
HOME >> 鉄道模型実験室 > TOMIX製のC11-325号機の性能特性
鉄道模型実験室 No.138 TOMIX製のC11-325号機の性能特性
.
■ はじめに
 .
.
TOMIX製のC11-325号機がやっと発売された。 そこで早速性能特性を測定してみたので報告する。 これまで、パワーユニットを知ろう とのシリーズで、種類の異なるパワーユニットと模型車両との関係を調査してきた。 特にPWM制御のTOMIX製パワーユニットN-1001-CL とコアレスモータを搭載した動力車について、注目していた。
PWM制御のパワーユニットとしては、TOMIX製パワーユニットN-1001-CL (と旧品の1000) しか持っていないのでこれを使用している。 車両の方はKATO製のSLシリーズを何種類か持っているが、C56 について先回報告している。 そして、待望のTOMIX 製コアレスモータシリーズが登場したので、同じメーカーの動力車とパワーユニットの組み合わせで測定したのだ。
きっと満足できる性能を発揮してくれると期待して!
本来なら、車体を分解してギヤ比などを調査した後で測定すべきであるが、分解再組付けすると初期性能が変わってしまう恐れがあるので、分解前に測定することにした。
.
■ 実験方法
実際の使用状態を再現するため、動力車を8字パターン方式の測定装置を使って走行させ、供給電源としては、TOMIX製のパワーユニット N 1001-CL そのものを使用した。 そしてパワーユニットのダイヤルの回転具合を回転ボリュームを使って取り込み入力としている。 これらの測定システムは先回の報告と同じ状態である。


そして、PWM制御のDUTY比は、オシロで観察した波形をメモリに記録し、画面に示されたDUTY比の値をグラフに取り込んでデータを整理している。
■ 速度特性の測定結果
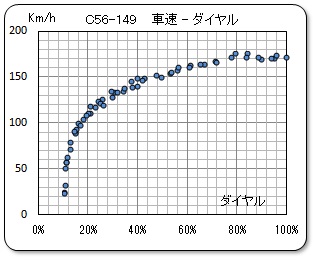
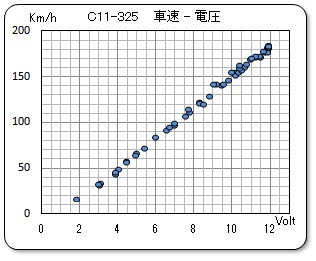
まず、平坦路の単機走行状態で、速度特性を測定した。 パワーユニットのダイヤルの回し具合によって、動力車の速度調整がどのようにコントロールできるかを知るためである。 比較のために、先回報告したコアレスモータを搭載しているKATO製のC56-149号機のデータを併記して見比べることにした。
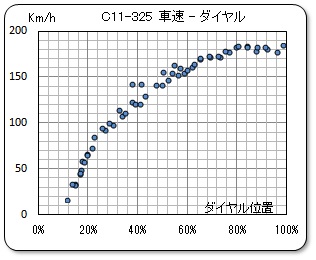
横軸はTOMIX製のパワーユニット N 1001-CL のダイヤルの回転具合で、左いっぱいをゼロとし、右一杯を100とした目盛と考えてください。 ここでは、同じパワーユニットを使用しているので、上記の特性の違いは、車両側の違いと考えてよいでしょう。
最高速度などの全体的な特性は両者ともに似ていますが、低速領域では多少異なっています。 TOMIXのC11は低速側の変化具合が、勾配の異なる二つの直線を組み合わせたように変化をしており、何か不自然な様相です。 一方のKATOのC56は、数学的な曲線のようで、特性的には自然な気がします。
