
鉄道模型実験室 No.105 使いながらの小改善
■ はじめに
今回のプロジェクトにより完成して新しい測定システムを使って、未測定であるいろいろなモデルを順次測定している。 その中で、いくつかの改善を施しながら進めたのでここに記録して置く事にする。
■ 気になったノイズの件
先回の報告 「プリアンプ改良後の走行試験」で気になっていた 50KHz の振動のよなぎざぎざについて、もし、ノイズであればコンデンサで防止出来ると考えて、0.1μFのパスコンをセンサ出力部ととランジスと出力部に入れて、オシロで観察すると見事な三角波に変身していた。 利きすぎである。 素人感覚で適当な思いつきの失敗例である。
そこで、以前参考にさせてもらった CRローパス・フィルタの計算サイトにて、しっかりと計算してみた。 挿入場所をトランジスタのベース入力部とすると、抵抗値は3.3Kオームである。 そして、モータ回転を Max 30,000rpm と見積もると、500 Hz となる。 回転数測定のためのマーキングを1回転あたり4個のパルスまで対応できる様にするとするならば、10 kHz 以上の周波数をカットするローパス・フィルタにすれば安全とかんがえる。
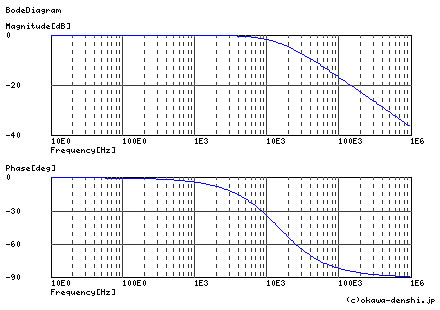
これに適したコンデンサ容量を手持ちの部品より選択して、0.0033μFと選定した。 カットオフ周波数は14.6 kHz である。 ボード線図を右に示す。 そして、EF15-79号機でのオシロ画面で波形を観察し、問題無い事を確認した。 でも、50KHz の振動のよなぎざぎざ対策になっているかどうかは確認出来なかった。
■ EF15-79号機の測定
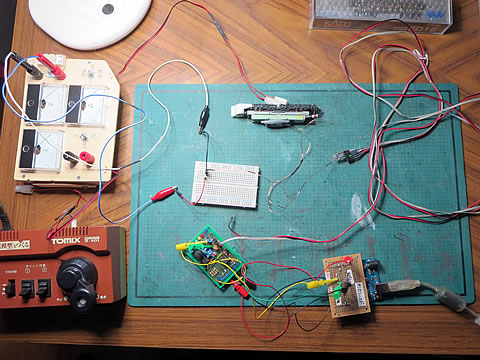
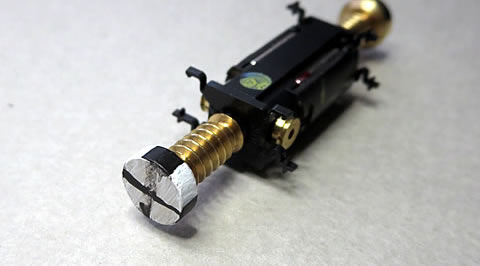
まず、EF15-79号機から測定を始めた。 5年も前に初期に測定したままであったからである。 測定台での計測の前に、シールドを測定台から取り外し、机上で波形を観察することにした。 その実験状態を下に示す。
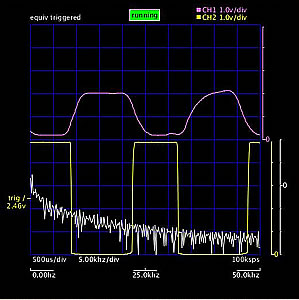
モータの回転は、モータ端子電圧測定用の配線を活用している。 こちらの配線具合と回転センサの設置具合を同時に確認出来るのである。 この時の簡易オシロの波形を下に示す。 モータ回転のマーキングは、2パルス/1回転であり、回転数はパルス波形から計算したものである。
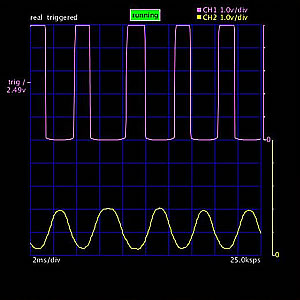
