
丂丂HOME >> 揝摴柾宆幚尡幒丂>丂Arduino Uno 偺PWM僉儍儕傾廃攇悢傪20kH倸偵偡傞
揝摴柾宆幚尡幒 No.157 丂Arduino Uno 偺PWM僉儍儕傾廃攇悢傪20kH倸偵偡傞
丂暿幒偺僽儘僌偵偰丄摨偠僥乕儅偱幚巤曽朄傪曬崘偟傑偟偨丅丂偟偐偟偦偺撪梕偼丄偙偆偟偨傜弌棃傑偟偨偲偄偆扨側傞 僲僂僴僂 偲偟偰曬崘偟傑偟偨丅丂偱傕丄側偤偙偆偡傟偽弌棃偨偺偐丠丂偦傟偧傟偺愝掕抣偼偳傫側堄枴偑偁傞偺偐丠丂側偳丄僲僂儂儚僀丠丂偺晹暘偵偮偄偰丄帺暘偑棟夝偟偨撪梕偵増偭偰婰榐偟偰偍偔偙偲偵偟傑偟偨丅
仭丂Arduino Uno 偵偍偗傞PWM惂屼偺愝掕曽朄
丂偄傠偄傠側僱僢僩忣曬傪傕偲偵丄 Arduino Uno 偺CPU偱偁傞 ATmega328P 偺 DATASHEET 傪昍夝偒丄PWM惂屼偵娭偡傞晹暘傪挱傔傑偟偨丅丂偦偟偰壗偲偐偦偍摦偒傪棟夝偡傞偙偲偑弌棃傑偟偨偑丄傑偩傑偩晄廫暘偱偡丅丂懠偺僱僢僩忣曬偲崌傢偣偰帺暘側傝偵傑偲傔偨儗億乕僩傪徯夘偟傑偡丅
丂丂丂丂丂丂丂丂PWM惂屼偺棳傟偲巜掕曽朄丂佀丂ATnega329-PWM.pdf
丂偙偺撪梕傪梫栺偟傑偡丅丂傑偢丄CPU傪摦偐偟偟偰偄傞儊僀儞偺僋儘僢僋怣崋傪傪傕偲偵丄僞僀儅乕傪僇僂儞僩偟偰偄偒傑偡丅丂僞僀儅乕丄抶墑柦椷丄PWM側偳偺帪娫偵娭偡傞婡擻偼偙偺僞僀儅乛僇僂儞僞偑拞怱偲側偭偰嶌摦偟偰偄偒傑偡丅
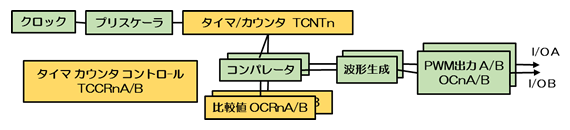
丂偦偟偰丄偙偺僞僀儅乕偼偦偺儌僨儖偵傛偭偰丄撈棫偟偨暋悢偺僞僀儅乕傪傕偭偰偍傝傑偡丅丂傑偨丄CPU傪嶌摦偝偣偰偄傞僋儘僢僋偼儊僈僆乕僟乕偺懍偄偟僒僀僋儖偱摦偄偰偄傑偡偺偱丄僾儕僗働乕儔偲屇偽傟偰偄傞尭懍憰抲傪捠偟偰嶌摦偝偣偰偄傑偡丅
丂偙偺丄僞僀儅乛僇僂儞僞偱偼丄尭懍偝傟偨怣崋傪傕偲偵僇僂儞僞傪嶌摦偝偣偰丄僇僂儞僩傾僢僾偟偰偄偒丄僆乕僶乕僼儘乕偡傞偲傑偨僛儘偐傜僇僂儞僩偡傞帠偵傛偭偰丄僲僐僊儕攇忬偺怣崋傪嶌傞偙偲偑弌棃傑偡丅丂偙偺廃婜偑PWM惂屼偺偨傔偺僉儍儕儎廃攇悢偲側傝傑偡丅
丂偙偺僇僂儞僩傾僢僾偟偰偄傞搑拞偱丄偁傞愝掕抣偵側傞偲怣崋傪弌偟丄偦偺愝掕偵側傝傑偟偨偲偄偆怣崋傪傕偲偵僷儖僗攇宍傪惗惉偡傞偲丄PWM怣崋偑弌棃忋偑傝傑偡丅丂偙偺愝掕抣偑僨儏乕僥傿斾傪寛傔傞悢抣偱偁傝丄僇僂儞僞偺悢抣偲斾妑偡傞栶妱偑僐儞僷儗乕僞偱偡丅丂偦偟偰丄偙偺斾妑偲僷儖僗惍宍儖乕僩偼丄堦偮偺僇僂儞僞偐傜俀僠儍僱儖愝掕偝傟偰偍傝丄偦傟偧傟撈棫偟偰愝掕丒惂屼偝傟傑偡丅
丂偙傟傜偺忬懺傪僐儞僩儘乕儖偡傞儗僕僗僞偑丄僞僀儅 僇僂儞僞 僐儞僩儘乕儖偲尵傢傟偰偄傞儗僕僗僞偱丄偙偙偺價僢僩傪偦傟偧傟愝掕偡傞偙偲偵傛偭偰丄偙傟傜偺婡擻傪愝掕偡傞偙偲偑偱偒傞偺偱偡丅丂椺偊偽僾儕僗働乕儔偺暘廃斾傪偄偔偮偺愝掕偡傞偺偐丄僲僐僊儕攇偱側偔偰嶰妏攇偵偟偨偄丄僐儞僷儗乕僞偺嶌摦撪梕傪曄偊偨偄丄偲偐怓乆側儊僯儏乕偑梡堄偝傟偰偄傑偡偺偱丄偙傟傜偺愢柧彂傪昍夝偔昁梫偑偁傞偺偱偡丅
丂慺恖偑塢乆偡傞傛傝傕丄徻偟偄撪梕偵偮偄偰偼愱栧偺曽偵偍擟偣偟偰丄PWM僉儍儕儎攇偺廃攇悢傪20kHz 偵愝掕偡傞曽朄傪専摙偟偰傒傑偟傚偆丅
