
HOME >> 鉄道模型実験室 > SLのモータ回転数を測定しよう その3 リモコン受光モジュールの取り換え
鉄道模型実験室 SLのモータ回転数を測定しよう その3 リモコン受光モジュールの取り換え
■ はじめに
注文していたローム製のリモコン受光モジュール RPM6938 を入手したので組付けを実施した。 何度も部品を交換していたので、サテライト・ユニットの基板はガタガタになってしまったが、機能優先として見栄えには目をつむることにした。
 .
.
また、測定車ユニットの回転数センサは、出力不足であったので、増幅回路も追加工が必要であった。 今回はその工作も実施し、機能確認のベンチテストを実施する。 今度は自信をもって実験が出来そうである。
■ 回転数センサの増幅回路
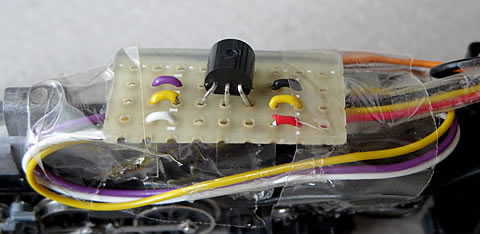
先回のブレッドボードでの実験では、トランジスタは手持ちの(これしか持っていない) 2SC1815 を使用し、ベース側に1KΩ、エミッタ側に3.3KΩを接続し、プルダウン回路を形成した。 そして信号を取り出した結果は、充分な機能を確認出来た。 今回は、抵抗をチップ化してさらに小型化することにしたが、1KΩ と 3.3KΩの仕様のチップ抵抗を持っていなかったので、代わりに 560Ω と 5.1KΩの抵抗を使用する事にした。
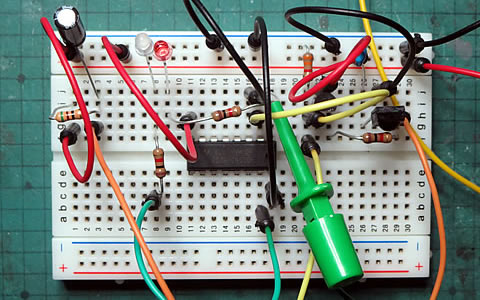
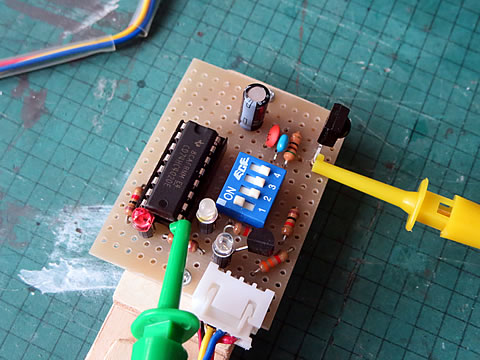
