでよいのである。
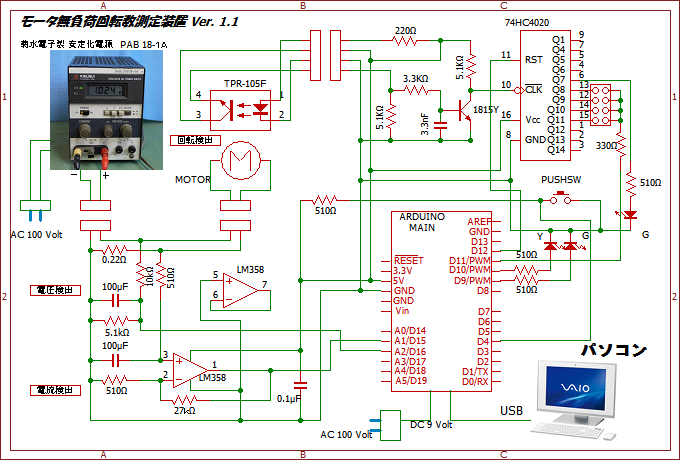
ここで、電圧と電流の計測は、「動力特性の測定の自動化 > システム構想と回路図」と同じ方法とすればよい。 モータ回転数の測定も「使いながらの小改善」などで改良した回路とする。
モータ回転数の測定ロジックについては、規定時間内でのパルス数をカウントするか、あるいは、規定回数までカウントする時間を測定する二つの方法があるが、今回はプログラムが単純な後者の方法を選択した。
この考えのもとで測定回路を検討した。 規定回数までカウントする回路として外付けのカウンターを設置する。 カウンタも使用経験のある4020のバイナリカウントとし、カウント回数を、128、256、512、1024 回に設定できるようにジャンパピンで選択できるようにした。 これは、1秒前後で計測完了になるように考慮したのである。
// Moter-rev 2016/6/10
// モータ回転測定の専用シールド用
#define CLR_PIN 12
#define FIN_PIN 11
#define LEDY_PIN 10
#define LEDG_PIN 9
#define START_PIN 2
#define vol_pin 2
#define cur_pin 1
void setup()
{
pinMode(CLR_PIN,OUTPUT);
pinMode(FIN_PIN,INPUT);
pinMode(LEDG_PIN,OUTPUT);
pinMode(LEDY_PIN,OUTPUT);
pinMode(START_PIN,INPUT);
Serial.begin(9600);
}
void loop()
{
int voltage;
int current;
unsigned long vol;
unsigned long cur;
unsigned long t1;
unsigned long t2;
unsigned long tt;
int n;
int start;
int fin;
vol = 0;
cur = 0;
n = 0;
digitalWrite(LEDG_PIN, HIGH);
digitalWrite(CLR_PIN, LOW); //回転数計測状態を確認
start = digitalRead(START_PIN) ;
while (start == HIGH) { // スタートボタンを待つ
start = digitalRead(START_PIN) ;
}
digitalWrite(CLR_PIN, HIGH);
digitalWrite(LEDY_PIN, HIGH);
delay(500);
digitalWrite(CLR_PIN, LOW); //測定開始
t1 = millis(); // 測定開始時刻
fin = digitalRead(FIN_PIN) ;
while (fin == LOW) { // カウント完了を待つ。
この間に電圧と電流を測定する
voltage = analogRead(vol_pin);
current = analogRead(cur_pin);
vol = vol + voltage;
cur = cur + current;
n = n + 1;
fin = digitalRead(FIN_PIN) ;
}
t2 = millis(); // カウント完了時刻
