
HOME >> 鉄道模型実験室 > SLのモータ回転数を測定しよう その4 またも・・・・
鉄道模型実験室 SLのモータ回転数を測定しよう その4 またも・・・・
■ はじめに
先回までの対策で、やっとこれで当初の目的である “ SLのモータ回転数を測定しよう ” の実験に取り掛かる事ができるようになったので実験に取り掛かったが、またもやトラブルの続発であった。 思わぬミスがどこまでも足を引っ張っている感じである。
.
今回は、それにもめげずに頑張ってきた。 自分に取っては貴重な体験なので、ここに記録として残しておこう。
 .
.
■ C58-127号機の性能測定
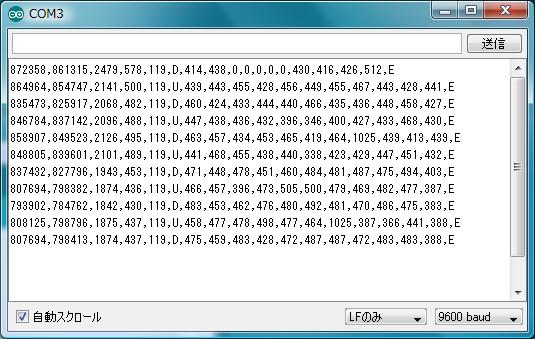
当初の目的である “ SLのモータ回転数を測定しよう ” の実験に取り掛かかった。 測定を始める前に、シリアルモニタ画面にて、Arduino から送られてくるデータをチェックした。 右の画面。 サテライト・ユニットからのカウント時間データもしっかりと送られてきているようなので、まずは一安心である。
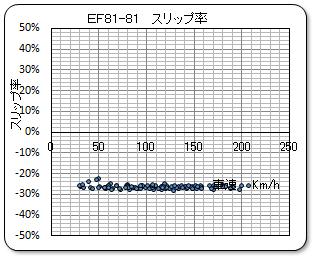
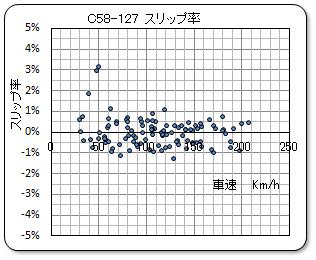
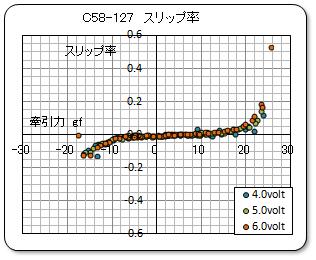
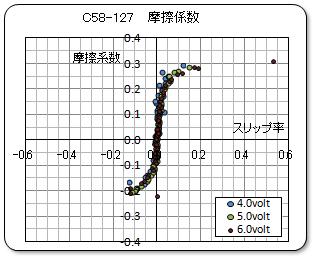
そして、手始めに速度特性を測定した。 データの測定中は、今回のメインテーマであるモータ回転数を測定して動輪のスリップ率を計測するデータを注視していたが、下のグラフの様に異常データを示していた。
 .
.
この速度特性は、平坦路無負荷走行の状態であるのでスリップ率はゼロ近辺の筈であるが・・・・・・・・・? そこで、測定を中止して各部の動作状況をチェックしたが、異常は見つからなかった。
もしやと思い、測定データを計算する場合のギヤ比と動輪直径のデータをチェックしてみた。 このデータは、以前に調査したデータを使用してEXCELで計算しながらグラフ化している。
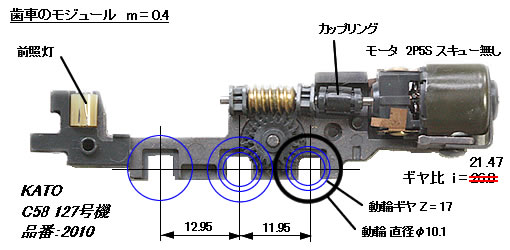
そのデータは、マイコレクションのC58-127号機のページに示した右のイラストに示しているが、この図に間違いがあったのである。
ギヤ比を再計算してみると、 i = 24 * 17 / 19 = 21.47 が正解なのである。
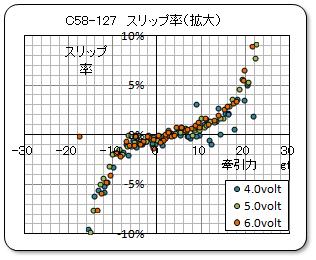
通常は動輪のギヤの歯数の方が多いので、ついつい間違った計算していたようである。 ギヤ比を修正してデータを整理すると、スリップ率はゼロ近辺に集まり、動輪直径をφ10.2 に修正するとさらにピッタリとなった。
モータの回転数計測は正常であることが判明したのでヤレヤレである。 なお、上記のグラフのタイトルは、前の測定時のままであるのであしからず。 タイトル等の修正は、いつもデータが仕上がった時に実施している。
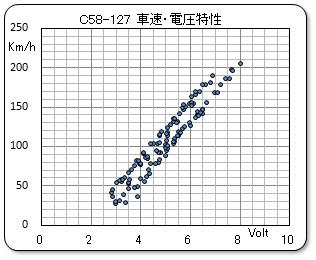
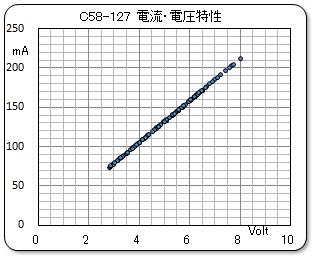
速度特性に関する測定データを下に示す。
 .