基板は薄手のものを使い、 トランジスタの裏側の配線上に二つのチップ抵抗を取り付けた。 C58-127号機への取り付けは、回転センサボードの上に重ねて取り付けている。 相変わらずセロテープでグルグル巻きの状態である。 下の写真。
■ リモコン受光モジュールの取り換えとベンチテストの実施
注文していたローム製のリモコン受光モジュール RPM6938 を入手したので組付けを実施した。 サテライト・ユニットの基板は何度も部品を交換していたので、ガタガタの状態になってしまったが、機能優先として見栄えには目をつむることにした。 ハンダ付け状態はぐしゃぐしゃで、基板のホール部分のメッキがあちこちはがれたしまったが、表からみると綺麗なままである。 下左の写真。 0.1μFのコンデンサはパスコンとして取り付けたままにしている。
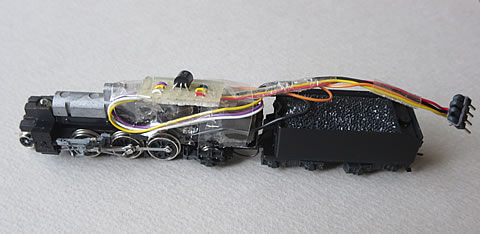
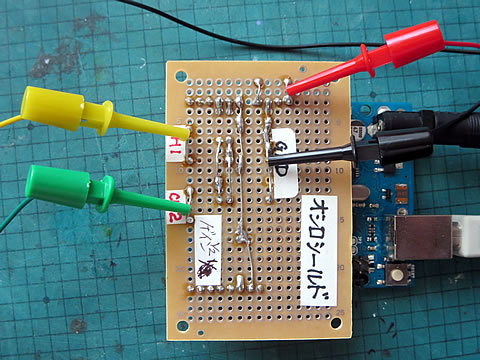
次に、モータ回転数センサの機能と、赤外線通信の送受信の状態を確認するために、下右の写真のように配線を実施した。 実験方法は先回と同じである。

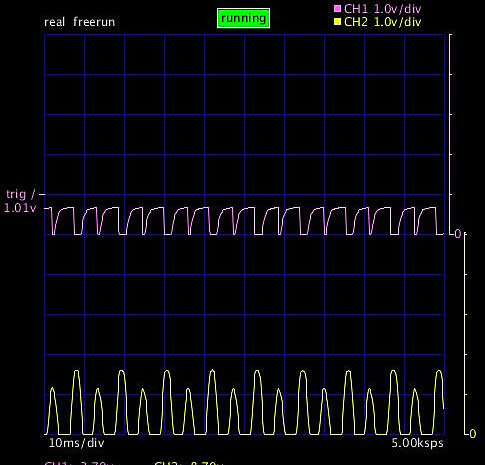
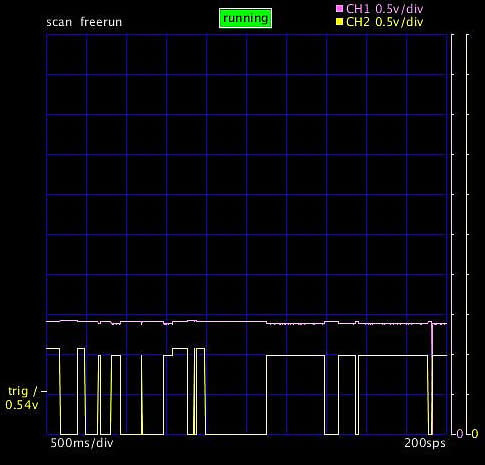
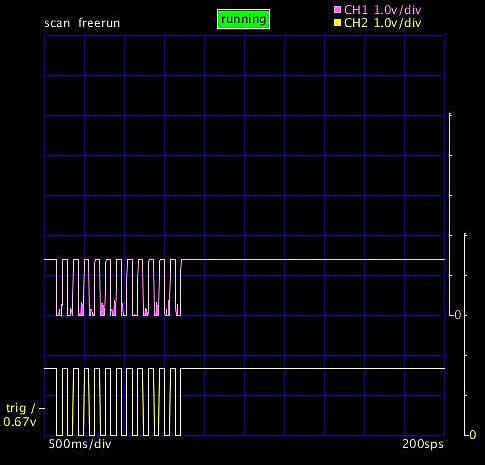
