
HOME >> 鉄道模型実験室 > SLのモータ回転数を測定しよう その1
鉄道模型実験室 SLのモータ回転数を測定しよう その1
■ いきさつ
先回、SLの動輪の動きを捕えようとして小型の反射型フォトセンサを使用したが、そのプロジェクトは見事に失敗に終わった。 しかし、この小型の反射型フォトセンサはモータの回転数検知センサーとしても使用出来るので、設置場所の制約のある蒸気機関車のモータ回転数検知用に使ってみる事にした。 電気機関車での実績から考えて検知対象をモータ回転数数とするならば、多少のノイズパルスが紛れ込んでも、誤差範囲と考えれば充分に使用できると判断したのである。
しかし、実験を進めていて思わぬ落とし穴にはまってしまったのである。 反射型フォトセンサは電気機関車の測定で慣れていると安易に考えて、気を緩めて作業していた結果、単純なポカミスを犯してしまった。 その結果は、今回も右往左往の実験作業となってしまったが、そのおかげで、リモコン受光モジュールのカタログに記入されていない大切な機能を知ることが出来たのである。 まだその確認実験は未実施であるが、今回の顛末を数回に分けて報告しよう。
 .
.
■ 小型の反射型フォトセンサの使い方のミス
「SLの動輪の動きを捕えよう」で使用した小型の反射型フォトセンサは、GENIXTEK CORP.製のTOR-105F である。 その報告の中の “失敗 その2” で述べたような失敗をしたが、 さらに、ここにも失敗が潜んでいた。
今回は、SLの制約されたスペースにセンサを設置しなければならないのでチップ抵抗を使用してコンパクトなセンサユニットに仕上げることにした。 また、信号増幅のためのトランジスタのチップも検討したが、素人にはその選定が良くわからなかった。
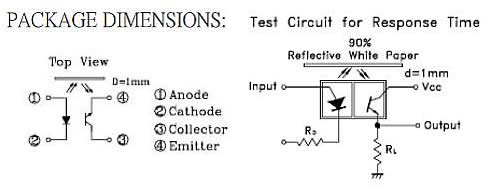
そこで本当にトランジスタが必要なのか疑問になり、もう一度説明書を読み直してみた時、“アレ?”と思った。 その説明書(ファイル名:TPR-105F.pdf )の一部を切り取って右に示す。 左側の図は寸法図の中に示された回路機能図で、右側の図は実験回路図である。 当初、右側の図を信用して、最初に使用したオムロン製のEE-SY110 と同様な回路構成でセンサユニットを作った結果、出力不足となりトランジスタを使って信号を増幅するはめになった。 今回、もう一度説明書を見ていて、寸法図の中の機能回路を眺めていた時に、小さな矢印に気が付いた。 そしてコレクタとエミッタの位置が違っている事に気が付いたのである。 なんと、二つの図の書き方が違っているのである。
そして、自分が作ったセンサユニットの回路は逆接続していたのである!
出力側のコレクタとエミッタを逆接続しても信号が出ていたとは驚きであるが、説明書として同じ書類の中で異なる表示をしているとは・・・・・・・・・・・! ケシカランと怒っていても、記述には何ら間違いは無いので電子部品のプロならば当然気が付くべき事ですと一蹴されてしまいますね。 ムム・・・・素人故の早とちりか・・・・・・・。
*********************************
そこで、今回は、正式な回路構成にして、ブレッドボードで実験してみた。 ダイオード側には51Ωの抵抗を挿入し、出力側には3.3Kと10KΩの抵抗を使いプルアップとプルダウンの回路を構成させた。 そして反射板をセンサに当てがって反応をチェックした結果、3.3KΩの抵抗の場合はLowレベルの電圧が低くならないが、10KΩの抵抗の場合は充分に機能することが確認された。 プルアップとプルダウンのどちらでもOKであったが、次段の回路の駆動パワーを考えてプルダウン回路にすることにした。
実験結果: Vcc = 2.4voltにおいて、Is = 24mA、 反射板なし Vo = 0.09volt、 反射板あり Vo = 2.28volt
反射板の位置でVo の値は異なるが、数ミリ程度では充分に反応していた。
■ センサユニットの作成
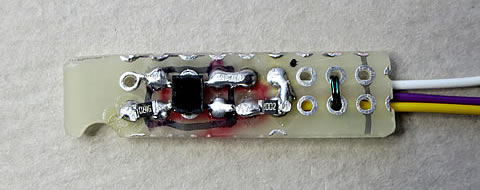
チップ抵抗を入手後、センサユニットの作成作業に着手した。 0.8mm の薄手のユニバーサル基板を切り出し、 反射型フォトセンサTOR-105Fと、51Ωと10KΩのチップ抵抗を下の写真に示すように配置した。



 .
