
HOME >> 鉄道模型実験室 > パワーユニットを知ろう 電圧と電流の波形
鉄道模型実験室 No.132 パワーユニットを知ろう 電圧と電流の波形
 .
.
■ はじめに
パワーユニットを知ろう の第5弾として、負荷状態におけるパワーユニットの電圧と電流の波形を調べることにした。
■ 測定方法
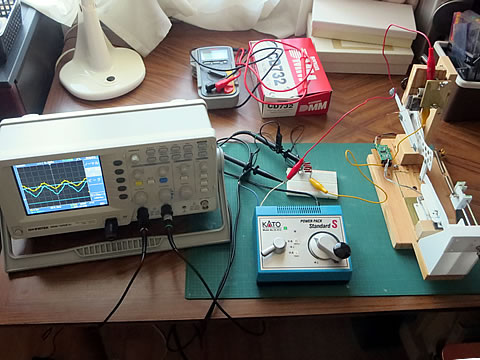
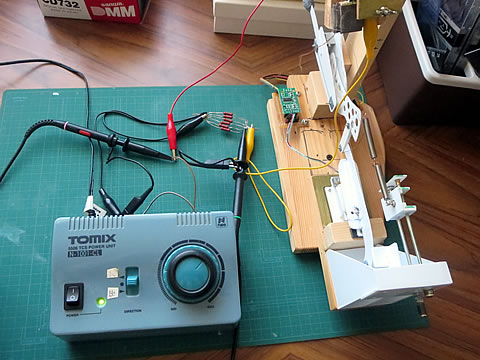
用意した道具は、テストするパワーユニット、モータ、その負荷装置、オシロ、および電流を測定するための抵抗回路である。 その結線状態を右に示す。 モータは先回と同様にジャンク品2を使っている。 モータ特性の詳しい測定をするわけではないので、特性測定用のArduin0 やシールドは今回は使用していません。
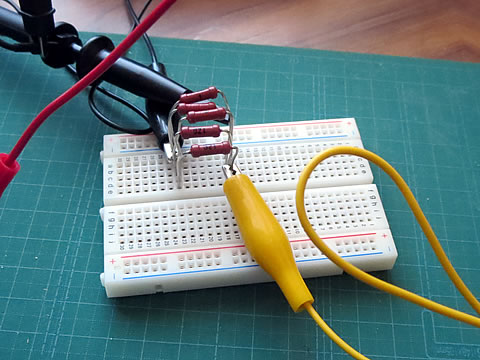
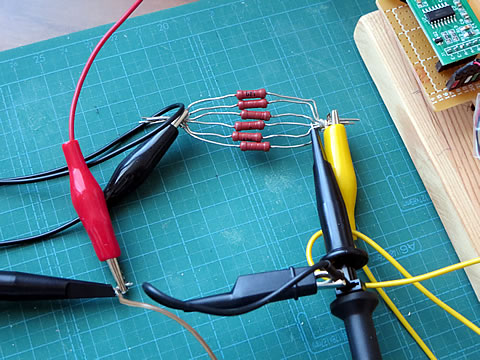
回路を流れる電流値の測定のために、回路にシャント抵抗を挿入した。 線路を模して1Ω程度の抵抗を探した。 比較的大きな電流が流れるので、ワット数の大きな抵抗が必要であるが、持ち合わせていないので 12Ωで1Wの酸化金属皮膜抵抗を5個並列に並べてシャント抵抗を作った。
ありあわせの道具なので下左の写真に示す様に、ブレッドボードに突き刺して並列回路とした。 そして両端の抵抗をテスターで測定した見たら、3.2Ωであった。
少し計算と異なるが、詳しい計測をするのでは無いのでこれで良しとした。
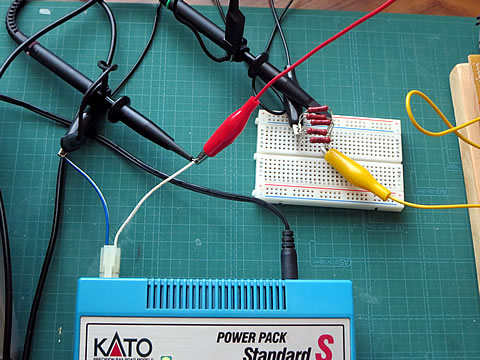
また、回路は太めのクリップ付きリード線で構成しているが、パワーユニットからはKATOの延長線を短く切断してクリップで挟み、プラス側はモータ端子に、マイナス側はシャント抵抗の下流側に接続した。 プラス側とマイナス側には、オシロのプローブを接続してCH1に接続する。 上右の写真。 シャント抵抗の上流側はモータ端子に接続すると共に、オシロのプローブを接続してCH2に入力した。
