
鉄道模型実験室 試験走行のための準備
■ はじめに
今回の工作によって修正工作した部分や新しく工作した部分があるので、これらの機能テストと測定数値の校正を実施する。
#define SLIT4_PIN 13
#define SLIT3_PIN 12
#define SLIT2_PIN 11
#define SLIT1_PIN 10
#define angle_pin 0
#define mvol_pin 3
void setup()
{
pinMode(SLIT1_PIN,INPUT);
pinMode(SLIT2_PIN,INPUT);
pinMode(SLIT3_PIN,INPUT);
pinMode(SLIT4_PIN,INPUT);
Serial.begin(9600);
}
void loop()
{
int slit1;
int slit2;
int slit3;
int slit4;
int angle;
int mvol;
slit1 = digitalRead(SLIT1_PIN) ;
slit2 = digitalRead(SLIT2_PIN) ;
slit3 = digitalRead(SLIT3_PIN) ;
slit4 = digitalRead(SLIT4_PIN) ;
if (slit1 ==LOW){
Serial.println("slit 1 ,E");
} else if (slit2 ==LOW){
Serial.println("slit 2 ,E");
} else if (slit3 ==LOW){
mvol = analogRead(mvol_pin);
String buf = String(mvol) + "slit 3 ,E";
Serial.println(buf);
} else if (slit4 ==LOW){
angle = analogRead(angle_pin);
String buf = String(angle) + "slit 4 ,E";
Serial.println(buf);
}
delay(1000);
}
■ ゲートのスリット番号の確認
走行車両の通過をセンシングするスリットについて、ゲートの取り付けを左右変更したり、上下を逆さ間にしたりの修正工作をした。 このため、新しくスリット番号を記述するとともに、位置と動作の確認を実施した。 その時のArduino のプルグラム、即ちスケッチを右に示す。 そして、 スリット番号の確認と共に、傾斜台の角度校正やモータ端子電圧の校正も実施できるように細工した。
測定処理用のメインのArduino に右のスケッチを読み込ませ、シリアルモニタを起動させておく。 そして、各スリットを手でかざして、スリットの動作確認にと表示されるスリット番号を確認していった。 その結果、スリット2が応答せずLEDの断線を確認した。 また、スリット1の場所の応答が、スリット2の表示を示していたので、10と11のピン番号の定義が逆であったことも判明した。
これらの修正を実施した後、再テストを実施して正常に機能している事を確認した。
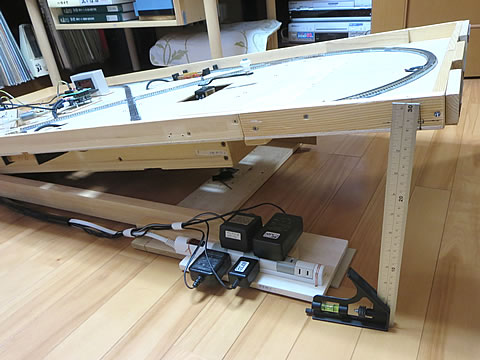
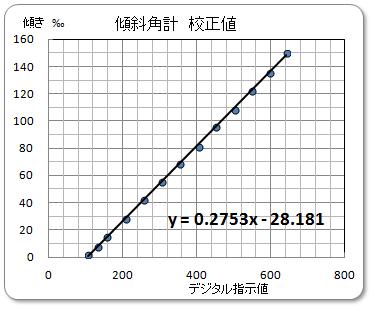
■ 傾斜角測定の再校正の実施
傾斜角計は、ゲートの位置変更によって干渉することになったので、位置を10cm 近く移動しているので、再校正を実施した。 傾斜台の側面の左右に十字線を罫書き、スケールで床からの高さを測定すると同時に、シリアルモニタに表示された “angle” 値を読み取っていく。
これらのデータをEXCELに転記して、傾斜勾配と angle の数値をグラフ化して直線近似させて、その数式を求めた。
そのグラフを下左に示す。
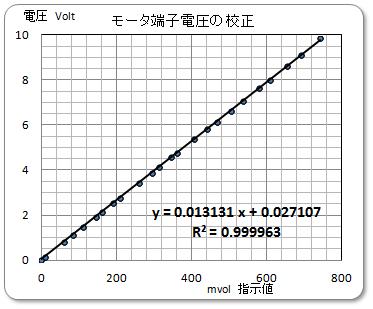