仭丂20kHz 偵愝掕偡傞曽朄
丂傑偢丄僲僐僊儕攇偐嶰妏攇偐偺慖戰傪寛傔偰偍偒傑偟傚偆丅丂忋婰偺帒椏偺拞偵恾偱愢柧偟偰偁傝傑偡偑丄Fast PWM 偲 Phase Correct PWM 丄偁傞偄偼丄僔儞僌儖僗儘乕僾偲僨儏傾儖僗儘乕僾丄僄僢僕傾儔僀儞儌乕僪偲僙儞僞乕傾儔僀儞儌乕僪偲傕屇偽傟偰偍傝丄僷儖僗偵埵憡偑嫸偆偲栤戣偵側傞壒嬁娭學側偳偵巊梡偝傟傞応崌偵梡堄偝傟偰偄傞僒乕價僗偺傛偆偱偡偑丄扨側傞儌乕僞惂屼偱偁傞揝摴柾宆偺惂屼偱偼偦偺慖戰偼娭學側偄偲巚偄傑偡丅丂偨偩丄嶰妏攇偵側傝傑偡偲愢柧恾偐傜傕暘偐傞傛偆偵丄廃攇悢偼敿暘偵側偭偰偟傑偄傑偡丅丂Uno偺応崌傕丄976Hz偲490Hz偺俀庬椶偁傞偺偼偙偺偨傔偱偡丅丂偦偙偱丄僲僐僊儕攇丄懄偪 Fast PWM 儌乕僪傪慖戰偟傑偟傚偆丅
丂師偵丄僲僐僊儕攇偺僩僢僾偺抣傪慖戰偡傞昁梫偑偁傞偺偱偡丅丂俉價僢僩僞僀儅乕偱偡偲僩僢僾抣偼 255 偱偡丅丂16價僢僩僞僀儅乕偼 255亊255 偱偡偑丄偙偺抣傑偱摓拝偡傞帪娫偼俉價僢僩偺255攞丄懄偪廃攇悢偼1/255偲側偭偰栚揑偲偼媡偺曽岦偱偡丅丂懄偪丄俉價僢僩偺僩僢僾抣 255 偱廩暘側偺偱偡丅 丂偝傜偵婐偟偄婡擻偲偟偰丄偙偺僩僢僾抣傪巜掕偡傞帠偑弌棃傞偺偱偡丅丂255傑偱僇僂儞僩傾僢僾偣偢偵搑拞偱愜傝曉偡偺偱偡丅丂偡傞偲丄偦偺暘偩偗愜傝曉偟帪娫偑懍偔側傝傑偡偐傜廃攇悢傕崅偔偡傞偙偲偑弌棃傞偺偱偡丅
丂傕偆傂偲偮偺廳梫側愝掕偼丄僾儕僗働乕儔偺攞棪傪曄峏偡傞帠偱偡丅丂Uno 応崌偼丄暘廃斾偑 64 偵愝掕偝傟偰偄傑偡偺偱丄僋儘僢僋廃攇悢 16MHz 傪 1/64 攞偟偰僇僂儞僞傪僇僂儞僩傾僢僾偟偰偄偔偺偱偡偑丄偙偺暘廃斾傪彫偝偔偡傞偲憗偔僇僂儞僩傾僢僾偡傞偺偱丄廃攇悢偼傾僢僾偟傑偡丅
丂椺偊偽丄暘廃斾32側傜1.95倠Hz乮懌傝側偄両乯丄暘廃斾8側傜7.81倠Hz乮傑偩懌傝側偄両乯丄暘廃斾1側傜62.5倠Hz乮憗偡偓傞両乯丄偲尵偆偙偲偱慱偄偳偆傝偺廃攇悢偵愝掕偱偒傑偣傫丅丂偙偺拞娫偺抣偺慖戰巿偑柍偄偺偱偡丅
丂偙偺偨傔丄巆傞庤抜偼僲僐僊儕攇偺僩僢僾抣傪掅偔愝掕偟偰丄憗傔偵愜傝曉偡曽朄偟偐偁傝傑偣傫丅丂偄偔偮偵愝掕偡傞偲椙偄偺偱偟傚偆偐丠
丂暘廃斾傪俉偵愝掕偡傞偲丄255偱7.81倠Hz偱偡偐傜丄255亊7.8亐20 佮 99 偲側傝傑偡丅丂懄偪丄99傑偰僇僂儞僩偡傞偲愜傝曉偡條偵偡傞偲 20kHz 偑弌傞偙偲偵側傝傑偡丅
丂偙偺傛偆側彫偝側悢帤偱椙偄偺偱偟傚偆偐丠丂僐儞僷儗乕僞偱偼丄斾妑偡傞悢抣傪巜掕偡傞儗僕僗僞丄懄偪斾妑抣丂OCRnA/B 偺抣偲斾妑偟傑偡偺偱丄偙偺抣偲99偺斾偱僨儏乕僥傿斾偑愝掕弌棃傞偺偱偡丅丂尵偄姺偊傞偲1亾偺嬫愗傝偱僨儏乕僥傿斾偑惂屼弌棃傞偺偱偡丅丂揝摴柾宆偺懍搙惂屼偱偼廩暘側愝掕偱偡偹両
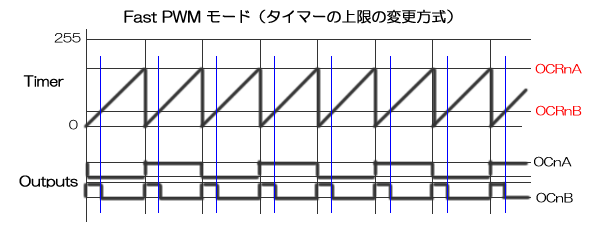