即ち、オシロのCH1には電圧を、CH2にはシャント抵抗に発生する電圧を入力することになるので、パワーユニットから出力される電圧と流れる電流が測定されるのである。 また、モータは以前紹介したモータ測定用装置を使用し負荷状態を調整できるようにした。 下左の写真。 そしてパワーユニットのダイヤルには4ヶ所の印をつけてダイヤル目盛とした。 下右の写真。


こうして、ダイヤル目盛位置は4ヶ所とし、モータの負荷については、大、小、無負荷回転とし、さらにモータを接続していない状態も含めて4種類として測定した。
■ KATO製パワーパック Standard S の波形
まず、KATO製のパワーパック Standard S の波形を観察した。 その時のオシロ波形を下に示す。 拡大図( PDF形式)
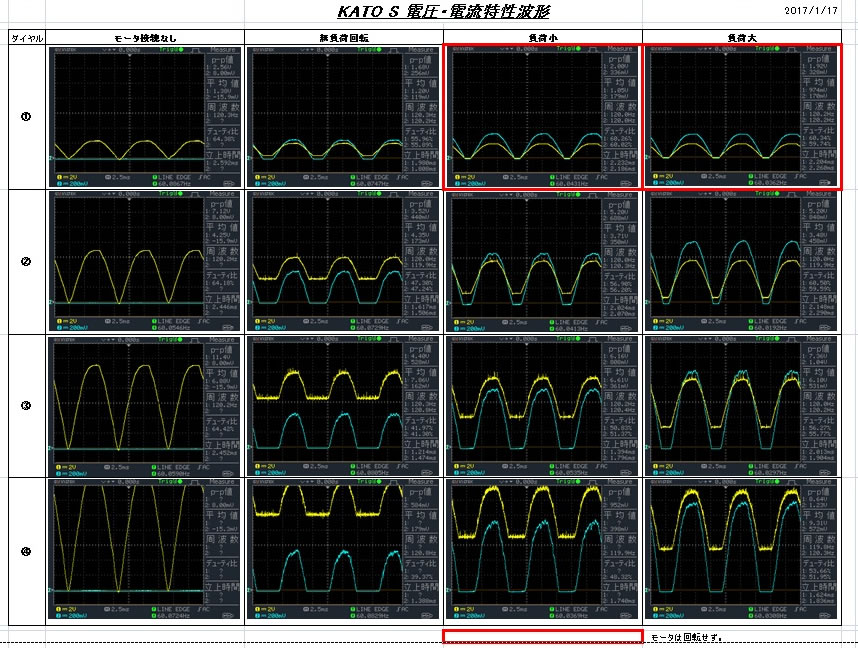
CH1とCH2のゼロ点は下から1番目の目盛線に設定しています。 モータを接続していない場合は、当然電流はゼロでありますが、電圧は全波整流の波形を示しています。 ダイヤルを右に回すとその電圧が高くなって行きます。
これにモータを接続すると電流が流れ始めてモータが回転していきます。 モータの回転トルクよりも負荷が大きい場合はモータは回転出来ずに停止した状態になってしまいますが、この場合は右上の赤線で括った枠内の画面のように、電流は電圧に比例した波形となっているのが分かります。 モータが焼けないうちに負荷を下げて回転させるようにしましょう。
モータが回転している場合は、興味ある波形を示します。 ダイヤル3で無負荷回転時の波形が分かり良いのですが、電流はゼロなのに電圧だけが底上げされているのがわかります。 電流がゼロなのに、電圧が一定でモータが回っている!