C58-127号機を使用し、そのモータ駆動は測定車ユニットのモータ端子電圧の測定端子から給電する。 電源は安定化電源を使用して回転数を調整する。 オシロには、カウンタのQ1'出力をCH1 に、回転数センサの出力電圧をCH2 に接続して、パルスの発生状態を観察した。 下左の画面。 また、下右の画面は受光モジュールの出力端子をCH1 に接続した状態である。
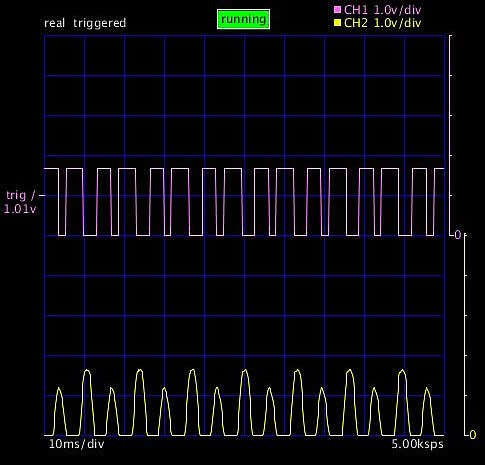
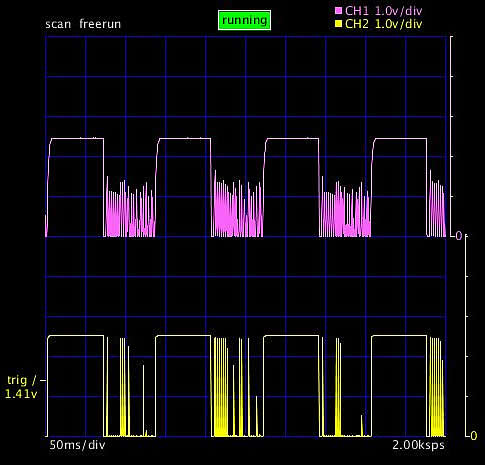
CH2 に示された回転数センサの出力電圧は、高い山が 1.7volt、低い山が 1.2volt で充分な出力を得る事が出来ている。 また、信号の山に高低があるが、回転部分に塗布したペンキの幅や状態が表れているものと推定している。 そして発信されたパルスは、幅の違いがあるものの確実に信号を受け取っている事が判る。
ちなみに測定車の赤外線LED用の信号線をCH1に接続した状態を観察したのが下左の画面である。 さらに、モータ電圧を7ボルト近くまで上げて回転数を上げた状態を下右に示す。
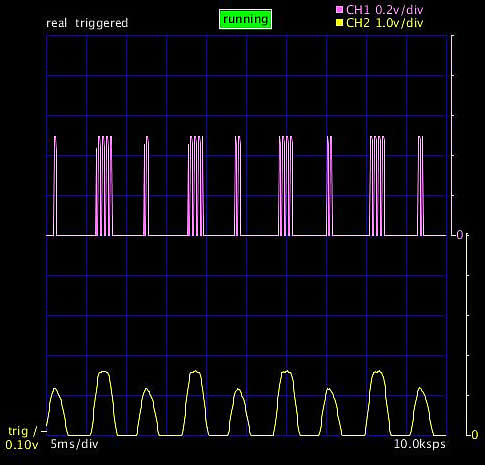
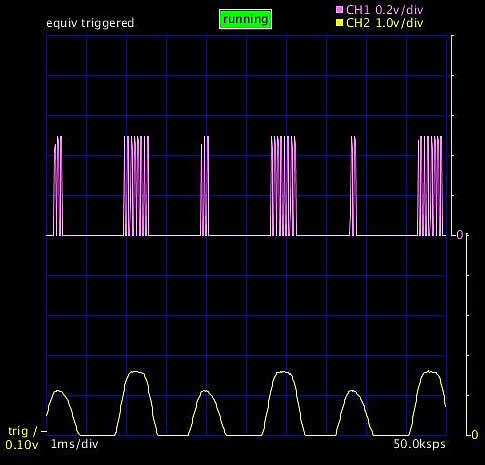
発信側のパルスも、キャリヤ波を重畳している状態が確認できる。 やはり、回転数センサの出力電圧が低い山の場合はパルス幅が短くなっているが、パルスが発信されているのでOKとしよう。 パルスのカウントには、パルスの長短は関係しないと判断している。
■ ノイズ状態の確認
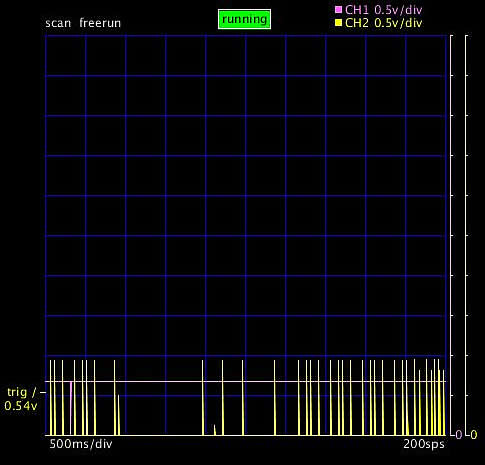
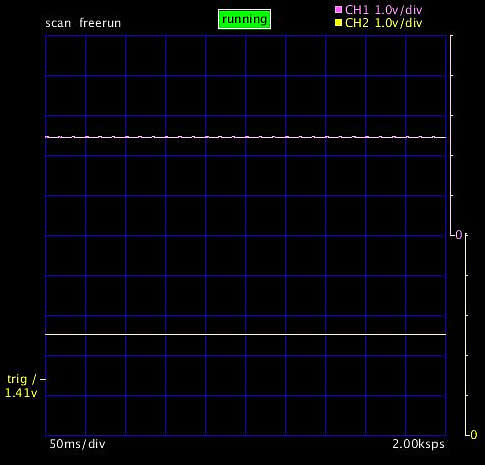