.
今まで見慣れ来たデータであるが、いろいろ不思議な現象が表れている。
まず、車速・電圧特性であるが、プロット点が2段になっている。 上段のデータは測定後半のもので、測定中にドリフトしたものと思われる。 マイコレクションに記載した以前の測定データは、この上段のデータと殆ど同じであることから、動力機構のどこかにコジレが有り、運転中にそれが解消されたのではないかと推定した。
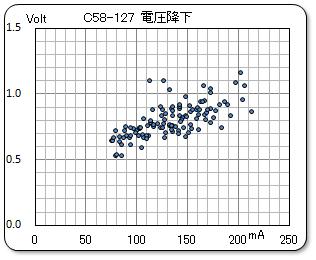
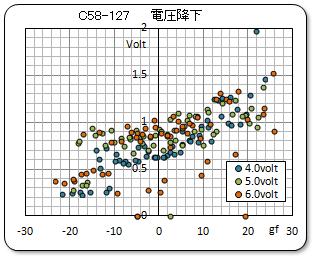
一方、電流・電圧特性は、この時のデータとは傾向が異なっているが、何故だかは良くわからなかった。 電圧降下とスリップ率のグラフは、この車両に関して今回が初めての測定であり、フムフムと思いながら眺めていた。
**************************************
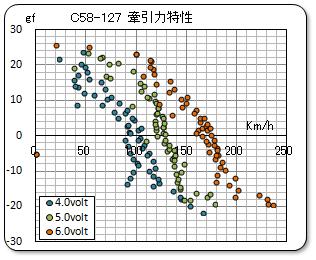
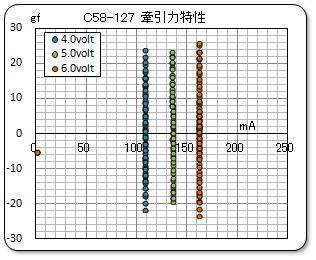
次に、動力特性を測定した。 下にそのグラフを示す。
牽引力特性は、ややギクシャクした動きがそのままデータに表れており、以前のような綺麗なデータとは大きく異なっている。 センサ取り付け作業の影響は無いと思うが・・・・・・・・。 そして、牽引力と電流のグラフを見て驚いてしまった。
なんだ! このグラフは?
縦に綺麗に一直線ではないか! これは、牽引力によっては電流が変化していなことをしめしているが、しかし、供給電圧では変化していることを示している。 こんなこと有りなのか? そういえば速度特性の時の電流値のデータもおかしかった・・・・・・・・・。
その他のデータは、納得の行くデータと判断した。
 .
.
■ 異常な電流値測定の原因調査
電流の値がおかしいままでは、性能測定が出来ないのでその原因を調査した。 まず、Arduino に重ねたシールドの不良を想定して、シールドをひとつずつ取り外した状態で速度特性を測定した。 その時の電流・電圧特性を下に示す。
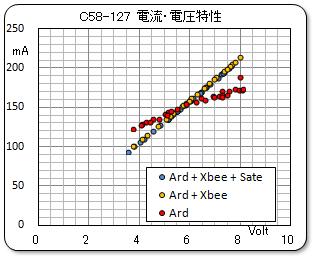
やはり、シールドのどこかがおかしく成っているようである。 そこで、電流値の小さいEF510-510号機を持ち出し、シールド類を取り外した状態でもう一度測定してみた。
 .