丂偙偙偱丄朰傟偰偼偄偗側偄戝愗側帠偑偁傝傑偡丅丂僲僐僊儕攇偺僩僢僾抣偼A僠儍僱儖偺戝愗側儗僕僗僞 OCRnA 傪巊梡偡傞偲尵偆偙偲偱偡丅 丂偙偺儗僕僗僞傪巊偭偰偟傑偆偲偙偺僠儍僱儖偐傜PWM怣崋傪弌椡偡傞偙偲偑偱偒傑偣傫丅丂偨偩偟丄愝掕偵傛偭偰偼忋偺恾偺傛偆偵丄僷儖枅偵斀揮偝偣偰丄敿暘偺廃攇悢偺僡儏乕僥傿斾50亾偺僷儖僗攇傪惗惉偝偣傞偙偲傕弌棃傞偺偱偡偑丄棙梡壙抣偑偁傝傑偣傫丅丂偙偺億乕僩傪嶦偟偰偄傞偺偲曄傢傜側偄偺偱偡丅
仭丂儗僕僗僞偺幚嵺偺愝掕抣
丂奺儗僕僗僞偺愝掕曽朄偑棟夝弌棃傑偟偨偺偱丄PWM僉儍儕廃攇悢偺20kHz 壔偵挧愴偟偰傒傑偟傚偆丅
丂傑偡丄Arduino Uno 偵偼僞僀儅乕偑俁屄偁傝傑偡偺偱丄偦傟偧傟偺僞僀儅枅偵愝掕偡傞昁梫偑偁傝傑偡丅丂偦偺愝掕撪梕偼丄
- 暘廃斾偼俉偲偡傞丅
- 攇宍偼僲僐僊儕攇丄懄偪丄Fast PWM 儌乕僪偲偟丄僲僐僊儕攇偺僩僢僾抣傪愝掕偡傞曽幃偲偡傞丅
- 僩僢僾抣偼 99 偲偡傞丅
- 僠儍僱儖B偺弌椡儌乕僪偼丄堦斒揑側旕斀揮儌乕僪偲偡傞丅
偲偟丄奺僞僀儅乕偺愝掕曽朄偵崌傢偣偰丄僞僀儅 僇僂儞僞 僐儞僩儘乕儖 儗僕僗僞 TCCRnA/B 傪愝掕偡傞丅 偦偺條巕傪壓偺堦棗昞偵帵偡丅
| 僞僀儅侽 | TCCR0A | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|
| COM0A1 | COM0A0 | COM0B1 | COM0B0 | * | * | WGM01 | WGM00 | ||
| TCCR0B | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| FOC0A | FOC0B | * | * | WGM02 | CS02 | CS01 | CS00 | ||
| 攇宍惗惉儌乕僪偺愝掕 | Mode | WGM02 | WGM01 | WGM00 | 堄枴 | TOP | |||
| 7 | 1 | 1 | 1 | Fast PWM | OCR0A | ||||
| 僋儘僢僋偺慖戰 | CS02 | CS01 | CS00 | 堄枴 | |||||
| 0 | 1 | 0 | 暘廃斾丂8 | ||||||
| 斾妑弌椡儌乕僪偺愝掕 | COM0A1 | COM0A0 | D6偺惂屼 | ||||||
| 0 | 1 | WGM02=0丗捠忢偺億乕僩摦嶌丄OC0A偼愗抐丄WGM02=1丗斾妑堦抳偱OC0A傪愗懼 | |||||||
| COM0B1 | COM0B0 | D5偺惂屼 | |||||||
| 1 | 0 | 斾妑堦抳偱OC0B傪僋儕傾丄OC0B傪BOTTOM偵愝掕乮旕斀揮儌乕僪乯丅 | |||||||
| 僞僀儅侾 | TCCR1A | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| COM1A1 | COM1A0 | COM1B1 | COM1B0 | * | * | WGM11 | WGM10 | ||
| TCCR1B | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| ICNC1 | ICES1 | * | WGM13 | WGM12 | CS12 | CS11 | CS10 | ||
