
HOME >> 鉄道模型実験室 > TOMIXの自動運転ユニットNを調べる その3
鉄道模型実験室 No.146 TOMIXの自動運転ユニットNを調べる その3
 .
.
■ はじめに
ラズパイを使用した自動運転システムの開発を進めてきたが、今だに完成したとは言い切れていない状態である。 そこでTOMIX 製のTCS自動運転ユニットN (品番: 5563)から、何か参考にする事項はないだろうかと、その特性を調べる事にした。 その調査の第3弾は、オシロスコープを使ってフィーダー回路の出力波形を調べてみた。
当初は、別室のブログ「鉄道模型工作実験室」にて「TOMIXの自動運転ユニットの波形調査」として概要を報告したが、様子が理解出来なかったので、別モードで再実験をしたものである。
■ 実験方法
TOMIX 製のTCS自動運転ユニットN (品番: 5563)を使って簡単なレイアウトを組んで見た。 右の写真。
ポイントを使わず、進行方向の変更のない簡単なレイアウトとして、運転モード6のエンドレス駅停車モードを選択した。 さらに、速度の変化状況がゆっくりとなるように、その区間が長くなるよう直線部を長く取っている。
電源供給用のパワーユニットとして、PWM制御のN-1001-CL と 通常制御のN-400 を使用した。 走行させた車両は鉄コレのED-40形で TM-ED01動力を搭載している。
■ 波形の観察
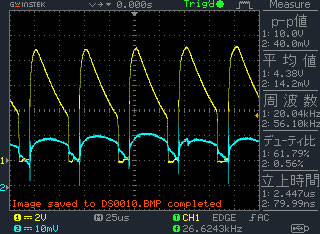
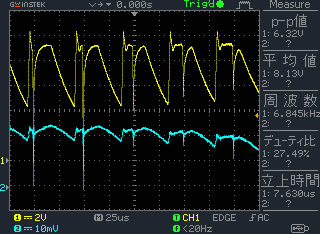
フィーダー線にて観察した電圧と電流の波形を示す。 まず、N-400 での低速走行時の波形である。
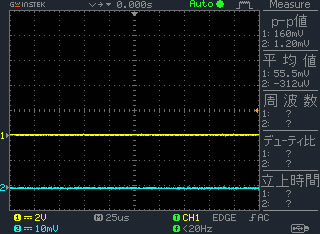
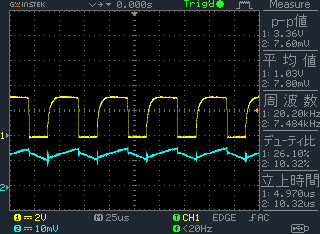
左の画面から停止時、加速中、定速走行時の波形である。 CH1 が電圧で、CH2 が電流である。
N-400 は通常制御であるので、速度設定は電圧値の大小で実施しているが、加減速の制御は自動運転ユニッが 20KHz のPWM 制御をその上に乗せて実現させていることが分かる。 その時の波形は、電圧・電流共に、以前に報告したPWM制御時の波形と同じパターンを示している。
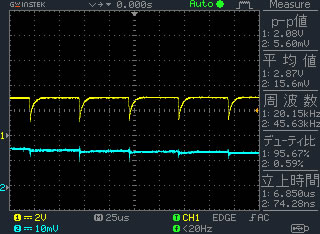
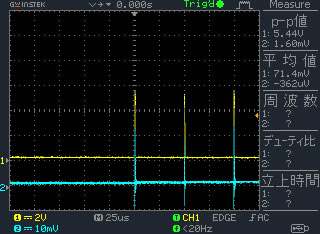
定速走行になるとデューティー比が約 100% になり、電圧・電流共に殆ど一直線状態である。 次に高速走行時に波形を示す。
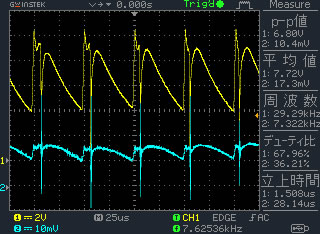
パワーユニットのダイヤルを回して高速走行に設定すると、ピークの電圧値は上昇しているが、波形の形が違ってきている。 後から考えるとこの波形の違いに注目してもっといろいろ調べれば良かったのにと反省するが、わざわ再実験する意欲も無いのである。
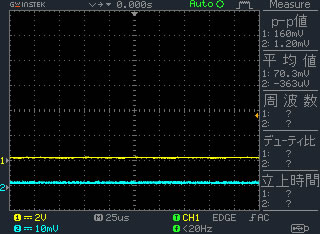
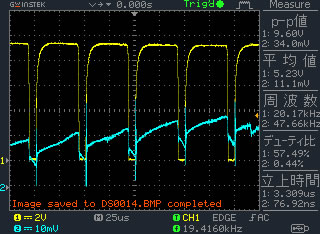
次に、PWM制御方式のN-1001-CL を使って実験した。 まず、低速走行時の波形である。
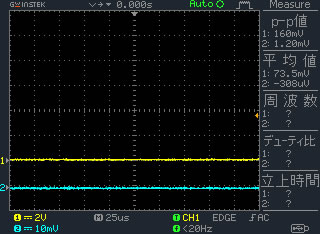
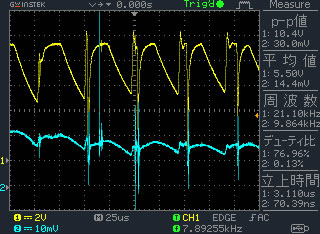
何やらゴチャゴチャした波形である。 次の高速走行時の波形である。
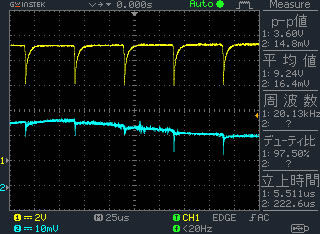
こちらは綺麗なPWM制御波形である。
■ 考察と反省
気が付いた事を順不同に述べてみよう。
- 自動運転ユニットの加減速制御は、パワーユニットからの電力にPWM制御を付与して制御している。
- 加減速制御のPWM制御は、バイポーラ形リニア制御のモータドライバ TA7291P で実施しているが、20KHzが綺麗に出ている! 応答しているのだ。
- パワーユニットのPWM制御と自動運転ユニットの加減速PWM制御の重畳波形はどうなるのか興味があったが、どうなっているのか判別できなかった。
- そして、二つのPWM制御の制御周波数はどうやって同期させているのも、かいもく不明である。
ブログでも記述したように、8月25日に投稿した記事に中で、オシロ画面の動画を紹介した。 納得できなかったので今回、再測定しのであるが、オシロスコープの設定が間違っていることに気が付いた。
画面表示モードには、直流結合モードと交流結合モードがあり、直流結合モードは直流と交流成分を含めた信号全体を表示し、交流結合モードの場合は交流成分だけ表示するのである。 そして、今回のようなデューティー比が変化するPWM制御の場合、平均電圧はデューティー比によって変化する。 このため交流成分だけを表示させると、その中央値が変化して動画の様に移動するのである。 実験中のこのことに気が付いて、今回は直流結合モードにして観察した。
オシロの取り扱いが不十分なド素人の報告をお詫びいたします。
■ まとめ
今回の自動運転ユニットの調査では、残念ながら自分の自動運転システムに対する改善アイディアを得られなかった。 ただし、ポイント駆動回路のコンデンサ容量に関しては、自信をもって進めることが出来るであろう。 また、オシロの取り扱い方も一つ勉強した。
しかし、いつかは参考になる事もあるだろうと考えて、これでこの調査を終了とする。
2017/8/28 作成