使い方としては、ダイヤルの回し具合に対して速度変化が少し直線的なTOMIXのC11の方が使い易いかもしれませんが、実際にはどうでしょうか。
この車速 - ダイヤル特性について、特性のつながりを考えると、
ダイヤルの位置 ⇒ ユニットの可変抵抗値 ⇒ PWM制御のDUTY比 ⇒ モータの回転による平均電圧 ⇒ 車速
とつながっているはずです。 そこで、この関係特性をグラウ化してみました。 C56との比較は上下に並べています。
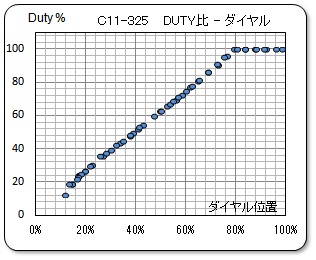
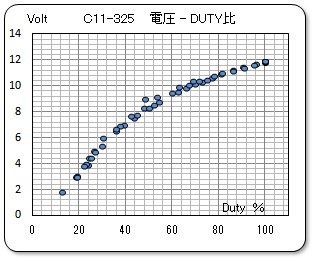
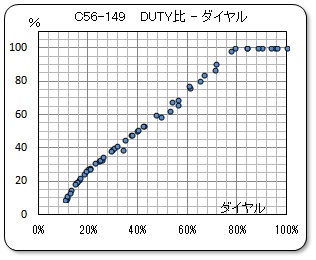
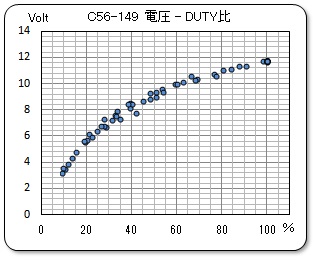
ダイヤル位置とDUTY比はパワーユニットの制御回路によるものと考えれれるので、同一と考えて良いでしょう。 このDUTY比から生じる平均電圧は、コアレスモータを回す時に現れる様々な現象によって現れるので、コアレスモータとしての特徴が出ていると判断できます。 しかし、その違いは現在の自分の技術力では判断できません。
また、平均電圧と車速の関係は、モータの仕様やギヤ比、動輪直径などによって異なってきますが、よく似た特性ですね。 結局は、TOMIXとKATOのコアレスモータ動力車の違いは、ハッキリとした違いは無いと言えるのでしょうね。
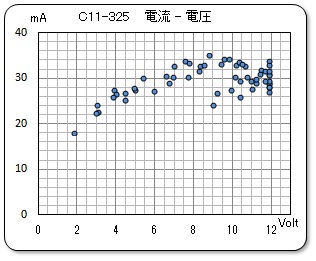
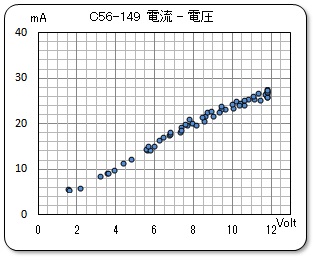
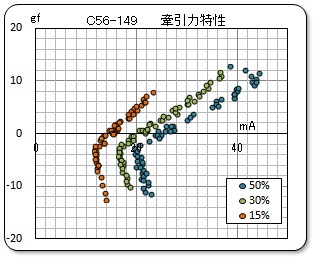
電流特性を下に示す。 これは明らかにKATOのC56の方が優秀で安定していますね。 メカ機構の差が出来ているようです。、
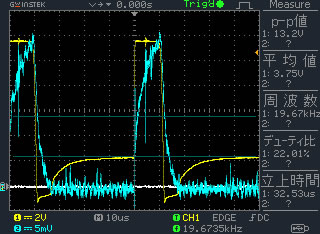
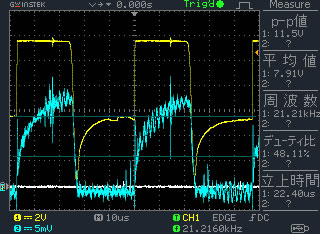
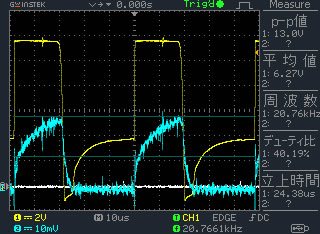
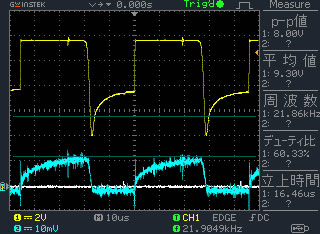
DUTY比を読み取るために保存したオシロ画面の一部を下に示す。 CH1(黄色)は電圧を、CH2(青色)は電流を示す。 測定場所は先回の報告と同じ場所で、平均電圧や平均電流を計測するための平滑回路の前の部分で測定し、波形の表示は平均回数を8に設定して、ノイズの表示を抑えています。 電流は0.22Ωのシャント抵抗の電圧降下値で計測しているために、ノイズの多い波形となっています。
波形で注目するポイントは、パルス立下り後のフリーホイール電流の動きです。 回転数に比例する逆起電圧、電圧遮断後に発生するフリーホイール電流、その電流を戻すフリーホイールダイオードの関係を頭に於いてみていくと、より理解が深まると思います。