| TCCR1C | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| FOC1A | FOC1B | * | * | * | * | * | * | ||
| 攇宍惗惉儌乕僪偺愝掕 | Mode | WGM13 | WGM12 | WGM11 | WGM10 | 堄枴 | TOP | ||
| 15 | 1 | 1 | 1 | 1 | Fast PWM | OCR1A | |||
| 僋儘僢僋偺慖戰 | CS12 | CS11 | CS10 | 堄枴 | |||||
| 0 | 1 | 0 | 暘廃斾丂8 | ||||||
| 斾妑弌椡儌乕僪偺愝掕 | COM1A1 | COM1A0 | 堄枴 | ||||||
| 0 | 1 | 斾妑堦抳偱OC1A傪愗懼丅 | |||||||
| COM1B1 | COM1B0 | 堄枴 | |||||||
| 1 | 0 | 斾妑堦抳偱OC0B傪僋儕傾丄OC0B傪BOTTOM偵愝掕乮旕斀揮儌乕僪乯丅 | |||||||
| 僞僀儅俀 | TCCR2A | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| COM2A1 | COM2A0 | COM2B1 | COM2B0 | * | * | WGM21 | WGM20 | ||
| TCCR2B | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| FOC2A | FOC2B | * | * | WGM22 | CS22 | CS21 | CS20 | ||
| 攇宍惗惉儌乕僪偺愝掕 | Mode | WGM22 | WGM21 | WGM20 | 堄枴 | TOP | |||
| 7 | 1 | 1 | 1 | Fast PWM | OCR2A | ||||
| 僋儘僢僋偺慖戰 | CS22 | CS21 | CS20 | 堄枴 | |||||
| 0 | 1 | 0 | 暘廃斾丂8 | ||||||
| 斾妑弌椡儌乕僪偺愝掕 | COM2A1 | COM2A0 | 堄枴丂丂D11偺惂屼 | ||||||
| 0 | 1 | WGM22=0丗捠忢偺億乕僩摦嶌丄OC2A偼愗抐丄WGM22=1丗斾妑堦抳偱OC2A傪愗懼 | |||||||
| COM2B1 | COM2B0 | 堄枴丂丂D3偺惂屼 | |||||||
| 1 | 0 | 斾妑堦抳偱壛嶼帪偵OC2B傪僋儕傾丄尭嶼帪偵OC2B傪愝掕丅 | |||||||
// Uno 20KHzPWM test
// 2020.4.3
#include <avr/io.h>
void setup() {
pinMode(3,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
TCCR0A = 0b01100011;