.
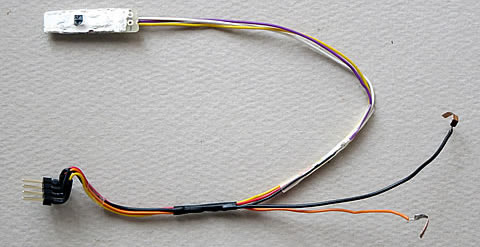
そしてモータ端子電圧を測定するための端子と、測定車に搭載されている測定ユニットと接続するためのピンヘッダを取り付けて、センサユニットを完成させた。 そして、回路の絶縁と保護のために、タミヤパテ(ホワイト)を塗って仕上げた。 右にその写真を示す。
■ センサの取り付け
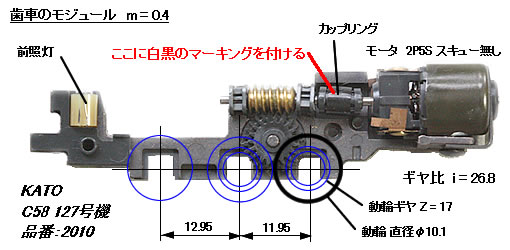
このセンサを車両に取り付けることにした。 今回選定した車両はKATOのC58-127号機である。
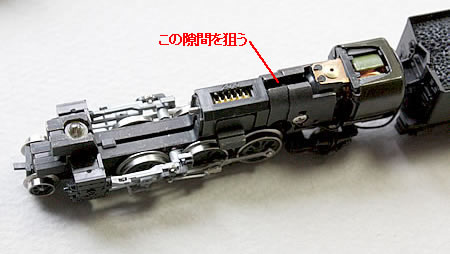
まず、取り付けスペースを探した。 当然ながらボディを取り外さなくてはならないがモータの回転を検知する場所は限られていた。 下の写真に示すように、ウォームとモータを連結しているカップリングに白色のマーキングを付け、左右のフレームの隙間から、その白マークの変化を赤外線の反射で検知するのである。 センサと少し距離があるが行けそうな気がしたので採用する事にした。
モータを外してカップリングを取り出し、その外周に反射面としてアクリルの白色の絵具を塗った。 一回転で2回変化するように2ヶ所に塗布した。
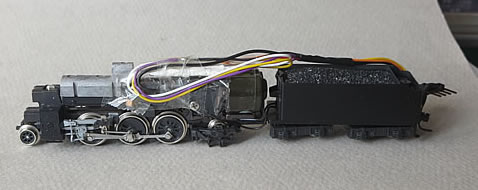
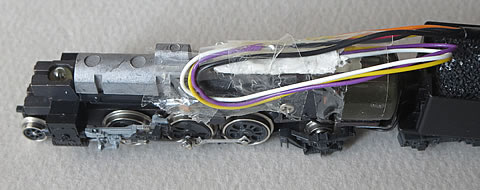
そして、センサユニットをセロテープで固定し、モータ端子電圧を検知する端子も左右のフレームの隙間に差し込んで配線類をセロテープで固定した。
 .
.