低速: ≒ 1,400 rpm |
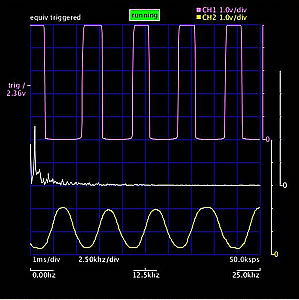
中速: ≒ 12,00 rpm |
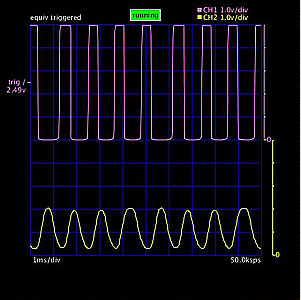
高速: ≒ 32,00 rpm |
 |
 |
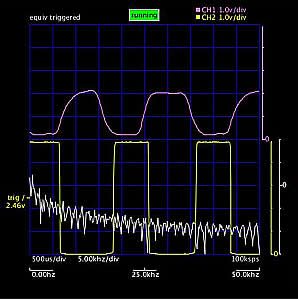 |
上のチャンネルには回転センサからの波形を、下のチャンネルにはトランジスタの出力波形を観察している。 回転センサからの波形はやはり歪んでいるが、トランジスタによって、 0.5 ボルトを超えるあたりでON/OFF されて、出力波形はくっきりとした矩形になっている。 モータの速度を変えても波形は崩れていないので、回転数測定は良好な状態と判断した。
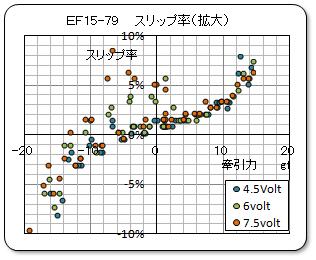
そして、速度特性や牽引力特性を測定したが、その結果はマイコレクションの「EF15-79号機」に示す。 多くの測定項目は良好であるものの、スリップ率に関するデータだけは、右に再掲載するが、不満の残る結果となった。 制動側のスリップ率のバラツキが大きいのである。 スリップ率はモータ回転数と測定ゲート通過時間から計算しているのが、やはりモータ回転数の計測にまだ問題が残っているのだろうか?
■ EF58-60号機
スリップ率、即ちモータ回転数の計測に疑問を残しながらも、次のモデルとして、EF58-60号機を選定して測定を実施した。 同様に机上でのオシロ観察を実施したが、問題無かったので報告を省略する。 また、特性の測定結果を「EF58 60 お召予備機」 示す。
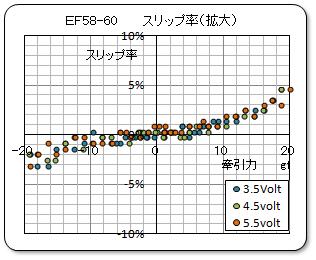
この時のスリップ率に関するデータを左に示すが、今回は全く異常が無く、安定したデータが得られている。 この違いはモデルでは無く、測定方法での不具合とみているが・・・・・・・・。
■ ED16-3号機 ・・・ 専用のオシロシールドを作る
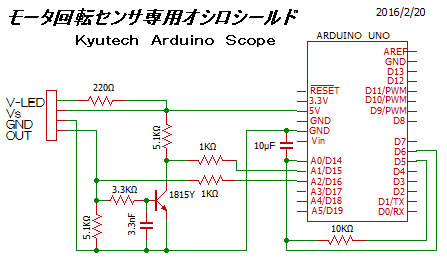
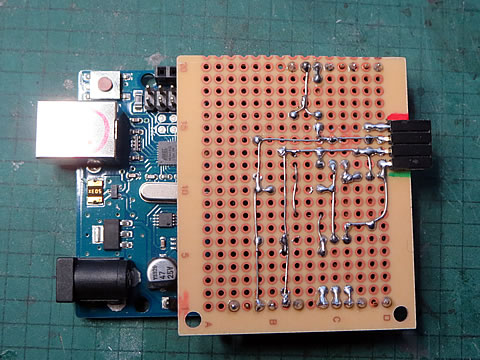
次に、 ED16-3号機を測定した。 測定のたびに、測定用のシールドを外すのは面倒だし、ブレッドボード上で回路を組むのも面倒なので、専用のオシロシールドを作ることにした。 その回路図を右に示す。 コネクタ部は、センサからの配線をそのまま差し込んで使用出来るようにしており、センサの電源もシールドから供給される。