.
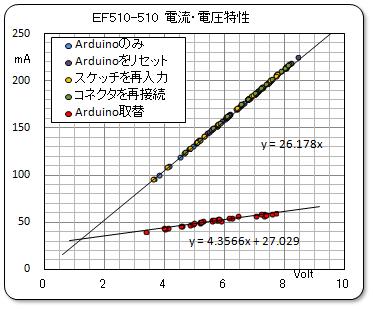
その時のデータを右に示す。 上記の測定時のようにArduino だけの時と異なり、電流値の小さなEF510-510 号機なのに測定データは今までと同じではないか・・・・・・・・・。 そんなばかな?
原因は、
- スケッチがどこかがおかしい。
- コネクタの接触不良。
- 電流検知部が故障した。
- Arduinoが壊れた。
- その他・・・・・・・・・。
などが想定されるので、いろいろテストしてみた。 電流と電圧のプロット点より勾配を計算すると、38.2 Ωの抵抗が接続されている場合の電流・電圧特性を示しているようである。 どこの抵抗・・・・・?
そして、オシロで使用していた Arduino と交換し、スケッチも入力し直して測定した結果が、右のグラフの赤いプロット点である。 EF510-510号機の昔のデータとピッタリである! 結論として、
Arduino が壊れていた!
Arduino のアナログポートが壊れていると結論したが、他のポートは正常かどうかは不明である。 また、ポートが壊れるとこの様なデータになる原因も良く判らないが、とにかく、これではこのArduino は信用出来ないので、使用出来ない事は確かである。 電圧測定用のポートも変になり、速度特性中にドリフトしたのも、もしかして、この影響だったかも知れない。
Arduino まで壊してしまったことにガックリとしたが、とにかく原因が判明したので、Arduino を交換して対応する事にした。
■ 測定の再挑戦
 .
.
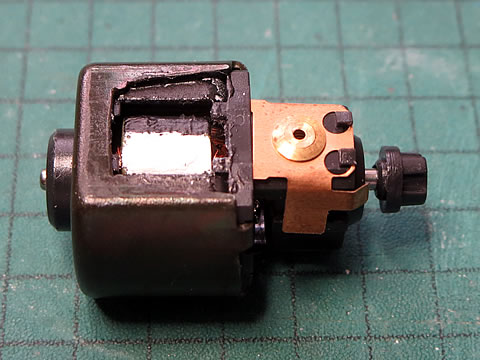
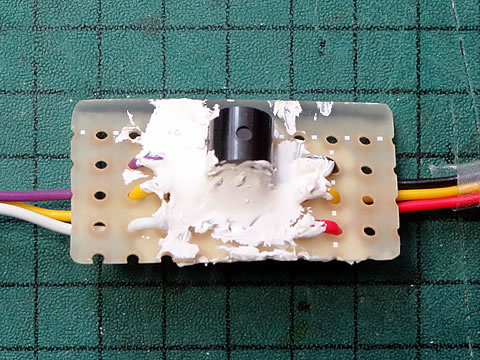
C58-127号機の動きがやや不良だったので、車両をKATO のC57-180 号機に変更して再挑戦することにした。 この車両において、回転数センサのための白黒のマーキングをどこに付けるか迷ったが、モータのロータにペイントすることにした。 大きな窓が開いているし、一回転に5個のパルスが出るので精度が上がると考えたからである。 (これが大間違いであったのだ・・・・・・・・・)
下左にその時のモータの写真を示す。 モータのロータ外周は磁石とは僅かな隙間があるので、白と黒のアクリル塗料を薄く塗るようにしたが、磁石と干渉して筋が入るなど苦労した。 ペイント状態をイラストにて右に示す。 白黒のパターンが均等になるようにし、スリットの奥も黒く塗っている。
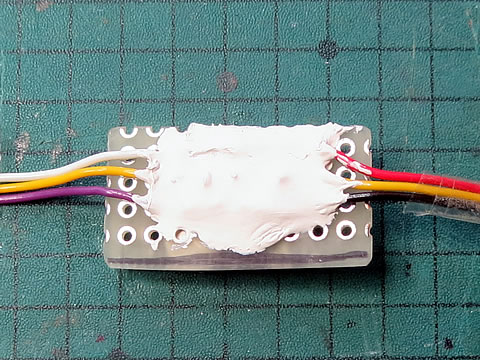
また、モータ回転数センサは正常に作動する事が確認出来たので、配線の絶縁と保護のために、白のタミヤパテを塗った。 下の写真。
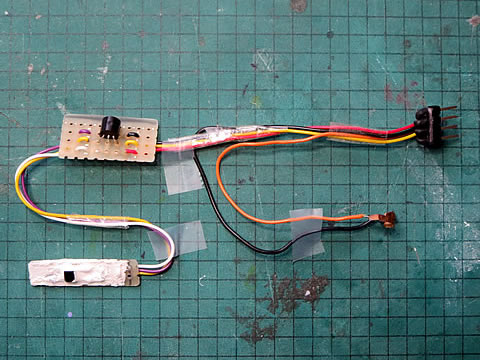

センサを車両に取り付けた状態を下に示す。 相変わらずセロテープでのグルグル巻きである。


準備OKで、測定台による測定を再開した。 しかし・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・。
サテライトのカウントが反応しない!