TCCR0B = 0b00001010;
OCR0A = 99;
TCCR1A = 0b01100011;
TCCR1B = 0b00011010;
OCR1A = 99;
TCCR2A = 0b01100011;
TCCR2B = 0b00001010;
OCR2A = 99;
}
void loop() {
int vol=20;
// OCR0B = vol;
// OCR1B = vol;
// OCR2B = vol;
analogWrite(5,vol);
analogWrite(10,70);
analogWrite(3,40);
}
丂偦偟偰丄奺儗僕僗僞偺價僢僩偺抣傪傑偲傔傞偲壓婰偺條偵側傝傑偡丅丂
儗僕僗僞柤 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
TCCR0A |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
TCCR0B |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
TCCR1A |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
TCCR1B |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
TCCR2A |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
TCCR2B |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
偙傟傪丄僗働僢僠偵彂偒崬傓応崌偺婰弎曽朄偼丄
TCCR0A = 0b01100011;
TCCR0B = 0b00001010;
TCCR1A = 0b01100011;
TCCR1B = 0b00011010;
TCCR2A = 0b01100011;
TCCR2B = 0b00001010;
偲側傝傑偡丅丂傑偨丄僩僢僾抣偺巜掕偼丄
丂OCR0A = 99;
丂OCR1A = 99;
丂OCR2A = 99;
偱偡丅丂偦偟偰丄PWM偺弌椡億乕僩偼丄僞僀儅侽偺B僠儍僱儖偱偁傞D5丄僞僀儅侾偺B僠儍僱儖偱偁傞D10丄僞僀儅俀偺B僠儍僱儖偱偁傞D俁偐傜弌椡偝傟傑偡丅
丂僗働僢僠偵婰弎偡傞応崌偼丄塃偺條偵婰弎偟傑偡丅
丂偦偟偰丄僨儏乕僥傿斾偺巜掕偼丄B僠儍僱儖偺OCRnB儗僕僗僞偵偦偺抣傪塃偺傛偆偵彂偒崬傒傑偡丅丂摉弶偼儗僕僗僞偵捈愙巜帵偟偰偄傑偟偨偑丄analogWritr( ) 偺柦椷偑巊偊傑偟偨偺偱丄偙偪傜偺婰弎偱傕OK偱偡丅
丂*************************************************************************** *****丂analogWritr( ) 偺婰弎帪偺拲堄帠崁傪捛婰偟傑偡丅丂丂丂丂************* 丂***************************************************************************
