
HOME >> 鉄道模型実験室 > KATO製とTOMIX製の最新式C11型の性能比較
鉄道模型実験室 No.141 KATO製とTOMIX製の最新式C11型の性能比較
■ はじめに
今年の春に新発売されたNゲージの蒸気機関車として、奇しくもほぼ同時発売となった、KATO製とTOMIX製の最新式C11型蒸気機関車の性能比較を実施してみよう。 どちらの車両もコアレスモータを搭載し、Nゲージとしての尺度を守った最新式の構造を有した意欲的なモデルである。 そして、丁度、テーマにして来たPWM制御によるパワーユニットの調査と合わせて、両者の性能特性をPWM制御方式のパワーユニットを使って比較実験してみたのでここに報告する。
ただし、あくまでホビーとしての範疇であり、かつ、測定対象として個体は、自分が上新電機から通信販売にて入手したもの(選別していない固定)であり、それも一台ずつであるため、モデル全体としての比較ではなにの事を明言しておきます。

■ 実験装置
実験装置は、「TOMIX製のC11-325号機の性能特性」にて報告した時と同じ道具を使用している。 即ち、供給電源としては、TOMIX製のパワーユニット N 1001-CL そのものを使用し、動力車を8字パターン方式の測定装置を使って走行させた。 そしてパワーユニットのダイヤルの回転具合を回転ボリュームを使って取り込み入力としている。


■ 測定結果
KATO製C11は、品番が2021のもので、C11-174号機に設定している。 TOMIX製C11は、品番が2643で、C11-325号機である。 そして、比較のために掲載したTOMIX 製 C11 のデータは、前記の報告にて報告したデータを表示スケールを少し変更するなどの手を加えて再掲載している。 そして、2つ並べたグラフのうち、左側にKATO製C11を、右側にTOMIX製C11のデータを示した。
● 速度特性
最初に速度特性から見てみよう。 この測定は、平坦路単機走行状態時のデータである。 即ち、機関車を単体の無負荷状態で走行させ、そのときの速度速度をみるものである。
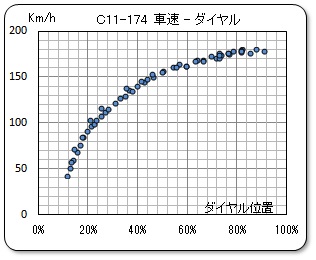
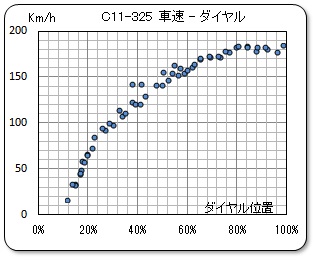
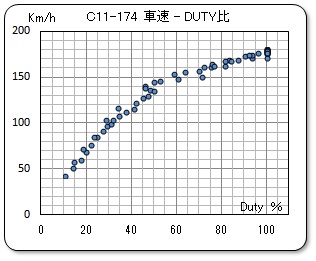
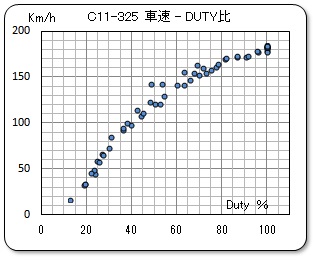
● ダイヤル位置による車速の状態
パワーユニットのダイヤルの回し具合によって車両の速度がどのように調整できるのかを示す。
PWM制御とカレスモータの組み合わせの時に発生する現象により、ダイヤルの回し具合と速度の関係がへ線形となる。このため、低速での速度調整が敏感になっているのである。
KATO製C11では、他のっモデルと同様に、一定の曲線で制御されているが、TOMIX製C11では何だかカクカクとなった変な特性となっている。 原因は不明である。
*******************************************************************************************************************************
上記のダイヤルの回し具合と車両の速度を関係つける各要素について、それぞれの関係を分解して見ていこう。