LEDはダンマリの状態である。 またもトラブル発生・・・・・・・・・・・・。
 .
.
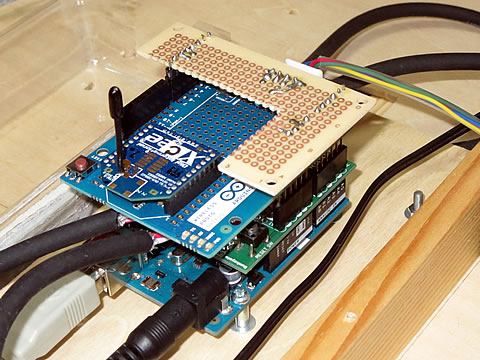
■ ベンチでの確認テスト
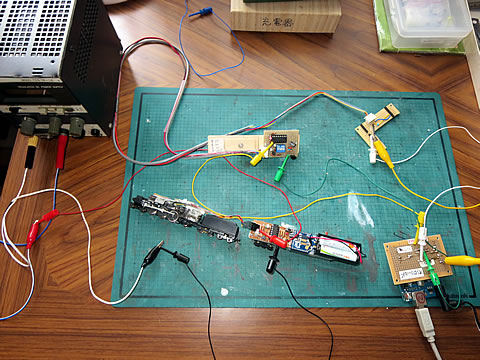
この様な時は、順を追って確認すべきであった。 そこで、車両と測定車をベンチ状態(右の写真)にて確認する事にした。
オシロ用のArduino は使ってしまっているので、物置室のレイアウトに設置した速度計のArduino を取り外してオシロ用のArduino に仕上げた。
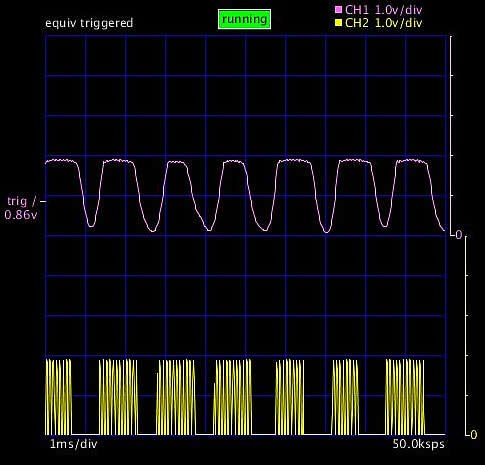
まず、測定車でのセンサ出力をCH1に、赤外線LEDの入力をCH2 に接続して観察したオシロ画面を下左に示す。
回転センサからの出力は、確実にかつほぼ均等にパルスとして発信されている事が判る。 ちなみに、 10msec の間にパルスは7山が発信されているので、
700山/1sec = 42,000山/min
モータ1回転当たり5山であるから、8,400 rpm と計算される。 合っている!
次に、受光ユニットの出力をCH1に、Q1'端子をCH2 に接続した時の状態を下右に示す。 左右の画面を比較して欲しい。 時間スケールが異なるが、CH2のQ1'端子を見る限り、パルスとしてカウントされていない事が判る。
何故 カウントされなおのだろうか ?