tt = t2 - t1;
String buf = String(vol)+","+String(cur)+","
+String(n)+","+String(tt)+ ",E";
Serial.println(buf);
digitalWrite(LEDY_PIN, LOW);
delay(500);
}
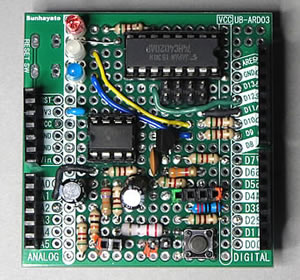
■ 専用シールドを作る
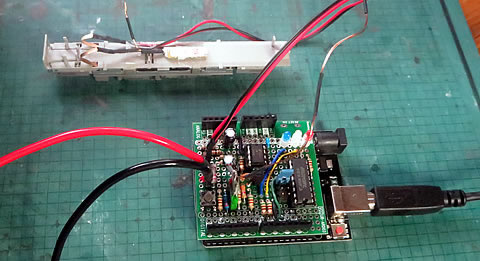
上記の回路に従って、専用のシールドを作成した。 Arduino は、最近マルツより発売されたArduino UNO R3互換ボード MABTB-UNO-R3 を使用した。
シールドはArduino用ユニバーサル基板 UB-ARD03-P を用いて回路を構成した。
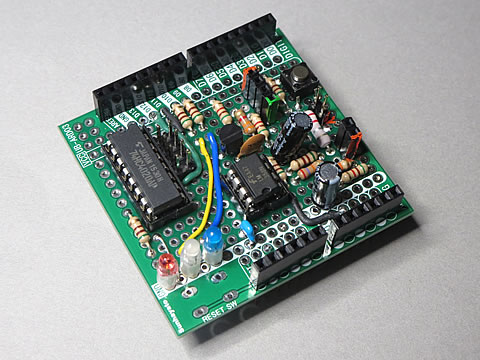
電源への接続はオスのピンヘッダを使い、モータへの接続と回転センサとの接続はメスのピンソケットを使用して、車両モデルでの測定端子と共通使用できるようにしている。
スケッチは、今までの例を参考にして右に示すように記述した。
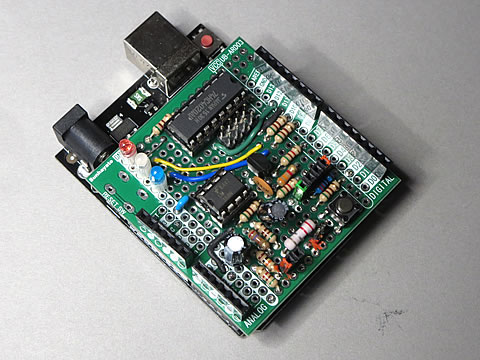
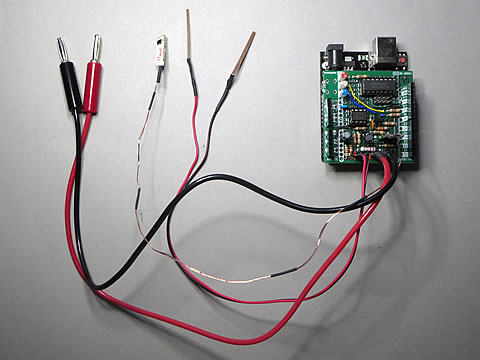
Arduino に装着した状態を上左に示す。 そして配線類を接続した状態を上右に示す。 なお、モータへの電力供給線は、50〜200mA程度を予想するので、0.2mm のポリウレタン線ではなくて、少し太めの専用線を作成した。
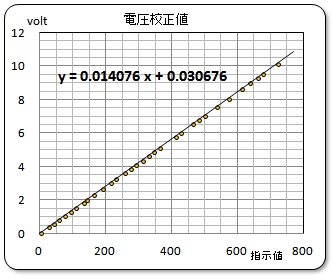
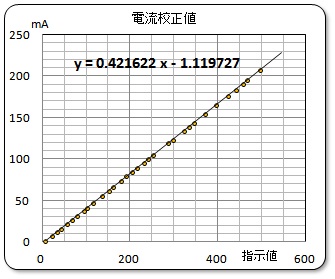
■ 電圧と電流の校正
いくつかの回路ミスがあったが、手直し後のテスト測定により正常に作動することが確認できた。 そこで、新しい回路ゆえに電圧と電流の校正を実施することにした。 回路の負荷は、安定した抵抗が得られるように固定抵抗とし、回路を流れる電流と電圧値をテスターで測定しながら、Arduino を走らせた。 そん時のテスト用のスケッチは、モータの回転数制御が不要なので、電圧と電流の測定を 1000 回実施してデータを送信するように単純化した。

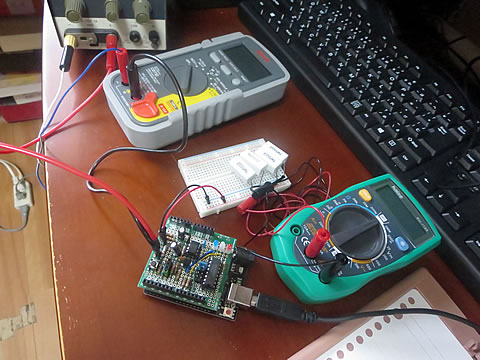
送信されたデータはシリアルモニタに表示させ、テスターの読みと合わせてメモを取りながら実施した。 その時の様子を上に示す。 固定抵抗は、50Ω 5W のセメント抵抗を4個使用してトータルで 50Ωとなるように直列&並列に接続した。
 .
.
その結果を上に示す。 線形性や測定範囲など問題無いものと判断した。
■ 測定の実施
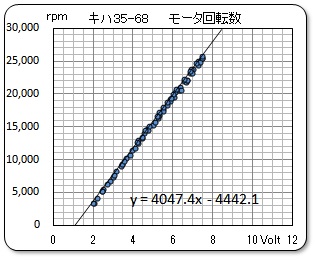
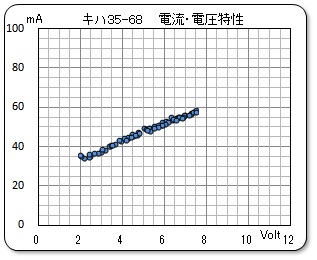
手始めに、測定を準備していたKATO製のキハ35系の動力ユニットを使って測定を実施した。 その様子を右に示し、測定データを下に示す。
回転数-電圧の勾配は、313系やE231系とは異なっている値を示しているが、これはモータの巻き線仕様などが異なっているいることを示しているのだろうか?