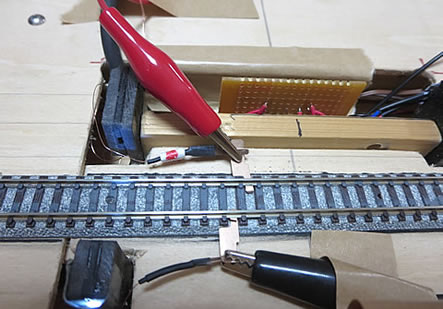
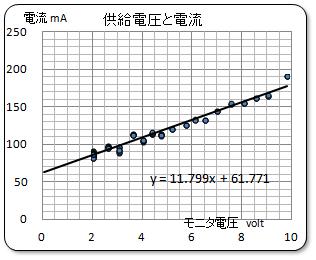
■ モータ端子電圧を測定する回路の校正
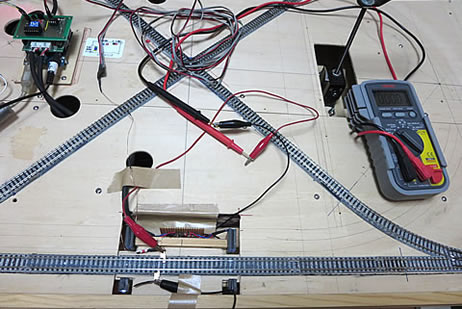
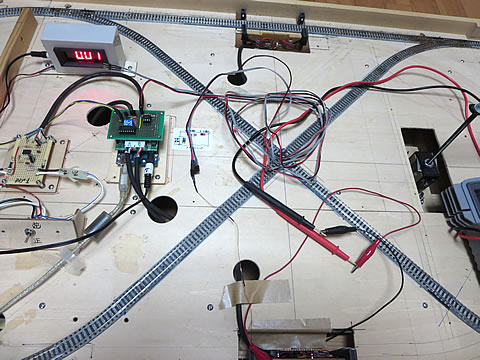
次に、新しく回路を組んだモータ端子電圧の測定回路の校正を実施する。 下左の写真に示す様に、電圧測定用端子をゲート部分の線路に差し込んだリン青銅片とクリップで挟み、レールと接続する。 電圧測定線は、工作した信号線を介してArduino に接続する。 一方、クリップ線の他端はテスターに接続し、電圧値を読み取っていく。 下右の写真。 電源電圧からレールに電力を供給している状態で電圧をセットし、ゲートのスリットを手で塞いでArduino にアナログデータ(mvolの値)を読み込ませる。 この時のデータとテスターの示す電圧値を読み取って、EXCELでグラフ化したのが右上のグラフである。 このプロット点を直線近似させた時の数式が電圧の換算式となる。
■ 電源供給ラインの電圧降下について
上記の実験に合わせて、ゲート部でのレール電圧と実際に電圧を測定する電圧測定部との電圧降下量をチェックすることにした。 下左の写真に示す様に、電源からレールに電力を供給するラインが複雑化するとともに、長くなってしまった。
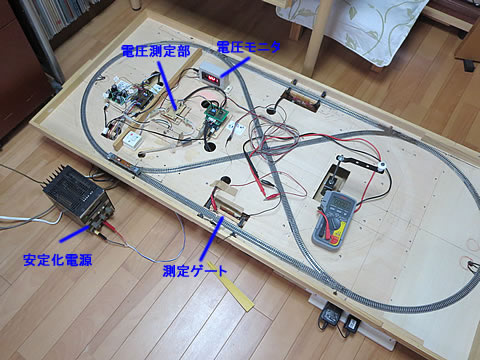
モータ端子電圧の測定は、動力車が測定ゲートを通過中に測定しようとしているが、この時の動力車の電圧降下量を計算するためには、その時のレール面の電圧を正確に計っておく必要がある。 しかし、現在の状態は、写真に示す電圧測定部で測定した値をレール面の電圧として計算しているので、測定点の違いによる誤差の影響は免れない。
特に今度の構成では、線路の途中にTOMIXのポイントが含まれているため、大いに心配している。 また、動力車の消費電流が大きい場合には、電圧降下量は大きくなるはずである。 なお、電流値は途中での漏電が無い限り回路のどこで計っても誤差がは少ないはずであるので、配線途中の抵抗によって電圧降下発生する電圧については、注意意を払っておこう。
そこで、動力車を走らせながら電圧測定部と測定ゲート部での電圧値の違いを測定することにした。 スケッチには、電圧と電流も読み込んでシリアルモニタに表示するように修正したが、簡便な方法として、電圧測定部の近くに接続している電圧モニタと、安定化電源で表示している電流値、およびレール面での電圧値をテスタで読み取る方法で実施し、そのデータを下に示すグラフにまとめた。
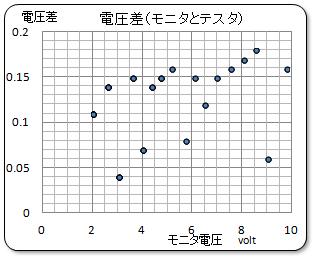
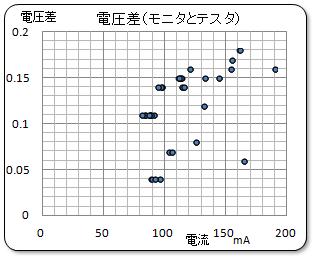
測定は動力車がゲートを通過している時の値を読んでいるが、テスタで表示しているレール面での値が一番変動していた。 このため、読み取りの不確実さもあるが心配していた通りに、電圧降下量は無視できる値とは言い難い結果となった。 電流を流していない状態で実施した前記の測定では、データの違いは 0.02ボルト程度までであったので、測定器の違いとは言えのであろう。 シリアルモニタに表示された値も記録しているので、もう少し正確なデータとしてまとめることは出来るのであるが、それによって問題が解決されるものではないので、実施するのを中止した。
100〜200mA の時に 0.15volt の電圧降下が発生しているということは、約1Ωの抵抗が有ったという事であり、抵抗としては僅かであるが測定の目的からすると影響度合いは無視できないと判断する。 しかし、この供給電圧の測定誤差については、改善課題としておいて、システム検討を進めることにする。