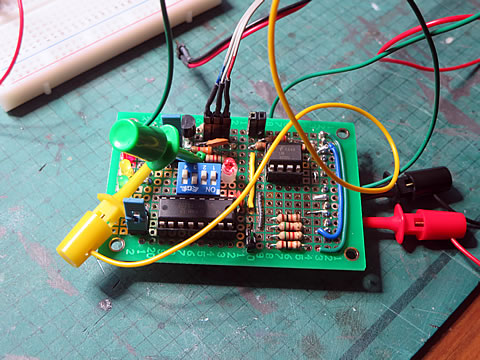
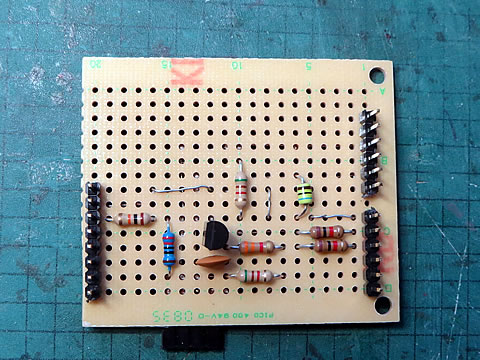
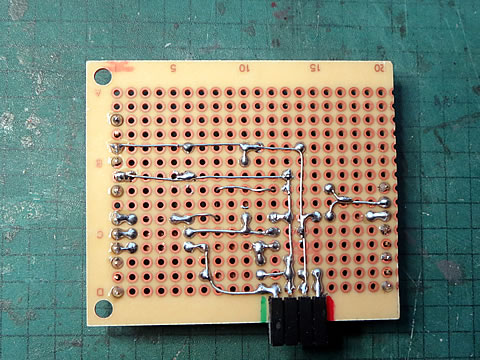
作成したシールドを下に示す。 片側が少し切り取られていた片面のユニバーサル基板が有ったので、これを使用した。 Arduino に接続するピンの関係で、部品は内側になる面に取り付けており、半田付けした面が表になってしまった。 また、クロス配線を嫌って、オシロ入力のチャンネルが今までとは逆になっている。
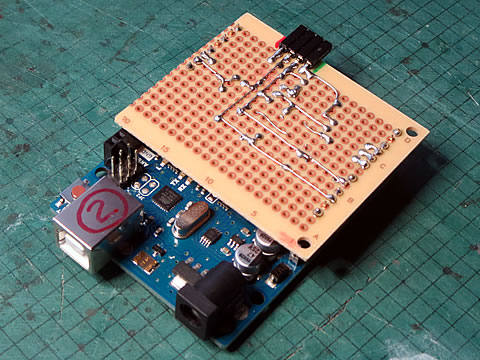
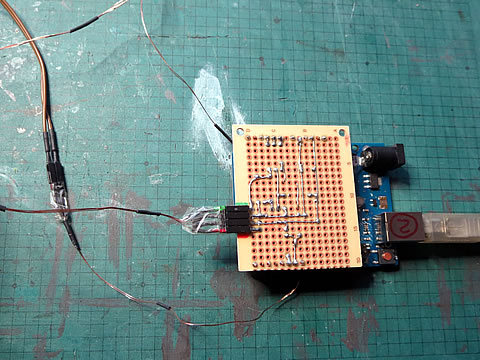
オシロ専用にしている Arduino に取り付けた状態を下に示す。
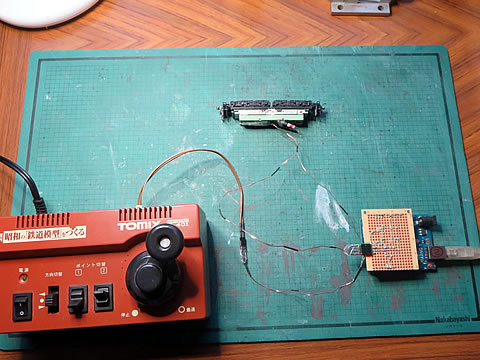
モータの電源は、端子電圧測定ラインを利用し、TOMIX のパワーユニットと接続できるように、これまた専用線を作った。 そして、机上でのオシロ波形を観察する道具類は下の写真のようにすっきりし、準備も簡単に出来るようになった。
動力部の細工も簡単になっている。 回転センサと電圧測定端子をセロテープで止めている。
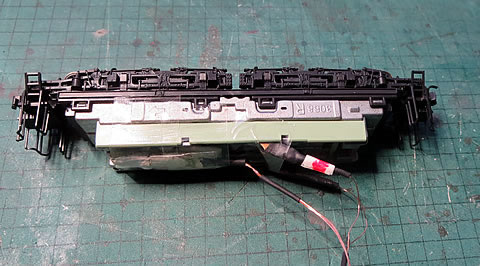
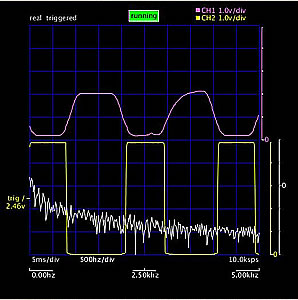
また、今回のED16-3号機では、1回転当たり4パルスを発信出来るように、十字方向に白黒のマーキングをペイントした。 さて、その机上での波形観察の結果を次に示す。
低速: ≒ 3,500 rpm |
中速: ≒ 7,000 rpm |
高速: ≒ 12,000 rpm |
 |
 |
 |
センサからの波形はサイン波状であるが、 プリアンプからの出力はくっきりとした矩形となっている。 チャンネルの入力が今までとは逆になっているのは、シールド作成時のクロス配線を嫌ったからである。 また、入力波形を見ると、パルス毎の波形の形が少しずつ異なっているが、これはマーキングの精度によるものである。 でも、綺麗に矩形はに整形されているので、パルスカウントには全く影響が無いとものと判断している。
そして、4パルス・マーキングに対しえも、確実に対応できている事が分かった。
この車両の動力特性の測定結果をマイコレクションの 「ED16-3号機」 に示す。 速度特性の測定時では異常なかったのに、牽引力特性を測定時に、スリップ率のデータが下左に示す様に、ドリフトしているので分かる。
