
鉄道模型実験室 自動運転制御のテスト
.
■ はじめに
先回、新しい測定方法を検討したが、最終的にはNo.14 の自動制御運転を取り入れた「 小判型+8字パターン」に落ち着いた。 その後、この方法での実現に向けて試行錯誤を続けてきたが、やっとその目途を付けることが出来たので、その結果を報告することにする。
まず今回は、目途を付けた状態を最初に紹介しておこう。
.
.
■ 自動運転の目的
はじめに、この自動運転の目的を整理しておこう。
この自動運転の目的は、測定しようとしている動力車のモータ回転数やモータ端子電圧など、走行している車両の測定データを、有線を使ってパソコンにリアルタイムに取り込もうとするものである。 測定台の線路を旋回する車両と、固定基地を有線で接続している場合、有線がどんどん捻じれて行ってしまう。 そこで線路を8字走行させると、旋回方向を右に左に変えながら走行するので、有線の捻じれを防止することができる。
しかし、測定台の上に8字走行のパターンを設置しようとすると、測定台の長さが3m にもなってしまい、実現不可能と思われた。 そしてたどりついた結論が、「小判型+8字パターン」であった。 しかし、その条件として、4個のポイント操作と2ヶ所の給電ポイントの極性操作を制御して、周回路の進行方向の逆転とリバース走行の自動運転が必要となったったのである。
■ 小判型+8字パターンでの自動運転制御のテスト走行
システムの実験のために、半径140mm の線路を使用してミニレイアウトを組み、システムの作動テストを実施した。 その結果を下に示す。
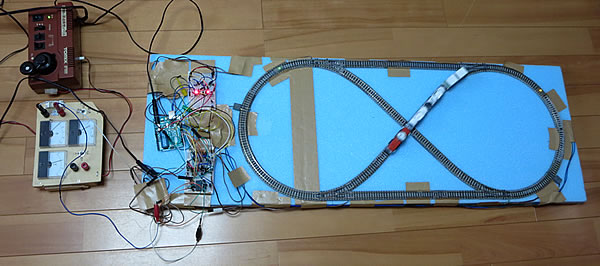

レイアウトはストック品の 30mm 厚さのスタイロンを使用し、ガムテープで線路を張り付けている。 また、制御回路はブレッドボードを使って構成しているが、制御は充分に機能していることが確認できた。
■ テスト用のレイアウト
テスト用のレイアウトを下に示す。
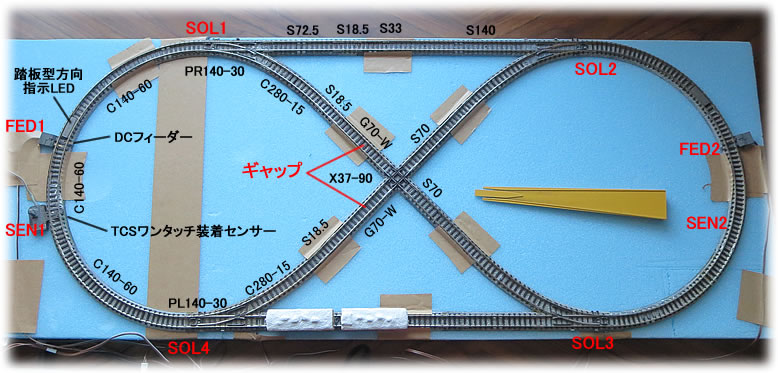
先回報告したレイアウト図からは、ギャップの位置を変更している。 測定位置でのギャップ設定は、もしかして電圧変化やノイズなどの発生を誘引するのでは無いかとの不安が有って変更したのである。 さらに、このリバース線上にギャップを設けると、SOL1とSOL3、およびSOL2とSOL4の対となっているポイントを二つ同時に作動させても、右と左の供給電源の極性が独立することになり、極性が異なっていてもショートしない事に気がついてのである。 これは、二つのポイントを一つの操作で同時に切り替えることが可能になったことを示唆している。
レイアウトは、ストック品として多く保管しているTOMIX 製の線路を使用して構成した。 まず8字パターンを作るために、C140-60の曲線路と、PR140-30およびPL140-30のポイント、および、X37-90の十字クロスを選定してパターンを作った。 この時、15°カーブの線路が必要となるが、C140やC177系では設定されていないので、手持ちのC280-15を使用した。 そして、8字を結ぶ直線部分は端数線路を組み合わせて接続した。
供給電源の極性を表示させるため、踏板型の方向指示LEDを使用したが、性能測定時には、わずかとはいえ動力車以外に電流を消費するので取り去るものとする。 システムの動作確認用としてのみ使用する。 同様な意味で、TCSセンサーも消費電流を検証しておく必要がある。
■ 自動運転のシーケンス
テスト用のレイアウトが出来たので自走運転のシーケンスを考えておこう。
| ステージ | 状態 | センシング | アクション | 説明 |
|---|---|---|---|---|
| 0 | 初期設定 | SOL1〜SOL4 直進状態、FED1&2 を右回り設定 | ||
| 1 | 右旋回中 | SEN2 ON | 右回り旋回中の確認 | |
| 2 | リバース準備 | SEN1 ON | SOL1&SOL3 分岐後、FED2 を左回り設定 | |
| 3 | リバース完了 | SEN2 ON | FED1 を左回り設定後、SOL1&SOL3を直進に | 左回り旋回開始 |
| 4 | 左旋回中 | SEN1 ON | 左回り旋回中の確認 | |
| 5 | リバース準備 | SEN2 ON | SOL2&SOL4 分岐後、FED1 を右回り設定 | |
| 6 | リバース完了 | SEN1 ON | FED2 を右回り設定後、SOL2&SOL4を直進に | 右回り旋回開始 |
| ⇒ ステージ1 に戻る | ||||
ステージ1と4は、旋回路を必ず一周して来たことを確認するために挿入したチェックポイントであるが、センサの複数打点防止にもなっている事に気が付いた。 通過する複数の車輪で何度も信号が発信されても、有効な最初の信号だけを読み取っていることになるのである。
次回は、システムを構成するセンサーなどの要素と、処理回路、制御ソフトなどの検討結果を順次報告して行こう。