ものの本によるとこれが逆起電圧現象だそうです。 そして、負荷が大きくなるとその電圧が下がってくる? 負荷が大きくなるとモータの回転数が落ちてくるので逆起電圧が小さくなると考えれば納得ですね。 電流のピーク値は負荷に合わせて増加しているのも納得ですね。
■ TOMIX製パワーユニット N-1001-CL の波形
次に、TOMIX製パワーユニット N-1001-CL の波形を観察した。 ダイヤル部には目盛らしき印が有るのでこれを頼りに、KATO の場合と同じように位置にて観察した。


その時のオシロ波形を下に示す。 拡大図( PDF形式)
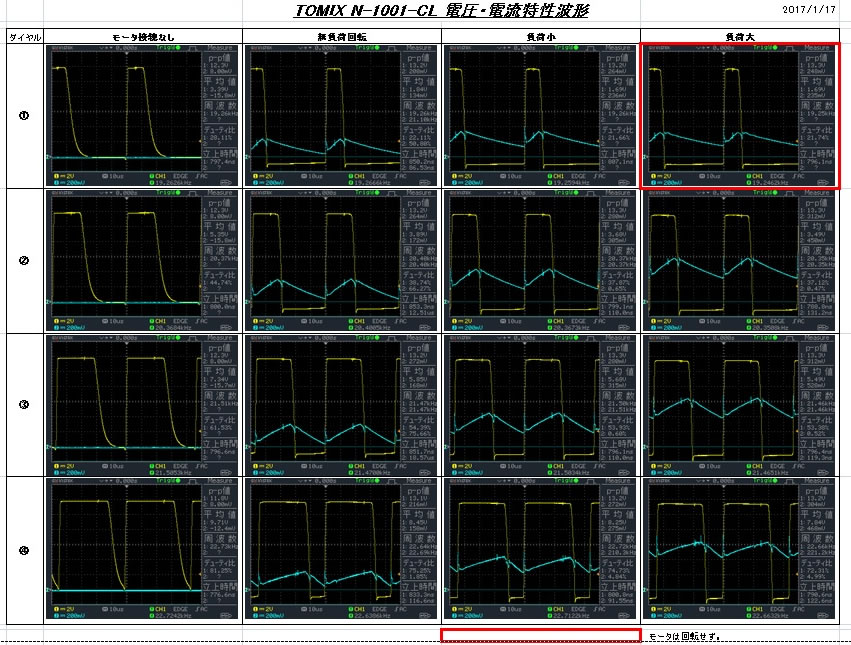
このTOMIX製パワーユニットはPWM制御によってコントロールされているので、波形が全然異なっています。 電圧はパルス波形ですが、電流は三角波になっており、電圧がゼロ( いや、少しマイナスなのである )なのに電流が流れているのはなぜ? 同じモータをつかっているのに! また、電流の増加勾配はパルス幅に応じて変化しているのは何故? モータは同じなのに!