その原因はすぐに分かった。
動力車の電圧を下げてモータの回転数を下げた状態を下の左右に示す。 モータの回転数が下がるとパルス間隔が伸びるにつれて、Q1にはパルス発生をしめす電圧が発生している事が分かる。 また、LEDのそれにつれて点滅を始めたので、カウンタが作動始めた事が分かった。
波形パターンをじっくりと観察すると、リモコン受光ユニットの出力電圧が約 2.5volt (オシロのゲインは1:1に設定)以上にならないとカウンターは受け付けないようである。カタログを見ると、3.15volt 以上と記述されている。 これらの値に少し差異はあるが、厳密な測定ではないので妥当な値と判断する。
カウンタの説明では、立ち下がり時にカウントするので、この現象は影響ないように思えるが、カウンタがHIGTを認識してもらわなければ、立ち下がりの認識も出来ないのは当然である。 従って、カウンタには入力されなかったのでダンマリの状態となったと判断した。
リモコン受光ユニットの出力の立ち上がりは、徐々に上昇していくのであるが、途中で時間切れになってしまい、信号はゼロに落ちてしまうのである。 従って早い信号には追いつけない、反応出来ないと推定した。
最後の画面は、4山/20ms なので、2,400rpm、その前の画面は、5.5山/20ms なので、3,300rpm、その前の画面は、17山/20ms なので10,200rpm のモータ回転を示している。 3,300rpmではパルス飛びも発生しているし、10,200rpmでは完全にノーパルスである。 残念ながらこれでは模型車両のモータ回転数は測定出来ないのである。
それにしても、リモコン受光ユニットの出力は何故パルスのような鋭い立ち上がりをしないのだろうか。 リモコン受光ユニットのノイズ対策として追加したCRフィルタが悪さしているのではないかと疑っているのである。
 .
.
パルスが早いと受光ユニットの出力が追い付かずカウンターの入力が受け取れないのだ!
対策はどうしようか?
モータ一回転当たり5パルスが駄目なら、2パルスは大丈夫なのだろうか?
そこで取りあえずロータのマーキングを右のように印すことにした。
5スリットなので均等なパターとはならないが、様子を見ることは出来るだろうと考えた。
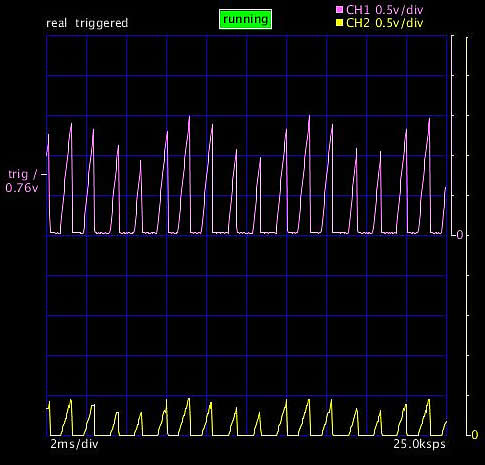
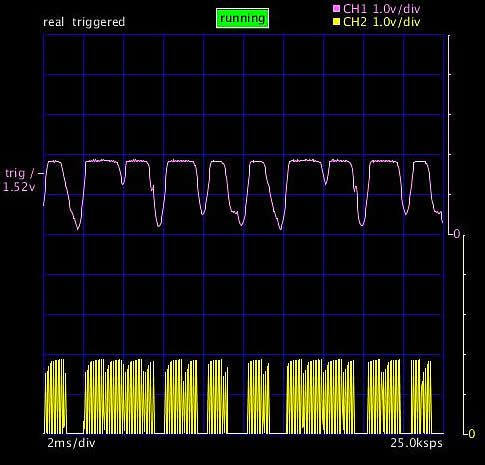