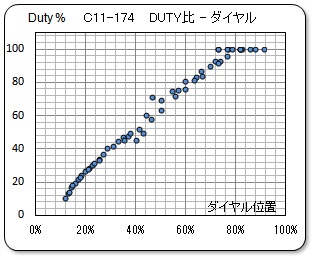
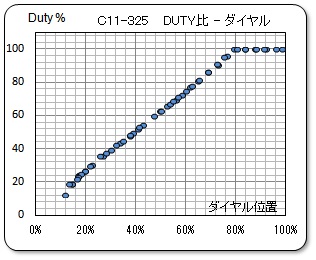
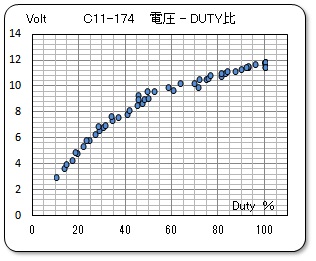
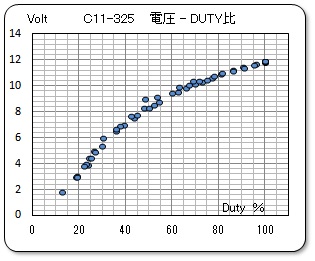
● パワーユニットのダイヤル位置とDUTY比
パワーユニットのダイヤルの回し具合によって、パワーユニットが制御するPWMパルスのDUTY比の発信具合をみてみよう。
ここで、DUTY比はオシロ波形から読み取っている。
DUTY比はパワーユニット内の制御回路で生成されるので、と全ながら、負荷には無関係の関係であるはずだ。
KATO製C11の場合、途中で波形の乱れが発生して、データに乱れがあるが、全体的には同一の特性と言えるだろう。
DUTY比の最小は10%程度であった。
● DUTY比と平均電圧
制御されたPWMパルスによって回路のに生ずる平均電圧は、コアレスモータの回転、即ち、車両の速度をコントロールしている。 そこで、このDUTY比と平均電圧の関係を見てみよう。
電気回路については素人なのでよくわからにが、コアレスモータの仕様の違いによって、この平均電圧の発生具合も違ってくるものと思われる。
最小のDUTY比の場合、KATO製C11とTOMIX製C11では、3ボルトと2ボルト弱の違いが発生している。
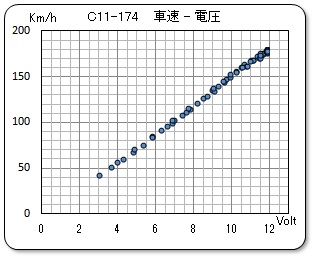
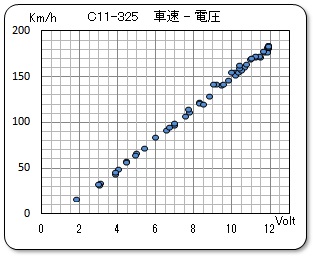
● 平均電圧と速度
回路に発生した平均電圧と車両の速度の関係をみる。 コアレスモータの仕様や、ギヤ比と動輪直径などの伝達機構の仕様によって、この車両速度はことなってくるが、両者共に綺麗な直線関係にある事が分かる。
この設定は、モデル毎の特徴となってくるのであるが、不思議と両者はピッタリである。 と言うことは、両者の設定は同じと言える。 具体的には分解調査やモータ単体の性能測定を実施て、ギヤ比などの諸元を調べれば明らかになるであろう。
KATO製C11の最小スケールスピードは40Km/h程度であるが、これはTOMIX製パワーユニットが10%以下のDUTY比を生成できないためでではないかと判断する。 もし、さらに小さなDUTY比であったなら、もっと低速での走行が可能と思われる。 でも、これは無負荷状態での現象であるので、負荷が掛かっている場合にはさらに低速での走行となるであろう。
これらのデータより、両者の違いは、PWMパルスのDUTY比と平均電圧の関係部分で発生しているものと推察される。
● DUTY比と速度
最後に、DUTY比と速度の関係を見ておこう。 これは次の牽引力特性を測定する場合のパラメータ設定のためにまとめたものである。
**********************************************************************************************************
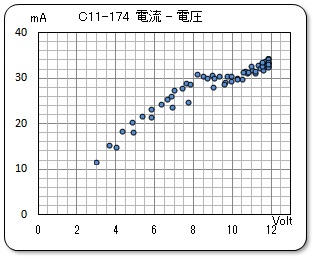