KATO の場合とは、波形のサイクルが大きく異なっていることに注目しておきましょう。 それは、KATO の場合は 120Hz であり、TOMIX の場合は 20Khz と大きく異なっていることです。 モータは強力なコイルをもっているため、急激に変化する反応に対して反応が遅くなるものと思われます。 従って電流の変化はゆっくりと応答するものと考えれば、少しは納得するのですが、モータの逆起電圧現象はどこに行ってしまったのか腑に落ちません。
一方で、ものの本にようると、フライホイール電流と言われる現象で説明されています。 流そうとすると流れにくいが、止めようとしても流れるだとのことで、機械で言うフライホイールと同じ現象で説明されている。 まさにフライホイール電流なのだ。 でも、頭の古いメカ屋の小生には、逆起電力現象とフライホイール現象との違いが理解できていません。
そして、ふと気が付いたのですが、測定中にモータを手で強制的に止めてみたらどうなるだろうか? モータは回転していないので逆起電力現象は発生しないはずでありその時の波形を観察すると、逆起電力現象とフライホイール現象との違いが分かるのではないかと考えて、追加実験を実施してみることにした。
■ TOMIX製パワーユニット N-1001-CL の追加実験
実験の目的は、モータを強制的に止めた時の波形の違いを観察することであるので、上記の実験状態を再構成することにした。 ただ、シャント抵抗は新しく作った。
手持ちの12.6Ωの6本の抵抗をまとめてハンダ付けして、急作りのシャント抵抗とした。 テスターで測定すると 2.5Ωであった。 なお、この抵抗は 「抵抗挿入による特性の改善」にて使用した部品の残りです。
波形観察の結果を下に示す。 拡大図( PDF形式)
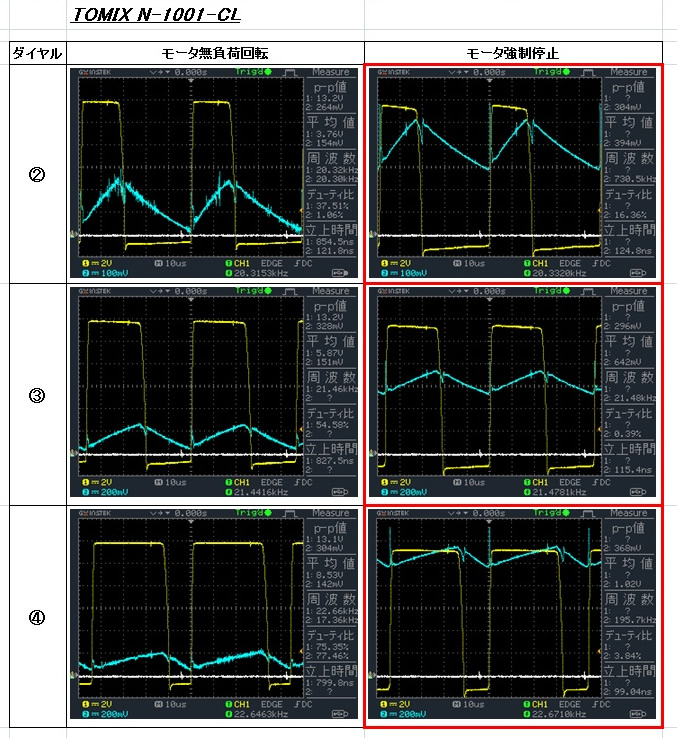
ダイヤル目盛の3と4の場合、スケールオーバーしたため、CH2のゲインを一段階小さくしています。
回転中のモータを手で強制的に止めると、流れている電流が急増しています。 そして、パルス電圧も少しマイナス側に移動する現象も現れいます。 ダイヤル目盛が4の場合でみると、シャント抵抗の平均電圧は、0.14volt から 1.02volt に変化しています。 この増加した電圧分がCH1の電圧を下げていることが分かります。 シャント抵抗より、この時の電流は 56mA から 408mA に増加していることになります。
また、回転中のモータを強制的に停止させると、電流の平均値は大きく増加するも、電流の三角波形は変化しない事が分かります。 これは、回転により発生する逆起電力は電流の平均値を下げるも、三角波形には影響していないと言えるでしょう。
このことは、三角波形は停止しているモータ、即ち、鉄心付きコイルにパルス波を与えた場合に発生する現象であり、コイルに高周波パルスを与えた場合の反応と考え、これをフライホイール現象と言うと勝手に納得することにしました。 この三角波の波の高さ、即ち p-p 値は、ノイズを拾っている場合を除き、大体同じの 300mv であり、電流に換算すると 120mA になります。 そしてパルス幅に関係していないところを見ると、パルスの周波数に関係するのではないかと見ています。
すると、目盛4の場合をさらに進めて、パルスのヂューティ比を100%にした時の電圧と電流の値を知りたくなったので、さらに追加実験を実施しました。
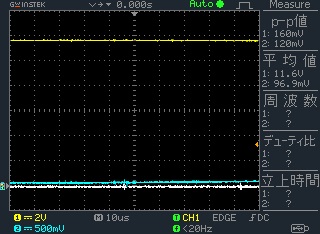
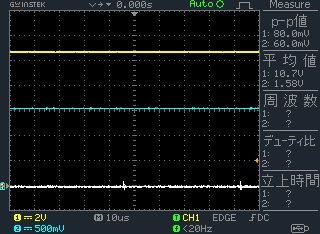
