
HOME >> 鉄道模型実験室 > モータドライバTB6643KQのPWM波形を観察する (その1)
鉄道模型実験室 No.153 モータドライバTB6643KQのPWM波形を観察する (その1)
 .
.
先回、Arduino Nano Every で出力されたおよそ16KHz のPWM 出力に対して、Bトレの動力車が反応しないトラブルに遭遇した。
その時に線路に供給されていた給電電圧の波形は、右のような波形であった。 この状態ではBトレは動いていないのである。 波形をみていると、PWM のOFF 時の挙動がおかしい事に気が付いた。 供給電圧がマイナスに振れているのである。 自分の常識ではゼロの状態と考えていたのだが、モータのフリーホイール電流の影響によって、この様な状態になるのではと想定し、簡単な実験装置を組んで波形を観察することにした。
■ PWM波形の観察実験
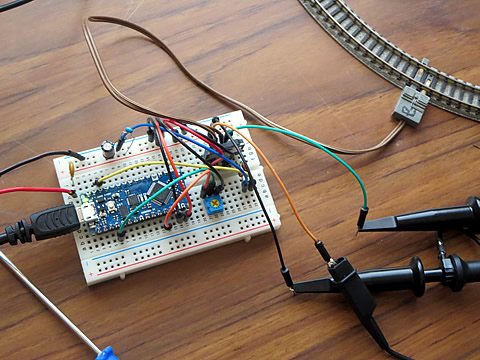
下の写真に示すように、机の上にArduino およびモータドライバをブレッドボードの上に組立て、簡単な線路に給電させた。 この時の給電端子の電圧をオシロで観察することにした。 回路は、半固定抵抗で分圧した電圧をアナログ端子に入力してデューティ比を制御するようにしています。
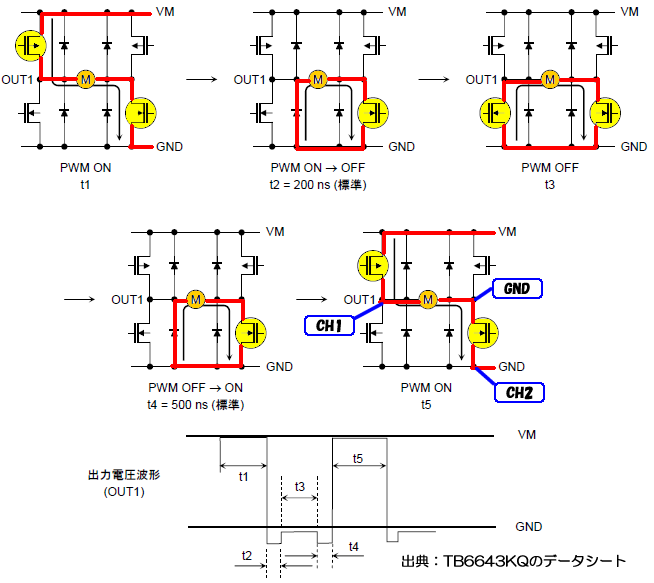
モータドライバの機能を理解するため、使用していた東芝製モータドライバ TB6643KQ データシートを改めて見直した。 ブリッジ構成された回路図での電流の流れが説明されている下記のページを見ていて、パルスをOFF後の説明が記されているが、何やら難しい制御が実施されている様でした。
 .
.
その機能は良く理解できないので、取りあえず、図に示したポイントでの波形を観察することにしました。 オシロのCH1 は、モータと接続されるOUT1とOUT2の間の電圧波形を見るために、オシロのGND端子をOUT2 に接続しています。 さらに、OUT2とGND 間の電圧を見るために CH 2 を使用しましたが、オシロのGND は一ヶ所なので、図のように接続しました。 オシロの高等な操作では、CH1とCH2 の差分を表示されるテクニックがあるのではと想定しましたが、不明であったためこの様に接続しました。 即ち、CH2 はプラス・マイナスが逆に表示されます。
走行させる電車類は右のように、R140mmのカーブを走行できる動力車を集めて走らせることにします。
また、Arduino Nano Every には、先回使用したテスト用のスケッチを書き込みました、
■ オシロでの観察結果
まず、問題のBトレ動力車から走らせていました。
| Bトレ 動かず | Bトレ 動き出す |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 = 15.7 KHz |
やはり、なかなか動きませんでした、デューティ比をあげるとやっと脱兎のごとく走り出しました。
| 時間を拡大して表示 | 速度を落とす |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
線路には、CH1の黄色の線に示す電圧が掛かっていますが、パルスがOFF後はマイナスの電圧が掛かっている事が分かります。 そして、その分だけ反対側がプラスになっている事が分かります。 パルスON時にもらった電力が、パルスOFF時には否定されと解釈し、プラス分が打ち勝った時点でモータはやっと動き出すと考えると屁理屈が立ちます。 このマイナスの特性は、パルスの周波数には関係なくモータの特性と考えられます。
そこで、コアレスモータ搭載車を走らせてみました。
| コアレスモータ車 走行中 | コアレスモータ車 停止 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
パルスがOFF後の波形は、瞬間的には落ち込んでいますが、すぐにある一定の値に上昇しています。 この値は、スピードによって変化していましたのでモータの逆起電圧を示しているものと考えています。 モータが発電機になっているのですね。
このパルスがOFF後の波形を拡大して比較してみましょう。
| コアレスモータ車 | Bトレ車 |
|---|---|
 |
 |
周波数 =15.7 KHz |
周波数 =15.7 KHz |
鉄心のあるBトレのモータは、パルスを瞬間的にOFFしても、今まで流れていた電流が流れ続けようとするフリーホール電流が大きいとのことですので、その影響が表れていると解釈します。
● PWM 周波数を落としてみる
そこで、PWM 周波数を約1KHz に戻してみました。
| Bトレ車 走行中 | コアレスモータ車 走行中 |
|---|---|
 |
 |
周波数 =982 Hz |
周波数 =982 Hz |
他の車両を幾つか走らせてみました。
| KATOのC12車 走行中 | 鉄コレ12m級電車 走行中 |
|---|---|
 |
 |
周波数 =982 Hz |
周波数 =982 Hz |
| ワイドトラム 走行中 | 電車を乗せていない時 |
|---|---|
 |
 |
周波数 =982 Hz |
周波数 =982 Hz |
周波数を1/16に落とすと、パルスOFF後の挙動の影響が少なくなり、全体的にバランスがとれた電力供給となっている。 このため、色々なモータに対して問題無く走行させている事が分かる。 モータの逆起電力の明確に現れいる。
また、最後に示したレールの上に電車を乗せていない時は、OFF後の不思議な挙動ではなくて長いスロープになっているのは、供給された電力がゆっくりと放電されていくのものと理解した。 Hブリッジの橋が無い状態なのである。
■ まとめ
このドライバのPWM波形は、自分が想定していたものとはずいぶん様子が異なっていることが分かった。 しかし、〜100kHzまで対応するとデータシートに説明されているいるので、使い方に何かノウハウがあるのではないかと考え、素人ながらいろいろ考えてみよう。
2020/3/5 作成