
HOME >> 鉄道模型実験室 > プリアンプ改良後の走行試験
鉄道模型実験室 No.104 プリアンプ改良後の走行試験
■ はじめに
回転数検出部のプリアンプ回路を修正したので、確認のために、動力車の性能測定を実施した。 その結果、正常に作動している事が確認出来た。
■ EF15-79号機での性能測定
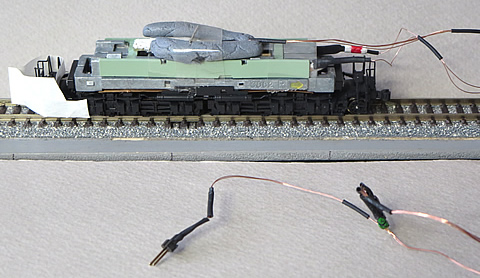
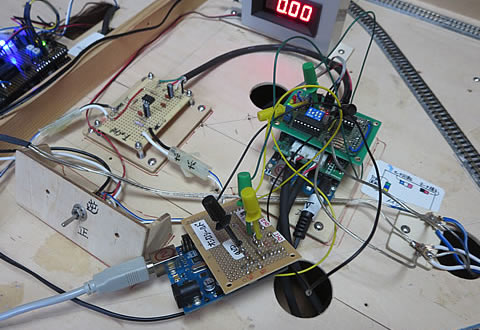
サブシールドについて、先回検討した回路のように修正を施した。 下左の写真。 そして、測定対象の車両として、KATO のEF15-79号機を選定た。 なお、この車両の構造や仕様については、マイコレクションの「EF15-79号機」に記載している。
● 速度特性の測定
定形スタイルに従って、測定結果を下に示す。
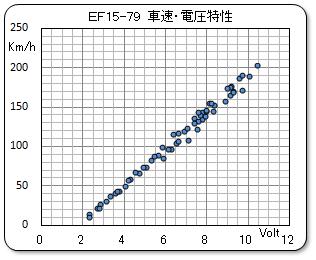
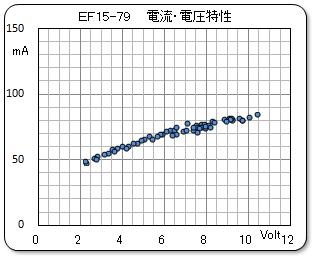
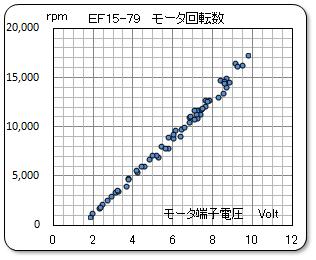
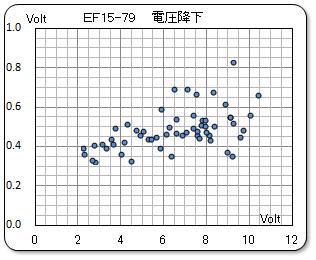
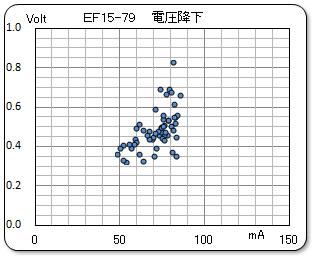
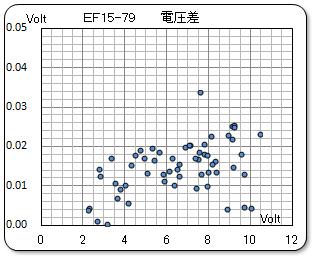
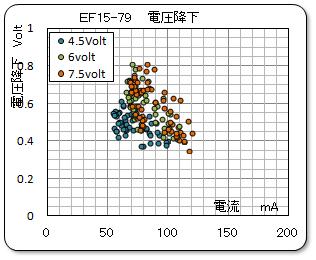
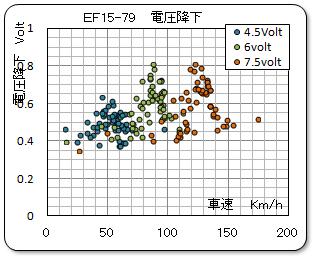
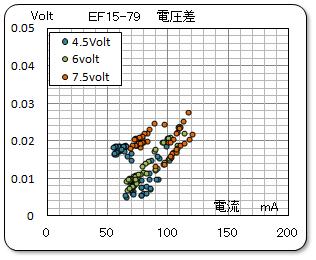