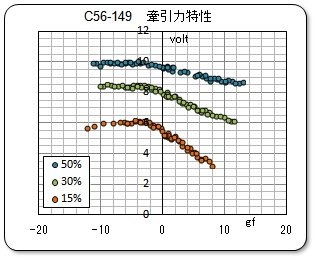
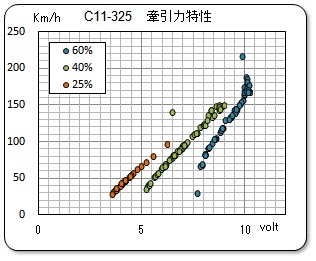
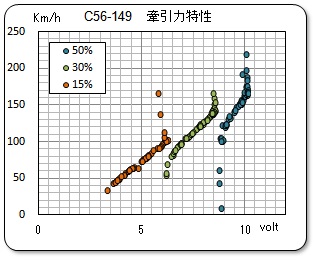
■ 牽引力特性の測定結果
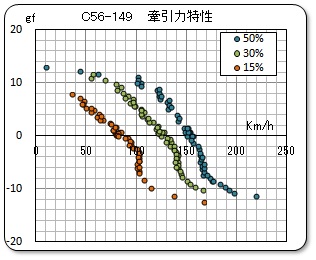
次に、牽引力特性を測定した。 動力車に重り車両を牽引させ測定台を傾斜させて測定を実施した。 測定結果を下に示す。 パラメータの設定方針を間違えてしまって比較しずらいが、TOMIXのC11は、負荷に対する速度の落ち込みが大きいようである。 摩擦領域での牽引力は両者共に 12 グラム程度を有している。 しかし、無負荷では150Km/hもあったスピードが、10グラムの負荷になるとKATOでは100Km/hは確保されているのに、TOMIXでは70Km/h近くまで落ち込んでいる。
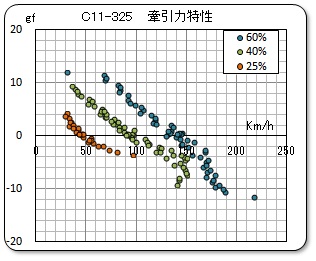
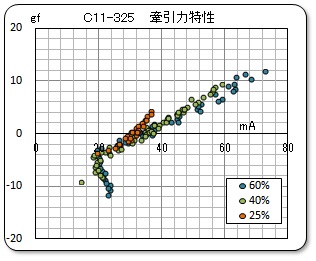
上のグラフは、牽引力と電流の関係を示したものである。 同じ牽引力を出すにしても、TOMIXのC11はKATOのC56よりも倍以上の電流を食っていることになるが、これはメカ機構の効率が悪いと想定される。 ウォームギヤの噛合い状態が遷移する遷移点の値も、マイナス4グラムもあり、KATOよりも大きい。 これは駆動機構の摩擦抵抗が大きい事を示しているのである。 「特性線図から何が読み取れるか その1」参照。
次に、下に示すようなグラフを作成しているので、参考にしてください。
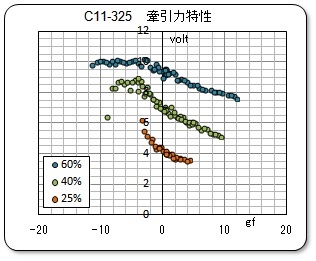
今回のパワーユニットを用いた測定では、ダイヤル位置を固定した状態で、負荷を変化させながら測定しています。 即ち、PWM制御方式でのパワーユニットでは、ダイヤル位置を固定、即ちDUTY比を一定にした場合の条件ですので、その時の平均電圧は変化しているはずです。 その電圧と負荷との関係を整理し直なおしたグラフを下に示す。 負荷が増えると平均電圧はグート落ち込んで来ます。 このために、速度の低下はより一層大きくなるのです。 この傾向は、KATOのC56よりもTOMIXのC11の方が大きいようです。
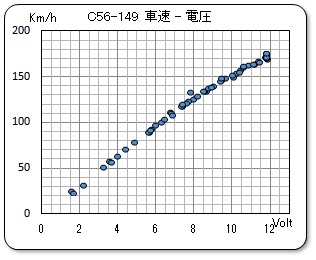
また、電圧と車速の関係グラフは、一直線上に並ぶはずであるが、これがモータ回転数であればそうなるであろうと想定する。 しかし、車両となると動輪のスリップ要素が加味されるので、駆動域では速度は低くなり、制動位置では増加するのである。
TOMIXのC11はトラクションタイヤを履いた動輪が4輪あるので、スリップ具合が小さいのではと想定したが、各線図が離れていることからスリップが小さいとは言い切れないようだ。 詳しくはモータ回転数を測定してスリップ率を算定する必要があるようですな。