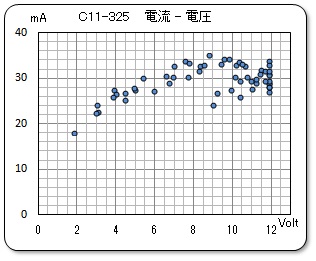
● 消費電流について
無負荷走行時の消費電流も表示して置く。 どちらも低い消費電流のコアレスモータであるので、30mA程度の消費電流である。
TOMIX製C11の場合、低い電圧の場合でも電流が多めであるのは摩擦抵抗などのロスが発生しているものと推察する。
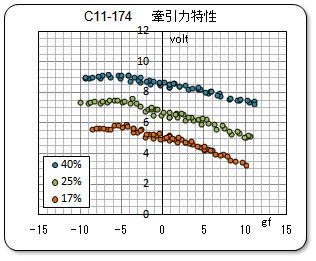
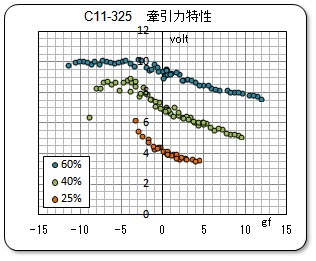
● 牽引力特性
次に、負荷をかけた場合の牽引力特性を測定した。 この実験は、機関車の後ろに重り車両を連結し、測定台を傾斜させて上り坂と下り坂を走行させたものである。 牽引力は、機関車自身の重さと重り車両にによる勾配抵抗に加え、重り車両の走行負荷抵抗を加えたもので計算している。 そして、車両の速度を傾斜台の途中に設けた測定ゲートを通過する時間より計測しているので、車両がスタックしている状態での牽引力は測定不可能なのである。
我が測定方法では、この最大牽引力の値は、特性の頭打ち状態から推察するしかないのである。 しかし、模型としての特性を考えた場合には、スタック状態になる前の状態が重要と考えているので、 これで充分であると認識している。
なお、この特性を測定する場合、今までの安定化電源を使用している場合には、供給電圧をパラメータとして設定していた。 しかし、鉄道模型で使用されているパワーユニットの場合には、その電圧を一定に保持するのか困難であるので、ここでは、PWM制御のDUTY比をパラメータとして設定している。 そして、そのパラメータは、牽引力の値がゼロの時に、スケールスピードが、150Km/h、100Km/h、70Km/h 程度になるように設定するようにしている。 このため、KATO製とTOMIX製の場合ではその設定値が異なっているが、特性のゼロ点ではなくて、負荷に応じて変化していく状態に注目して欲しい。
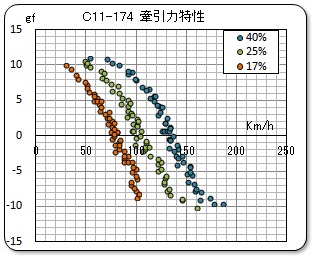
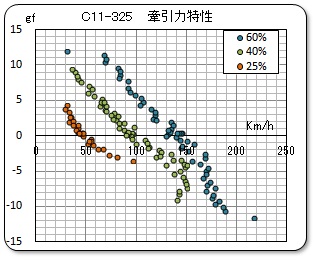
● 牽引力と車速
最も重要視しているのがこの特性である。 牽引力がプラスの場合が駆動状態で、マイナスの場合が制動状態である。そして、駆動負荷が増えるにしたがって速度は低下していき最後には負荷に抗しきれずに止まってしまうのであるが、この状態までは測定できないだ。
制動状態では、後ろから押されている状態なので、速度はダンダン早くなり最後には車輪が滑って止まらなくなるのであるが、坂が登れない状態では、下りの状態も無いのだ。
KATO製とTOMIX製の違いがここでははっきりと現れいる。
KATO製の場合は、今までと同じ見慣れたパターンで違和感がない特性であるが、TOMIX製の場合は おゃ? と思う様相を呈している。 負荷に対する速度の落ち込が大きく、制動領域での変化も極端である。 そして特性パターンが下方向に湾曲しているだ。
一般には負荷が増加すると動輪のスリップ率が増えるために、その分だけ車体の速度が遅くなる。 これは負荷が増えるにしたがって大きくなるので、KATO製のように上に凸の特性カーブになるのである。 スリップ率を測定する必要がありますね!