当然ながら三角波はなくなっていました。 これはフライホイール現象が消滅したと考えることが出来ると思います。 しかし、モータが回転している場合には逆起電力が発生して流れる電流と制限していることもはっきりしました。
モータが回転している時の平均電圧はCH1が 11.6V 、CH2が 96.9mV である。 モータの回転を止めた場合には10.7V と 1.58V であった。 シャント抵抗から換算すると電流は39mA と 632mA 流れたいたことになる。
ちなみにジャンク品2の内部抵抗は 12.5Ωであったので、シャント抵抗を加えると15Ωになり、10.7Vの電圧をかけると570 mAの電流が流れても良い事になる。 そして、テスターで回路抵抗を直接測定しみると18.7Ωであった。 数値がピタリと合わないが、大体の値は合ってくるので良しとしよう。
すなわち、モータが回転していない場合には、およそ 600mA の電流が流れるはずであるが、モータが回転することによる逆起電力によって、その流れが阻止されて、およそ100mA 程度しか流れないことになります。 これが逆起電力の作用なのだと納得しました。
一方、フライホイール電流は、これとは独立した現象であり、コイルに高周波パルスを与えた場合の反応で、機械的なフライホイールと同様の現象を電流に与えるものと理解しました。 流れている電流を急激に遮断しようとすると、衝撃的な電圧が発生するのでフライホイールダイオードを挿入して、その電流を流す様にして防止することもやっと理解できました。
● 用語について
フライホイールダイオードに関して実際の回路はどうなっているのだろうかと興味があり、以前使用したことのあるモータ用ドライバICの説明書(仕様書)を開いてみたが、その記述には、「逆起電力吸収用ダイオードも内蔵」と書いてありました。 このIC は東芝製の TA8428K であり、一流メーカーの東芝さんの記述ですので信用できるのですが・・・・・・・・・。 この説明書は以前も読んでいたので、小生の頭には「逆起電力」という言葉がインプットされていたのではないか、それが混乱の原因だったのではないかと考える様になりました。
2種類の逆起電力が有るなんて思いもよらないので混乱していたようですが、元をただせばフレミングの何とかの法則に由来する現象と思うので、逆起電力という表現も間違いでは無いかと思いますが、素人には混乱の原因です。 ちなみに、先回の3極モータの件と同様に、赤津先生の本を開いてみました。
すると、フライホイールダイオードのことを、フリーホイールダイオード、還流ダイオード、帰還ダイオードと呼ぶとの説明でした。 これまた色々ありますね。 この分野は古い歴史がありますので、色々な用語が使われているようですが、自分は赤津先生の用語に統一して行こうと思います。
■ まとめ
今回の実験により、パワーユニットの制御方式の違いによる電圧と電流の関係を理解することが出来ました。 さらに、2種類の逆起電力、即ちモータの発電作用によりモータのマイナス側からプラス側に電気を流そうとする働く現象と、鉄心付きコイルに流れる電力を回路が遮断されても電流を流そうとするプラス側からマイナス側に働く現象の違いを理解出来ました。 このために、その結果がデータとしてどう表れるかも理解できるようになりました。 勉強になりましたね。
そして、PWM制御方式のパワーユニットとコアレスモータの関係や、ドクターカー実験の場合の電圧降下現象を調査する意欲が沸いてきましたので、いよいよチャレンジすることにしましょう。
2017/1/19 作成