
HOME >> 鉄道模型実験室 > モータドライバのPWM波形を観察する (その3)
鉄道模型実験室 No.155 モータドライバのPWM波形を観察する (その3)
東芝製モータドライバTB6643KQのPWM波形を観察した結果、自分にはこのモータドライバの挙動は理解出ず、使えないと判断することにしました。 そして他のモータドライバを使うために、そのPWM波形を観察することにしました。 ROHM社のHブリッジドライバーシリーズのBD6211と、東芝製のTB6612です。 結果は上々でしたので、BD6211を使ってドライバセットを作ることにしよう。
 .
.
■ ブリッジドライバ BD6211FのPWM波形の観察
このドライバは、「Arduino Nano Every のPWM周波数をアップする」(2020/3/3)にて説明した給電制御での周波数アップの方法のひとつとして考えていたもので、、その部品を秋月から入手していたものである。
入手した石はBD6211の7V耐圧使用でしたが、簡単な実験(後日報告しよう)で確認したところ、立派にコントローラとして応用できそうであることが分かりました。 VREF制御モードでは、入力されたDC電圧と供給電圧の比に応じたヂューティ比てPWM制御を実施してくれるもので、PWM周波数は25KHzでするので、目的にはピッタリです。 ただ、入力はDCである必要がありますので、Arduino のPWM出力は平滑回路を通す必要があります。 抵抗とコンデンサを使えば出来そうですね。
その後、Arduino Nano Every でのPWM周波数のアップ方法を見つけたので、VREF制御モードでなく、通常の使用方法でも使ってみることにしたのです。
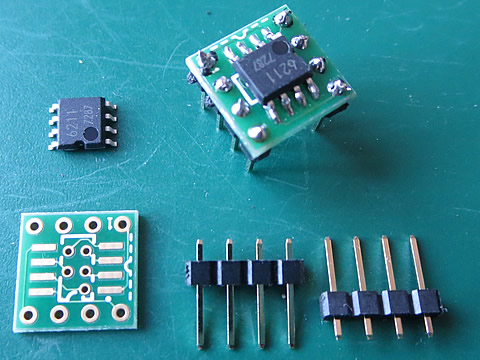
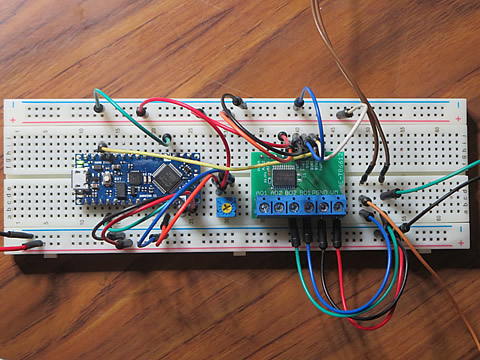
ただしこの部品は、1.27mmピットの表面実装パッケージのICであるため、DIPに変換する基板が必要でしたので、右の写真のように、これらの部品も一緒に購入し、写真の右上に示す状態にハンダ付けしました。
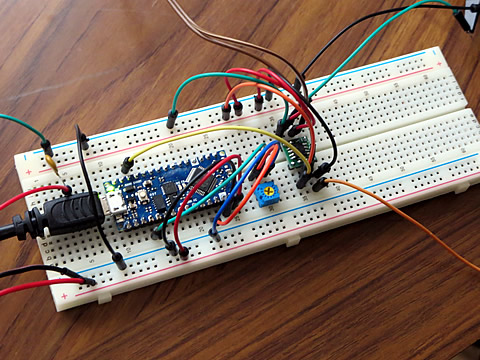
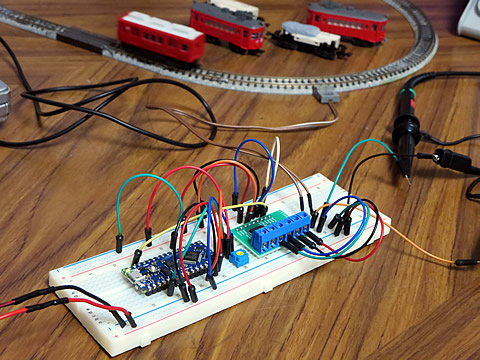
観察実験の様子を下に示します。
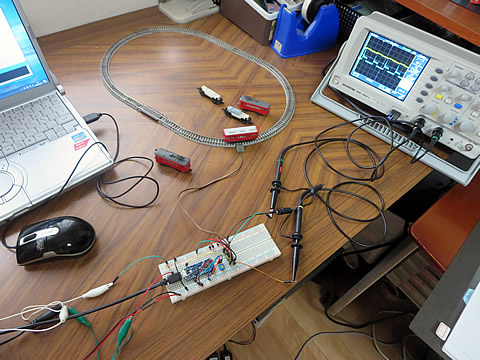
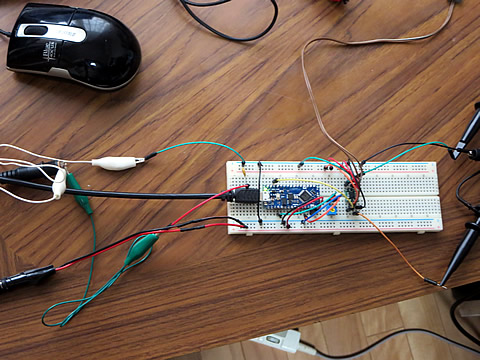
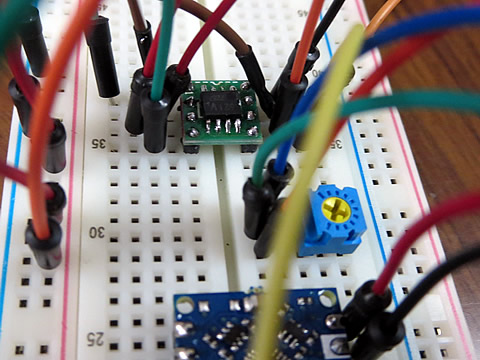
このICの供給電圧は、耐圧仕様が7V仕様であったため、DC5volt 電源が必要でした。 Arduino からも +5volt は取れるのですが、可変抵抗入力のための信号系の電源だけにして、モーター駆動用の電源は別のACアダプターから供給するようにしました。
Arduino用のスケッチは先回と同じものを使用しています。 ただ、電源電圧が5volt であるためボリュームいっぱいにすると、デューティ比が100%になるように書き換えました。
● オシロでの観察結果
オシロのCH1は線路の+側に、CH2 は-側に接続し、GND線は給電のGNDに接続しています。 まず、Bトレ動力車から走らせていました。
| Bトレ 走行中 | Bトレ フル走行中 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 = 15.7 KHz |
なんと見事な矩形波ではありませんか! この分ではさらに周波数を上げても問題ないようです。
また、この波形を見ていると、このブリッジ回路はブリッジの下流側のトランジスタでON/OFF制御している事が解ります。 上流側のトランジスタはモータの回転方向を決め、下流側のトランジスタでPWM制御をするというブリッジ回路の基本的な制御を実施していますね。
また、デューティ比を100%にしても、電源電圧が5volt であるため、程よい速度で電車を走らせることが出来ます。
| コアレス車 微速度 | コアレス車 中速度 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