負荷に対する速度の変化について、KATO製の場合は従来と同様の傾向であるが、TOMIX製の場合はその変化が大きいことが分かる。 これは性能の良し悪しでなくて仕様設定のポリシーに関するものと判断する。
例えば、何両かの貨車や客車を牽引して平坦路を100Km/hで走行させるために、DUTY比を40%に設定した状態でレイアウトを走らせている場合を想定しよう。 平坦路では快調に走行していたが、登り坂になると重い貨車や客車のために30Km/h 程度までもスピードが落ちて、ヒイヒイ言いながら坂を登るのだ。 しかい、今度は同じ程度の下り坂になると、150Km/h の猛スピードで、ルンルン気分で走り下るのである。 これまた鉄道模型としては楽しからずやである。
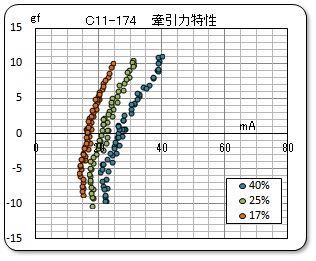
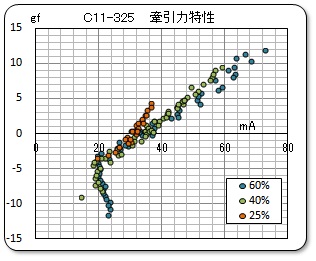
● 消費電流
負荷状態での消費電流を測定する。グラフは同じスケールで表示しているのでその違いは一目瞭然である。
モータ仕様の違いによるものか、あるいは駆動機構上の効率の問題なのかは不明であるが、同じような特性の2つのモデルの差にしては大違いである。 これもモータ単体での調査結果が待たれますね。
● 電圧の変化
PWM制御のパワーユニットとコアレスモータとの組み合わせのの場合、負荷によって平均電圧が変化します。 このためにモータ特性による回転数の変化に加えて、電圧低下による回転数低下が加算されてしまいます。 その電圧変化の様子を示したのがこのグラフです。
KATO製もTOMIX製も同様に変化していますが、TOMIX製の変化の方が不自然な気がします。 原因はなんでしょうね?
制動ゾーンにおいて、-4グラムより左側は一定の値になっていますが、これはウォームギヤの逆効率によって、ブレーキがかかっている状態であり、動輪の制動力とモータのトルクの関係が変化しているためです。 モータを回すトルクはウォームギヤの波面の摩擦抵抗によって、一定値になっている状態と判断しています。
■ 走行状態の動画
最後の測定状態について、実験後に動画を撮影してみました。 DUTY比が17%の状態で、測定台を走行させています。 測定台の勾配はおよそ 70‰ の状態でした。.
登り坂でのロッドの動きを見ていると、力強さを感じますね。

■ まとめ
やはり、KATO製のC11は素晴らしいですね。 ブラボー!
音も静かで、滑らかに走行しています。 鉄道模型は緻密な細工も素晴らしいのですが、走らせる楽しみも必要不可欠と思います。
2017/4/17 作成