車両の性能上の特徴については、マイコレクションでの記載に譲って、ここでは測定方法から見た考察を述べることにする。 車速、電流、モータ回転数などのデータは、従来からの状態と同等であり、問題ないであろう。 電圧降下についてはデータの散布状態は相変わらずなので、測定方法ではなくてモデルの特性と考えるべきか。 測定点の違いを見た、電圧差のグラフより、配線による電圧降下量は、車両上での電圧降下量よりもひと桁小さいので、今後は考慮する必要は無いであろう。
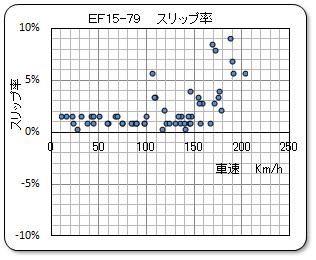
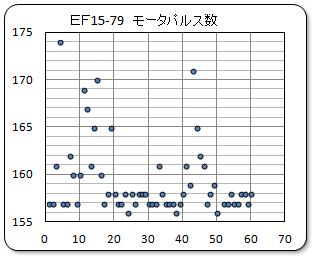
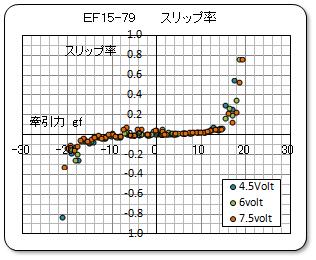
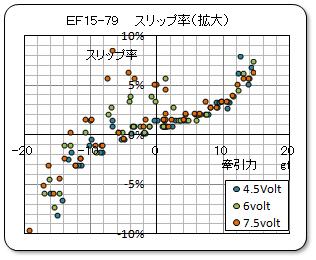
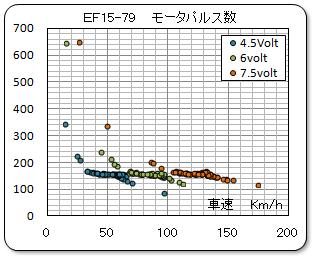
スリップ率については、速度が高くなるとスリップが大きくなる傾向がある。 モータパルス数の計測値を示すグラフからも分かるように、160個程度のパルスを計測しているので、最初や最後のカウントタイミングによっては、数個のカウント誤差は発生するのはやむを得ないと考えている。 このため測定誤差として数%は許容しているが、それ以上の数値は、実際の値かも知れないし、計測上のエラーかもしれない。 まだ、どちらとも断定はしていない。
● 牽引力特性の測定
同様に牽引力特性も見てみよう。
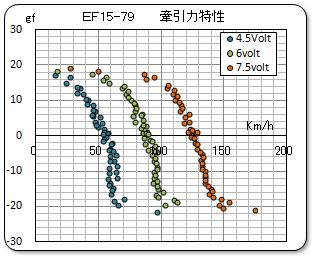
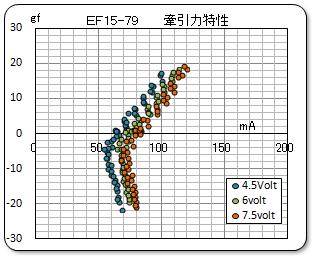
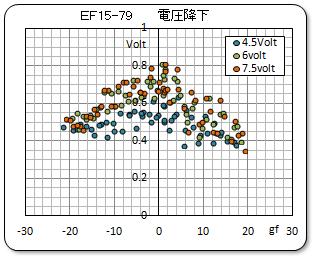
車速、電流、牽引力などのデータは、従来からの状態と同等であり、問題ないであろう。 電圧降下については傘型の特性を示しており、牽引力が大きくなると電圧降下量が低下するのはやはり本当のようである。
 .