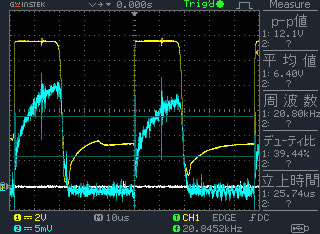
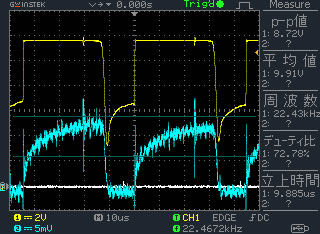
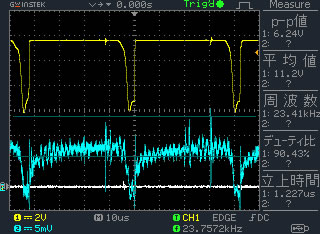
今回もオシロ波形を記載しておきます。 3種類のDUTY比の違い、および上り坂(上段)と下り坂(下段)の場合を記載しております。
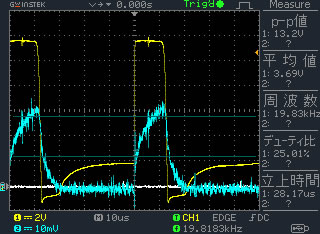
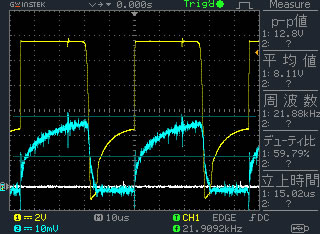
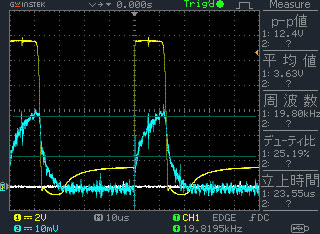
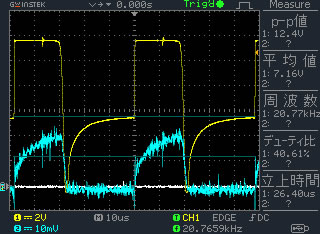
C56の場合とは比較していませんが、これらの波形から何を読み取る事ができるのか、自分にも充分には理解できていません。
■ 測定中の状態
特性データを測定中に、データに現れないトラブルを報告しておこう。
- 1) 先輪がたびたび脱線する
- 測定台上のポイントやクロス部分で、先輪がたびたび脱線するトラブルが発生した。 線路上の段差などに刺激されて先輪がピヨンと脱線してしまうのである。 先輪台車を抑えるバネが緩いと思われる。 台車と車体との間にコイルバネが装着されているが、車体のピッチングを考えると台車に重りを付けて重くするする方法がベターなのであるが、そのスペースも無かった。 そこで、台車抑えのレバーと台車の間に厚さ0.5mm のプラ板を両面テープで貼り付けて、台車の跳ね上がりを少しでも防止するようにした。 ポイント部分での脱線は防止出来たが、クロス部分での脱線は車体がピッチングするので完全ではなかった。 面倒でもいちいち脱線を戻しながら測定を続行した。
- 2) 低速では動きがギクシャクする
- 測定を続行しているうちに、慣らし運転の結果かもしれないが少しは改善させたようである。 しかし、25%DUTY での測定中にたびたび停止してしまう事態が発生している。 初期の状態を撮影した動画を紹介しよう。
- 測定台上の電圧計の表示を見ると5〜8ボルトを表示しているので、スケール速度で80〜120Km/h の状態であったと推察する。 線路もしっかりクリーニングしているので、やはり集電不良と推察する。
■ まとめ
ブログにて投稿されている方々と同様に、大満足の結果とは言い難いですね。 2012年に発売されたKATOのC56と比較しても優っているとは言えないと思います。 あえて言うならば、5年以上の開きがありますね。
PWM制御でないパワーユニット、または安定化電源にて測定してみるとどのような結果になるだろうかと興味が湧きますが、これは、PWM制御とコアレスモータの組み合わせを否定すること、即ち時代の流れに逆らうことにもなりかねませんので期待しない方が良いかもしれません。
2017/4/2 作成