今度はコアレス車を走らせました。 Bトレ車と波形が空に異なってきていますが・・・・・・・・・、速度に関係していますので逆起電圧が影響してい様ですが・・・・? 自分には、まだ充分に理解できません。
つぎに、PWM信号を入力しない他方のIN端子を+5voltにしてみました。 これはこのICのデータシートで説明されていたPWM制御モードBに相当る制御方法です。
| Bトレ車 走行中 | コアレスモータ車 走行中 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
なんと、電車は逆方向に走り出しました! ムムム・・・・・・・・・・? データシートを読み直すと確かにこのような波形となりますと説明されていました。 だんだん頭が混乱してきました。 (;_;)!
この機能を利用すると、PWM信号を入力しない他方のIN端子をON/OFF制御すれば、電車の進行方向を制御できることではないだろうか。 でも、ギャップを跨ぐ時の受け渡し制御状態を充分に検討しておかないと、電車の車体を通してショートする恐れもありそうです。 要注意点ですね。
 .
.
● まとめ
このICでは、Bトレなどを走行させる鉄道模型の給電装置用として、高い周波数のPWM制御に対応できることが解りました。 しかし、制御に」あたっては、どのモードを使用するのか、冷静でかる充分な検討が必要です。
このシリーズのICは、絶対最大定格電圧が、7V、18V、36Vで、最大出力電流が0.5A、1.0A、2.0Aで、チャネル数が1chと2chのシリーズがラインアップされています。 このうち、秋月では、7V/1.0A/1chのBD6211と、36V/1.0A/1chのBD6231と、18V/2.0A/1chのBD6222が入手可能でした。
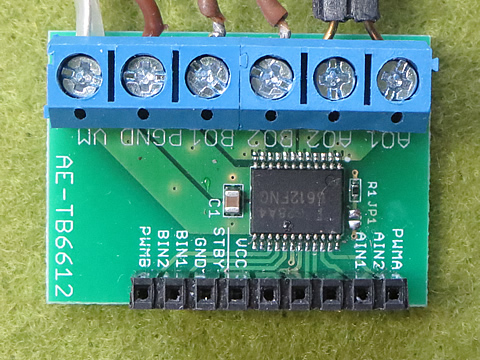
■ ブリッジドライバ TB6612のPWM波形の観察
このドライバは、卓上レイアウトの制御用として使用していた物で、自分のミスによって焼いてしまったICです。 今回は予備のICを使って実験しましたが、Aチャネルは壊れていた物の、Bチャネルが生きていましたのでこの部分を使って上記と同じ実験を実施しました。
右の写真は、秋月にて入手したキット品で、壊してしまった1号機の写真です。 2号機は、下の写真に示すように、入力側は、ピンヘッダをハンダ付けしています。 また右上の写真に移っているチップコンデンサは引っ剥がしたままで、実験しています。
| Bトレ車 走行中 | コアレスモータ車 走行中 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
| 電車なし | INPUTを逆にする |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
これも見事な矩形波ではありませんか! この分ではさらに周波数を上げても問題ないようです。 さらに、Bトレだろうが、コアレスだろうが、電車が乗っていなくてもその波形の乱れはほとんどありません。 また、INPUT信号を逆にすると、BD6211とは別の動きをします。 これは、ダイレクトPWM信号入力方式を使っているからだろうか。
データシートのPWM動作の解説図は、どうみても、TB6643KQと同じです。 しかし、オシロで見た波形は全く異なっているので、ドライバーの内部制御方法が異なっているとしか思えません。
● まとめ
壊してしまいましたが、このICも我が卓上レイアウトの給電制御には充分使用出来る事が分かりました。 また、スイッチサイエンスでは、すでに基板にハンダ付けした状態で販売されていますので使い易そうです。
■ 結論
卓上レイアウトの給電制御には、東芝製モータドライバ TB6643KQ はマッチしませんでしたが、BD6211FやTB6612Fは充分に使用できることが分かりました。 ただ、それぞれのICを使用する場合には、石によって使用方法が異なっていますので、充分注意して活用する必要がある事を改めて認識した次第です。
2020/3/6 作成