次に、測定車ユニットの電源を切り、モータ駆動用電源もOFFにした状態でカウンタのQ1'出力をCH1 にセットして様子を見た。
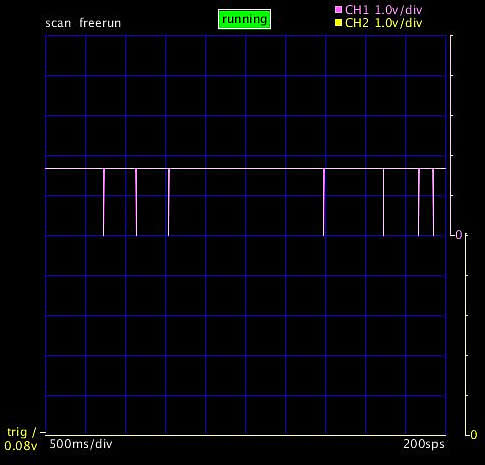
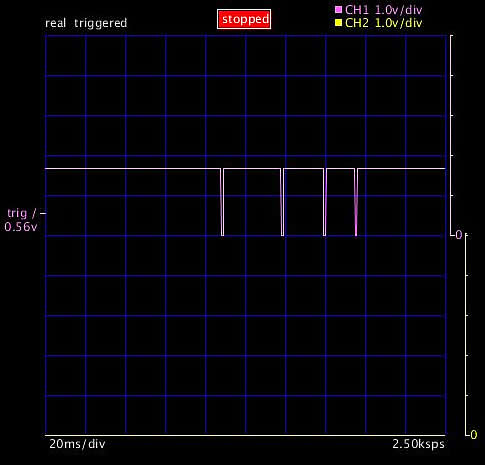
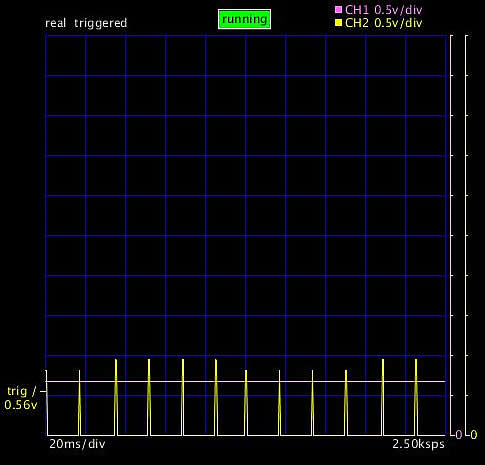
何もしないのにカウンタのLEDは点灯したり消灯したりしている。 これはオシロの画面にも示されているように、回路のどこかでノイズを勝手に拾い、カウンターのカウントを進めていると判断した。 上左の画面は 500ms/div のゆっくりしたスイープで、上右の画面は 20ms/div の短時間のスイープ画面である。 トリガを設定して偶然キャッチした波形であるが、ノイズのパルス幅は狭い事が判る。
このノイズは赤外線のノイズを拾っているのか、あるいはセンサ自身が発しているノイズなのかを区別するため、サテライト・ユニットの電源をArduino から安定化電源にかえて観察してみた。 すると、オシロ画面もサテライト・ユニットのLEDもダンマリの状態であった。
******** オシロ画面のスクリーンコピーを忘れてしまった。 *********
暫く見ていても、ダンマリ状態がそのまま続いていたので、リモコンを持ち出して応答をみると確実に反応してくれた。 システムは正常に作動している事が確認できたし、電源の違いによりノイズの発生は左右されると判断されるので、Arduino の電源に原因があることが判った。
 .