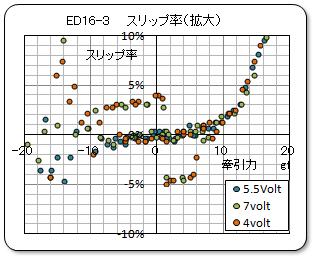
最初に測定した5.5Volt 時は正常状態であったが、後半の 7Volt 時や 4Volt 時に異常が発生している。
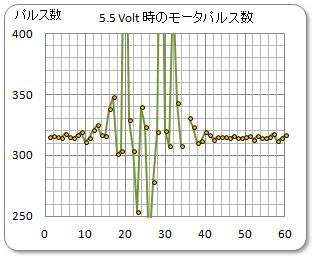
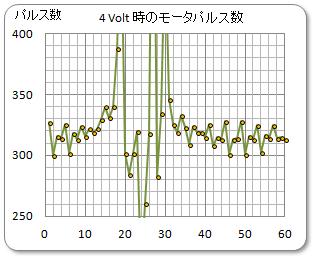
モータのパルス測定に原因が有るのではと考えて、測定されたパルス数を時間経過でグラフにしたものを上中と上右に示す。
中間部は、牽引力が大きな領域であるので、プラスのスリップとマイナスのスリップを示すのは正常である。 しかし、最初と最後の部分は牽引力が小さい領域で測定しており、登り坂でも下り坂でもスリップ率はほとんど同じに成る筈である。 確かに 5.5Volt 時にはそのようであったが、 4Volt 時には4回毎に変化している。 これは異常であることは確かである。
| パルス数 | 走行状態 | ゲート | 測定ゲートの光の方向 |
|---|---|---|---|
| パルス数が多い | 左旋回の下り坂 | ゲート1 | 車両の右側から光 |
| パルス数が少ない | 左旋回の登り坂 | ゲート2 | 同上 |
| 同じくらい | 右旋回の登り坂 | ゲート1 | 車両の左側から光 |
| 同じくらい | 右旋回の下り坂 | ゲート2 | 同上 |
そこで、この4回毎の変化に注目して、通過する測定ゲートを調べ、右の表のようにまとめてみた。 これより、ゲートの違では無く、光の当たる方向によってパルスが多くなったり、少なくなっているようである。
これは、光を遮る遮蔽板の取り付けが不安定ではないかと言う事を暗示していると判断した。
取り付け状態は、上記の車両データのページに掲載しているが、デッキ部分に張り付けた紙テープが剥がれて来た状態ではと推察する。 測定中に気が付いて確認しておけばと反省している。
■ 遮蔽板の改善
さっそくこの遮蔽板の取り付け方法を改善することにした。 車両前面にT型のプラスチック片を両面テープで確実に取り付けるようにした。 そして、光がどちら側から当たっても同じになるように、中央部に設置するように気を配った。

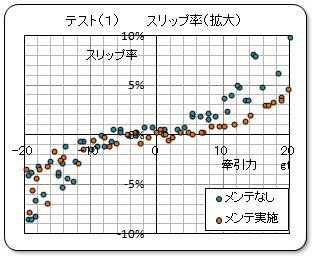
その結果として、スリップ率のグラフを右上に示す。 データが安定しているので、改善出来たと判断することにしよう。
なお、このテストは何をしているかは、次回に報告しましょう。