■ 作動チェック
このセンサユニットが正常に作動するかチェックする事にした。
まず、このC58-127号機のモータを回転させなくてはならないが、モータ端子電圧検知回路を使って電力を供給すると線路上を走らせなくてもよいので、ベンチ状態で確認出来る。
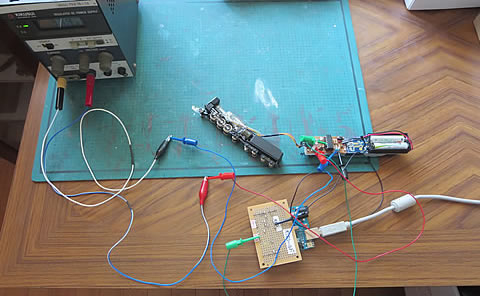
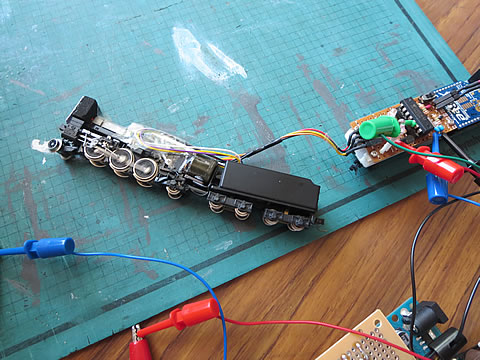
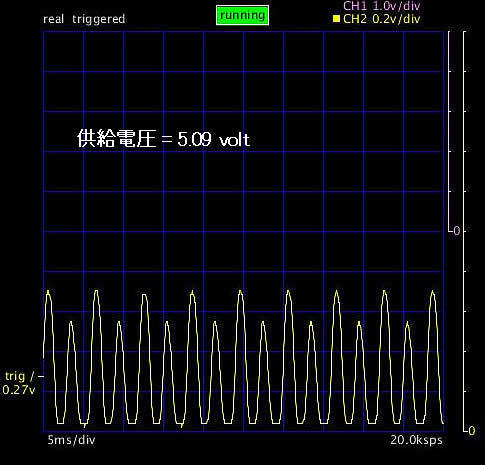
そして作動状態のチェックはオシロで確認することとして、右の写真の様な構成で実験することにした。
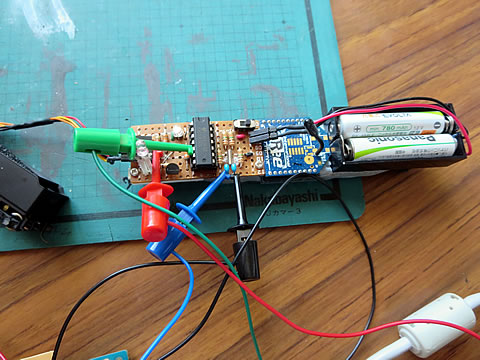
安定化電源からのプラスとマイナス線を、測定車ユニットのモータ端子電圧検知回路とGND線に接続して、モータの回転をコントロールさせる。 そして、回転数センサユニットからの出力回路をオシロのCH2 に接続した。 各部の接続状態を拡大したものを下の写真に示す。 センサ出力を取り出す場所が無かったのでICの足の部分を使っているが、信号のチェックポイントを設けいる必要がありあそうである。
 .
.
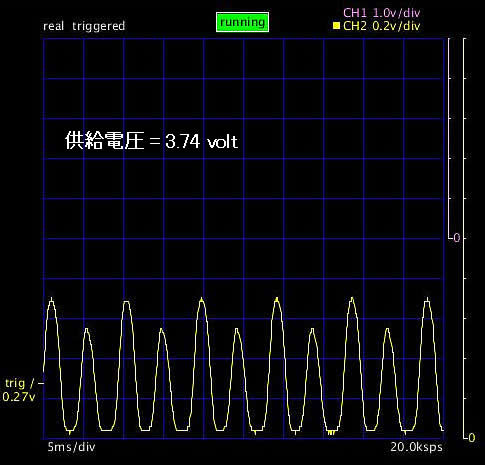
この波形の観察により、センサからは信号が確実に出ていることが確認できる。 また、第1の山と第2の山の高さが異なっているが、白色に塗ったマーキングの幅の違いと思われる。 その電圧のピーク値は、1/3分圧回路を勘案して
第1の山は 3.5div × 0.2v × 3 = 2.10 volt
第2の山は 2.8div × 0.2v × 3 = 1.68 volt
と読み取れる。
また、時間軸からモータの回転数を計算すると、
1) 3.74ボルト:10.5回/50ms÷2 = 6,300 rpm
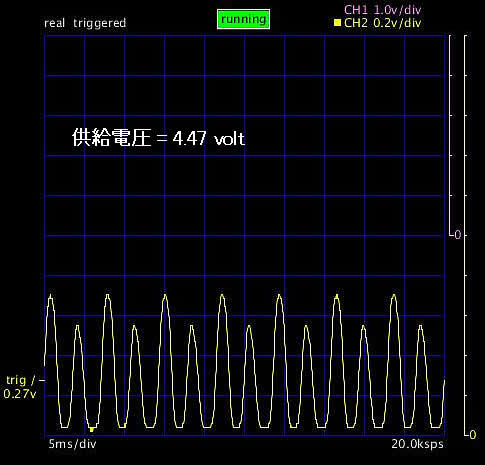
2) 4.47ボルト:14回/50ms ÷2 = 8,400 rpm
3) 5.09ボルト:17回/50ms ÷2 = 10,200 rpm
となり、妥当な値と判断出来る。
第2の山の電圧が低そうなので、正しく赤外線通信の乗せることが出来るか不安があったが、この状態で測定台を使用しての総合テストに移行してしまった。
******************************
本来ならここで、赤外線の発信パルスを確認しておくべきであったが、気楽な気持ちで先を急いでしまったのである。 そして、重大な単純ミスを犯してしまったのであるが、その内容はその2で報告しよう。