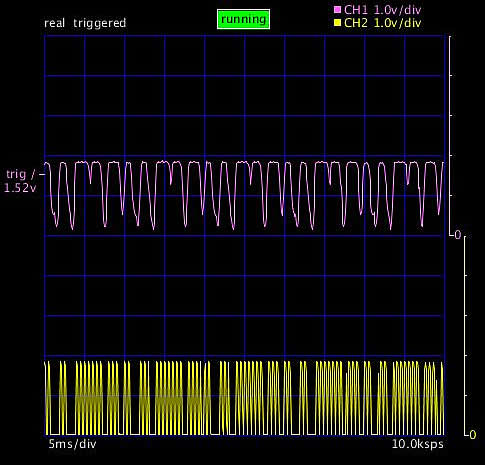
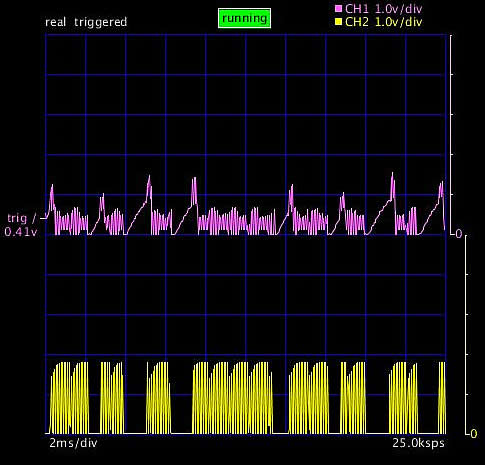
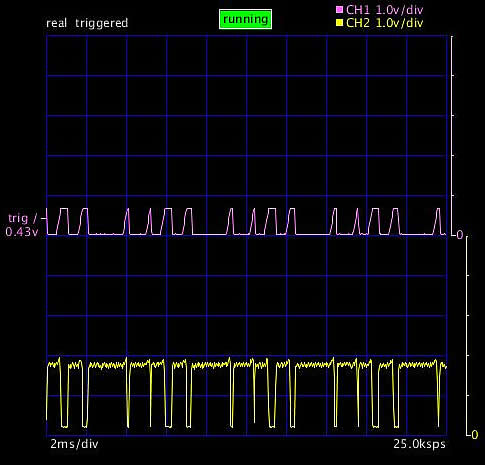
その時のオシロ画面を下に示す。 測定車でのセンサ出力をCH1に、赤外線LEDの入力をCH2 に接続して観察したものである。 自分が想定したパターンとは違っていたのである。 下左は2ms/div、下右は5ms/div とスイープ時間を変えてみているが、5個の山が見えており、その内の4個の山でパルス化しているのである。 どこが白マークで、どこが黒マークなのか判明しないのだ。 センサの動作から推定すると、黒パターの部分でも赤外線を反射して、認識しているように思える。
今回のマーキングは手を抜いて、黒マークをマジックインキで塗ったのであるが、そう言えばテカテカと光っていたような気がする。 後から確認したが、確かに光沢があったである。 この光沢に赤外線が反射したとしか思えない。
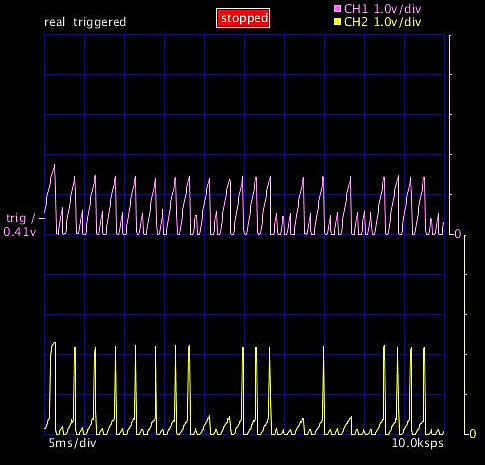
次に、受光ユニットの出力をCH1に、Q1'端子をCH2 に接続した時の状態を下左に示す。 下右の画面は、モータの回転数を変えてみた。 Q1ポートはダンマリである。

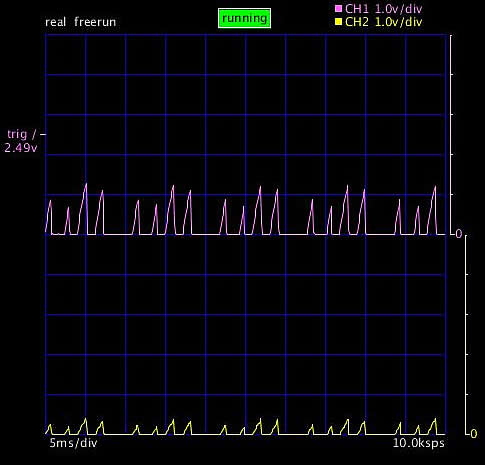
白黒のパターの内、どれがカウンターのクロックとして有効なのかを検討しようとしたが、頭が混乱して止めてしまった。 とにかく5山のパルスは無理があるようである。
また、受光ユニットの出力の立ち上がりパターンを見ていると、約 1ms 後に急速に立上がっている事が分かる。
この反応時間の 1ms を確保するには、マークの間隔をどれくらいにすれば良いか計算してみよう。 今まで実施してきた2マーク/1回転の場合について計算した。 マーキングパターの内、モータ回転の90°毎に白と黒を塗り分けるとして、最初の45°でこの立上時間を確保し、その後の45°でパルス発生を促すとすると、モータの回転は、一回転当たり、8msec 以上を必要とする。 これは7,500 rpm 以下の回転でなかればならないことをしめしており、これ以上の回転数では、 1ms の立上時間を確保出来ない事になる。 ショック!