.
■ ブレッドボードでの実験
ノイズはArduino の電源が関係していることが推定できたので、黙って見過ごすことはない。 なんとかその対策が出来ないか検討してみる事にした。 このため、ブレッドボード上で回路を組立て実験した。
ノイズ発生源としてリモコン受光モジュールなのか、あるいはカウンタなのかもチェックする必要があるので、リモコン受光モジュールからの信号とカウンタの信号を同時に観察する必要があった。
今までは、受光モジュールの出力端子にオシロ端子を接続するとカウンタが停止してしまう状態であったので、受光モジュールの信号を増幅させて、カウンタと接続させてみる事にした。
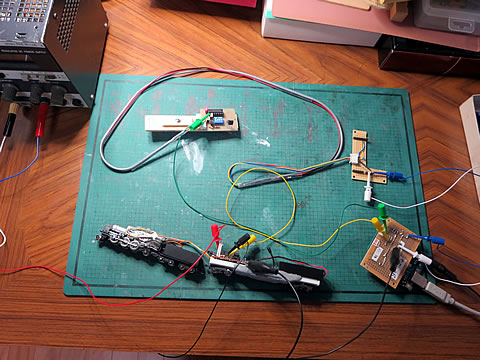
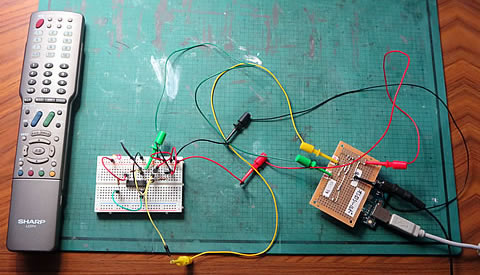
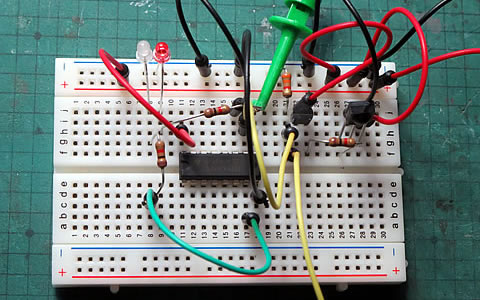
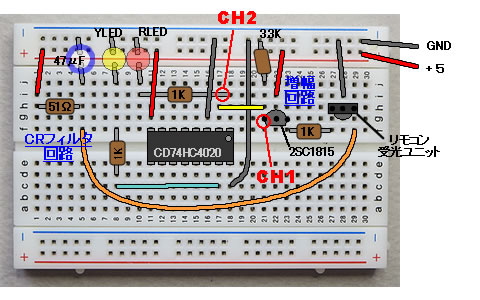
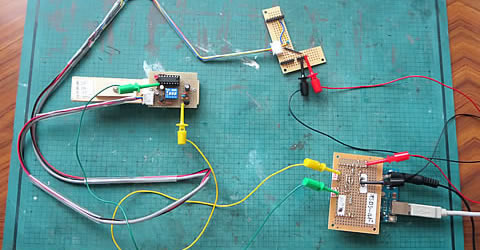
その時の実験状態を右の写真に示し、ブレッドボードの写真と回路を下に示すが、今回は回路の代わりに実体配線を表すイラストを作ってみた。
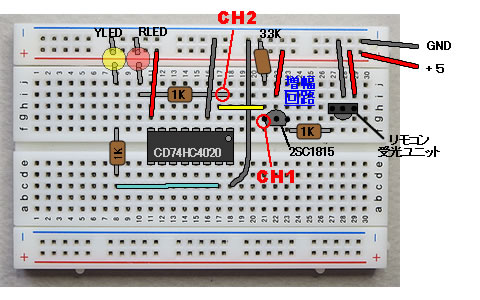
まず、リモコンの赤外線を当てて受光モジュールの反応を確認したのが下左の画面である。 CH1とCH2の接続点は右上のイラストに示す。 オシロシールドの分圧回路により、電圧は1/3になっているが、回路は正常に機能していることが判る。
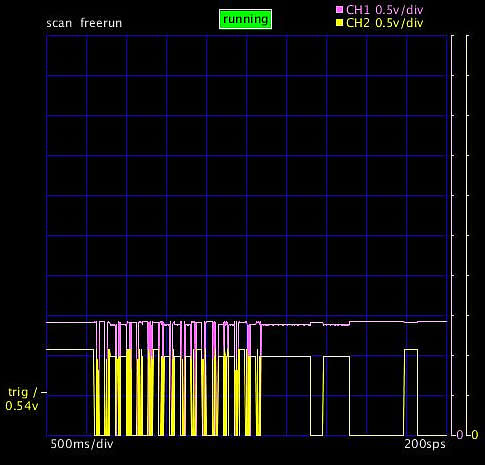
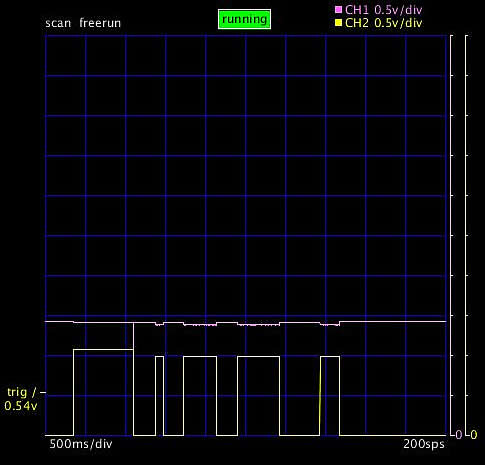
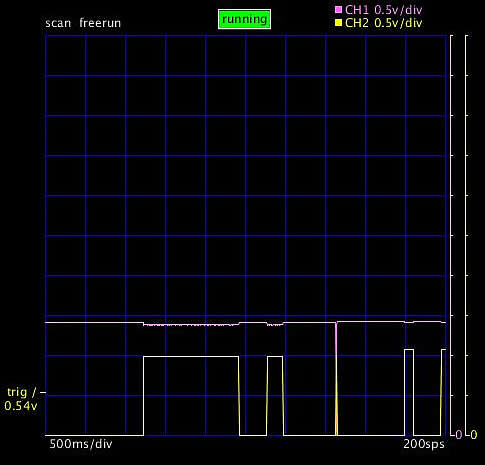