.
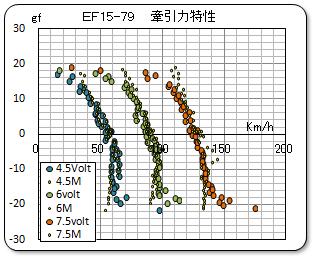
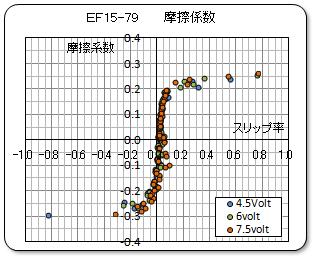
注目しているスリップ率については、我が測定法ではこれが限界の様である。 駆動力ゼロの時にスリップ率はゼロ点を通るはずであるが、これは、動輪の直径の測定値の誤差と考えている。 どの部分の直径なのか、トラクションタイヤの直径は? など、0.05mm以上の精度が求められるである。 動輪径が 8.4mm なので、その1%と言うと0.08mm の誤差で測定することが求められるのである。 逆に、このデータから直径を推定すると、ノギスよりも精度が高い事になるのである!
また、参考にモータパルスのグラフを記載しているが、この牽引力特性の測定では、車輪がスリップする状態でも測定しているので、この様なパターンとなっている。 駆動側でスリップするとパルス数は多くなり、制動側でスリップするとパルス数が少なくなるのである。
■パルス波形の確認
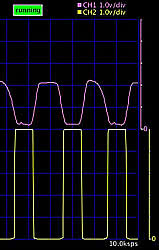
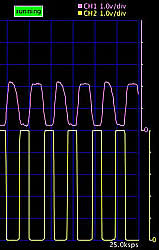
実際の測定状態でのパルス波形を観察した。 その時の状態を右に示す。 オシロシールドを持ち出し、センサからの入力部を上のチャンネルに、プリアンプからの出力部を下のチャネルにを取りこみ、簡易オシロで記録した。
低速から高速まで変えているが、正常に作動している事が確認された。
 |
 |
 |
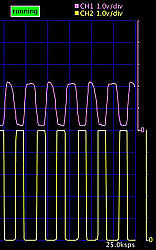 |
供給電圧 = 3.5 volt |
供給電圧 = 6.5 volt |
供給電圧 = 9.5 volt |
供給電圧 = 10.5 volt |
 .
.
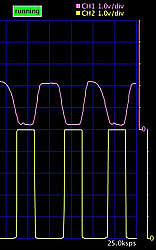
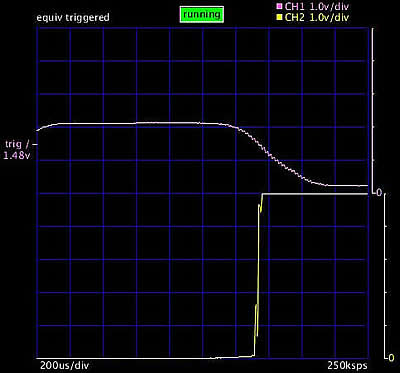
いろいろな条件で観察していたが、気になる現象を見つけた。
その時のオシロ画面を左に示す。 パルスの立ち上がり部分にジグザグ部が現れている。 そして入力部の波形にもぎざぎざが見えるのである。 発生状態は定常的で無いので、その瞬間をスクリーンコピーするのは難しかった。 ぎざぎざの間隔から推定すると、50KHz の振動のようである。
しかし、実際の回路上で発生している振動現象なのか、簡易オシロのマジック (測定および表示上の制約 ) なのかは判断が付かない。 簡易オシロ説明書によると、実時間サンプリングが毎秒50キロサンプルと説明されているので、この影響が出ていると考えることも出来る。
■ まとめ
やっとのことで、今回のプロジェクトを完成させる事が出来たと確信する。 今後は、このシステムを使用してまだ未測定のモデルの特性を調べて行くことにしよう。