丂analogWritr( ) 偺婰弎帪偺拲堄帠崁傪捛婰偟傑偡丅
丂崱夞偺張棟偼丄僲僐僊儕攇偺僩僢僾偺抣傪 255 偐傜 99 偵曄峏偟偰20kHz 壔傪幚巤偟偰偄傑偡丅丂廬偭偰僨儏乕僥傿斾偺巜掕偼侽乣99傑偱偟偐巜掕偱偒傑偣傫丅丂偙偺偨傔丄僗働僢僠偱偺analogWritr( ) 偺僐儅儞僪偼巊梡偱偒傞傕偺偺丄偦偺巜掕抣偵偼拲堄偑昁梫偱偡丅丂99埲忋偺抣偼柍岠側偺偱丄寢壥揑偵偼僨儏乕僥傿斾100亾偺忬懺偵側傞傕偺偲悇掕偟傑偡乮枹妋擣偱偡偑丒丒丒丒丒乯丅
丂偟偐偟岾偄側偙偲偵丄侽乣99傑偱偱 侽乣100亾傪巜掕偡傞偙偲偵側傞偺偱丄僨儏乕僥傿斾偺僷乕僙儞僩昞帵偦偺傑傑偺抣傪巊梡偡傟偽椙偄帠偵側傝傑偡丅
丂*********************************************************丂丂2021/5/2 捛婰丂***************************************************
仭丂幚嵺偺娤應寢壥
丂偦傟偱偼幚嵺偵Arduino Uno 偵彂偒崬傫偱僷儖僗攇宍傪娤嶡偟偰傒傑偟傚偆丅

丂偦傟偧傟偺億乕僩弌椡偺攇宍偱偡丅
 |
 |
慱偄偳偆傝偵 20kHz 偺PWM攇宍偑弌椡偝傟偰偄傑偡丅 傑偨丄奺億乕僩娫偺攇宍偺棫偪忋偑傝僞僀儈儞僌偼丄偐側傝僪儕僼僩偟偰偄傑偡丅丂摿偵D10億乕僩偼戝偒偔棧傟偰偄傑偡丅 |
| CH侾偼D10億乕僩丄CH俀偼D俁億乕僩偱偡丅 | CH侾偼D俆億乕僩丄CH俀偼D俁億乕僩偱偡丅 | |
 |
 |
A僠儍僱儖偺弌椡傕僠僃僢僋偟偰傒傑偟偨丅傗偼傝丄敿暘偺廃攇悢偱丄50亾僨儏乕僥傿偺PWM攇宍偱偡丅 摨偠僞僀儅乛僇僂儞僞傪巊梡偟偰偄傞偨傔丄棫偪忋偘儕僞僀儈儞僌偼僺僞儕偲堦抳偟偰偄傑偡丅 |
| CH侾偼D俋億乕僩丄CH俀偼D10億乕僩偱偡丅 | CH侾偼D俇億乕僩丄CH俀偼D俆億乕僩偱偡丅 |
仭丂傑偲傔
丂Arduino Uno 偱傕 20kHz 偺PWM攇宍傪弌椡偝偣傞帠偑弌棃傑偟偨丅丂偟偐偟丄栤戣揰偲偟偰丄
- 惓忢偵弌椡偟偰偄傞 D3丄D5丄D10 億乕僩娫偺攇宍傪娤嶡偡傞偲丄攇宍偛偲偵僞僀儈儞僌偑僘儗偰偄傞帠偑暘偐傝傑偡丅丂偦偟偰丄儕僙僢僩傪妡偗偰傕偦偺忬懺偑曄傢傜側偐偭偨偺偱丄偙偺僞僀儈儞僌偺僘儗偼撪晹揑側昁慠偲巚傢傟傑偡丅丂僞僀儅乕/僇僂儞僞偱偺張棟曽朄偺堘偄偵傛偭偰惗偠偰偄傞傕偺偲悇嶡偟偰偄傑偡丅
- 弌椡億乕僩偲摨偠僞僀儅傪巊梡偟偰偄傞偨傔丄D俇丄D俋丄D11億乕僩偼PWM惂屼偲偟偰偺婡擻傪壥偨偟偰偄傑偣傫丅丂懠偺梡搑偵傕巊偊側偄偺偱丄巊梡晄壜偺億乕僩偲側偭偰偄傑偡丅
丂偙偺偨傔丄帺暘偑巊偄偨偄揝摴柾宆偺帺摦塣揮惂屼梡僐儞僺儏乕僞偲偟偰偼丄晄岦偒偱偁傞偲寢榑偟傑偟偨丅丂傕偟丄偁偊偰巊偆偲偡傞側傜偽丄壗傜偐偺岺晇偑昁梫偲側傞偱偟傚偆丅
儁乕僕僩僢僾傊栠傞丂丂.
丂2020/4/4丂嶌惉丂2021/5/2 捛婰