右上と下の左右の画面は、何もしていない状態のオシロ画面である。 ランダムにノイズが発生状態を観察することが出来た。
CH1とCH2は同期しているように思われるが、CH1の電圧変化量が小さいのに、CH2は確実に反応している。 CH1の電圧値は、3目盛× 0.5v/div ×3 = 4.5 ボルトと計算されるが、その電圧変化量が小さい理由が良くわからない? 自分には充分に理解できていない。
しかし、CH1のノイズは、小さな変化のものと鋭く深い変化の2種類がある事が観察されるし、これらのノイズはランダムに発生しているようである。
ここで少しお遊びを実施する。 カウンタへの入力線と受光モジュールの出力線を取り外して、観察したのが下の画面である。
右の画面はスイープ時間を短くして表示させている。 カウンターの入力が無い状態なのにカウントは実施している。 しかも規則正しく! CH2の間隔を計算すると丁度 60サイクル/sになる。 何の事はない、家庭用電源ではないか! ACアダプターから電源を供給されているArduino 電源が影響していると推定いする。
ここで、カウンターの入力端子をGNDと接続すると、上記の波形はピタリと消えてしまった。 電子回路のICに於いて、使用しない端子があればGND等に接続しておけと言うアドバイスを再確認した。
カウンターの入力端子をGNDに接続するとノイズはピタリと止まり、受光モジュールに接続するとノイズは現れる。 このことより受光モジュールに注目する事にした。
■ ノイズ対策
ノイズ対策の知識がゼロに等しいので、先回の実験でも記述したように、SHARP 製のカタログに記載されていたCRフィルターを実装すると良いとの記述をもとに、最初に実験してみる事にした。 47μFのコンデンサと51 Ωの抵抗を使ったCRフィルター回路をブレッドボードに実装し、受光ユニットのVcc端子に接続した。
 .