モータについてはずぶの素人なのでよく分からない・・・・・!
もしそうであれば、モデルごとにモータ仕様を変えていることになり、そこまで実施すのであろうか? 自分は外見が同じであれば、まずはほぼ同じ特性であろうと判断するのですが、細かい細工がしてあるのかな?
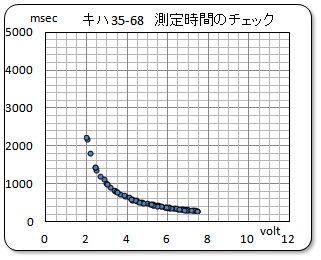
今回は、測定時間のチェックもしてみました。 5ボルト以上では、もうひトランク上のカウント設定でも良かったようです。 測定時間が長くなるとそれだけ精度がアップすると考えれますが、気持ちの問題かもしれません。
■ まとめ
モータ単体での速度特性が測定できるようになりました。 このデータと平坦路単機走行での速度特性を比較すれば、駆動伝達系の摩擦抵抗が推定できるようになるはずである。 また、組み付け不具合もチェックできるようになるかもしれないと期待している。
■ 追記 2016/6/19
このレポートをまとめた後に、キハ35-68 号車の動力特性を実際に測定してみた。 そして、モータの回転数特性を比較してみたら、なんと明らかに異なっていたのである。 それも丁度2倍なのだ! これには参った!
回転センサーは取り付けたままなので、センサーからの信号は二つの測定時とも全く同じであると考えると、新しく作成した測定ユニットが悪いのか、測定時の設定が悪いのか、あるいはデータ処理(Excel のデータ処理計算)が間違えているのかである。
1) 最初にExcel のデータ処理計算を疑った。 何度も計算式を見直したが間違いは無かった。
2) 測定時の設定が悪いのかと疑った。 カウントする規定回数をセットするジャンパーピンの位置を写真で拡大して確認するも、256の位置であり間違いない。
3) 今回使用したバイナリカウンタの仕様が異なっているのかと疑って、仕様書を何度もチェックしたが間違いない。
4) 最後に、新しく作った測定シールドでは、パルスを2重カウントとしているのでは? と疑って、簡易オシロで観察することにした。
● パルス波形の観察
新しいシールドとオシロシールドを接続し、センサーを付けたままのキハ35-68 号車を駆動させて、簡易オシロにて波形を観察した。

下に、センサ出力と、プリアンプ後のパルス波形のオシロ画面を示す。
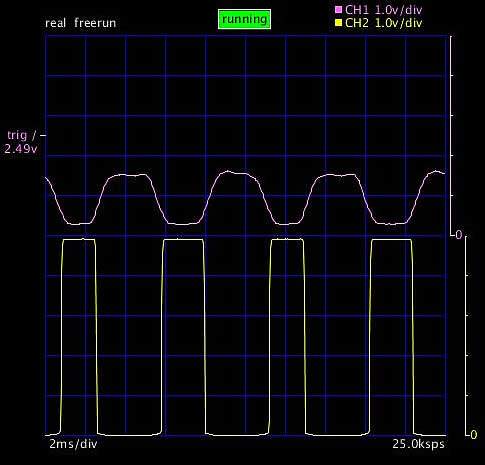
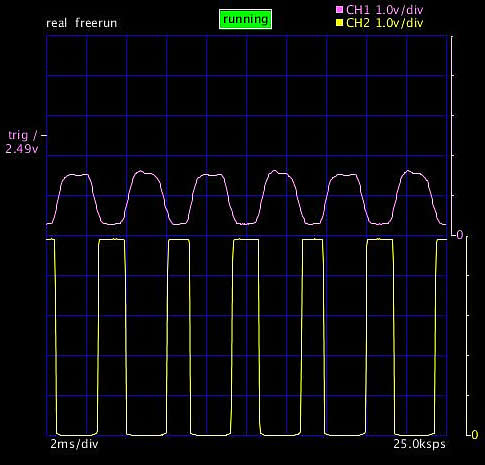
結果は見ての通り、波形に関しては何ら問題ない事が分かった。 疑っていたパルスの2重カウントは否定された。
◆ 結論は?
これはもう設定ミスとしか言いようが無い。 ジャンパーピンの位置が違っていたに違いないと判断するしかないのである。 とりあえずは 年のせいなり、と仮決定することにし、測定のN増しで確認することにしよう。
2016/6/16 作成 6/19 追記