.
この時のオシロ画面を右に示す。 CH1とCH2 は全く静かであったので、リモコンで送信してみたところ、リモコンには確実に反応していることが判った。
ノイズ対策と意気込んでいたが、調子抜けしてしまった。 カタログの記載は正しかったのである。 早速この対策を採用するとこにしよう。
■ オシロシールドの問題
オシロシールドの測定端子をリモコン受光モジュールの出力端子に接続すると、カウンターの作動が止まってしまって、受光モジュールの出力状態とカウンタの作動状態を同時に観察出来なかった。 この諦めていた現象の原因に気が付き、対策を実施した。
 .
.
この受光モジュールの説明書によると、内部回路の出力段は、22KΩのプルアップ抵抗が接続されている。 この出力回路にオシロシールドの端子を接続すると、上の様な回路状態になる。 ここで、受光モジュールのトランジスタがONになると、(1)の部分はGNDに接続された状態となり、殆どゼロになる。 しかし、トランジスタがOFF になるとGNDへの回路は遮断されて、 22KΩのプルアップ抵抗を通して+5 ボルトの電圧が供給される。 この時、カウンタのクロックパルス端子CLK への入力端子に接続された(1)の部分の電圧を計算してみると、
5×( 10K + 5k )/( 22K + 10K + 5k ) = 2.03 ボルト
となる。 カウンタのクロックパルス端子CLK の入力電圧は、HIGT > 3.15、 LOW < 1.35 (Vcc = 4.5 の時)との記述があるので、この電圧ではHIGTレベルに達しないことが判る。 このため、カウンタはダンマリ状態になってしまうことが理解できた。
対策もすぐに理解出来た。 オシロシールドの分圧回路の抵抗をプルアップ抵抗よりもずーと大きくすれば、流れる電流は小さくなり、(1)の部分の電圧降下も小さくなるのである。 これが、所謂 “ ハイ・インピーダンス接続 ”と言われていることかなと、自分なりに理解した。 そこで、10KΩと 5kΩの抵抗をそれぞれ 1MΩに取り換える事にした。 分圧ゲインは1/2となる。 その後、WEBサイトを色々見ている時に、このインピーダンス接続を説明されているサイトがあり、A/D変換回路では小さいながらもコンデンサを使用しているので、その電荷の吸い出しも必要なため、あまり大きな抵抗は障害になるとの解説があった。 奨励する数値は100KΩとの事であったが、修正工作は実施済みであったので、 1MΩのままで実験することにした。
 .
.
■ 確認実験
サテライト・ユニットに47μFのコンデンサと51 Ωの抵抗を使ったCRフィルター回路を実装し、オシロシールドもハイ・インピーダンス回路に変更した状態で確認実験を実施した。
実験状態を右の写真に示す。 サテライト・ユニットの状態を下左の写真に示し、オシロシールドの状態を下右に示す。
実際の測定状態と同じ様に、サテライト・ユニットの電源は、Aruduinoの+5 端子から供給し、受光モジュールの出力端子をCH1に、カウンターのQ1'出力を CH2 に接続して、作動状態を観察した。
オシロシールドへの接続は、ゲインが 1:1となる端子に接続したが、出力がピタリと5ボルトの上限にあったので、1:2 となる端子に変更した。
左下のオシロ画面は、何もしない状態の時であり、下右の画面はリモコンを操作した時の状態である。
何もしない時は、いtまでたってもノイズは現れず、ノイズ対策が充分機能していることが確認出来た。 ノイズ対策は大成功である。
■ まとめ
やっとこれで、当初の目的である “ SLのモータ回転数を測定しよう ” の実験に取り掛かる事ができるようになった。 思わぬミスにより、大きく回り道をしてしまったが、そのかわりに多くの知見を得る事が出来た。 電子回路って面白いね と、実感し、奥が深い事も知ったのである。