自分の頭では混乱して理解できていないが、賢明な諸君のために参考となる画面を紹介しよう。 下左の画面は、サテライトユニットのリモコン受光ユニットに、TVのリモコンを照射した時の画面である。 受光ユニットの出力をCH1に、Q1端子をCH2に接続している。 分圧ゲインはそれぞれ 1:2 である。 パルス飛びが発生している部分や、小さな山の部分もある。 リモコン信号のパターンの影響かと思われる。
上右の画面は、受光ユニットの出力をCH1に接続し、分圧ゲインは 1:2である。 また、CH2は測定車両の赤外線LEDの信号を接続し、分圧ゲインは 1:1である。 受光ユニットの出力は、赤外線信号が切れた時にじわじわと上昇し、信号が入ると暫くしてストンと落ちている・・・・・・・・・。 現象が理解できない!
兎も角も、CRフィルタが悪さをしているような気がするが、折角のノイズ対策である。 なんとか生かせないだろうかと頭を絞った・・・・・・・・・。
受光ユニットの出力が上昇始めたら、 1ms も待たずに急激に電圧を上げる、即ちスイッチング・トランジスタを入れて信号を拡大したらどうであろうか。 閾値を小さくしておけば、その出力はパルス状になるのではないか。
早速、実行してみる事にした。 受光ユニットの出力とカウンタ入力の間にトランジスタを挿入するアイディアは、ブレッドボードでも実験したことがあるので、この対策案が別の意味で生きてきそうである。
 .
.
なお、 CRフィルタが悪さをしているようであれば、SHARP 製のカタログに記載されていたCRフィルターを実装すると良いとの記述は、SHARP 製だけに適応されるもので、他社製品には問題になることになる。 実際に上記のオシロ画面からもその事が言えそうである。
■ サテライト・ユニットの回路修正
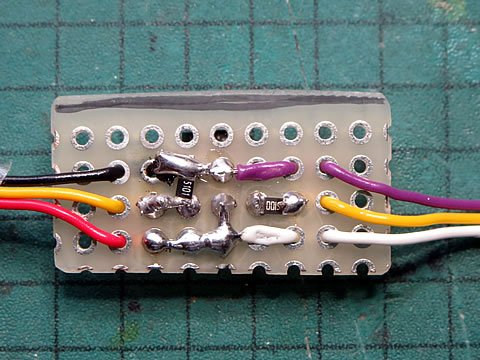
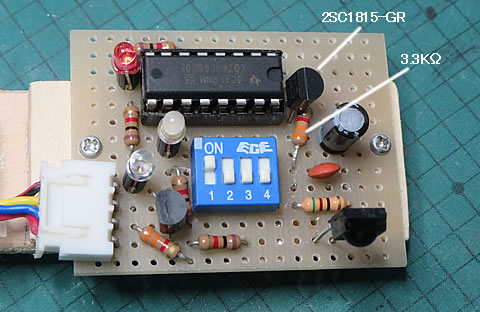
受光ユニットの出力とカウンタ入力の間に、トランジスタ 2SC1815-GR を 3.3KΩのプルアップ抵抗と共に挿入し、プラス側はCRフィルタを通る前に接続した。 右の写真に示す。
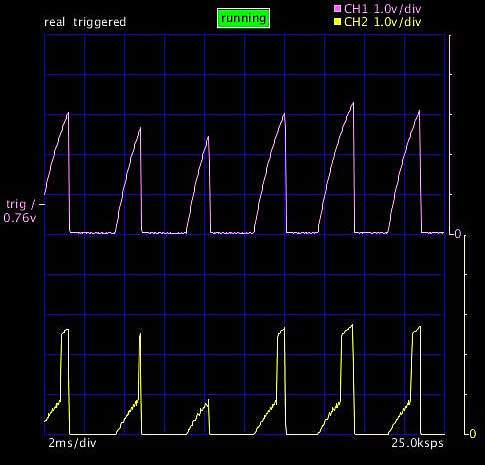
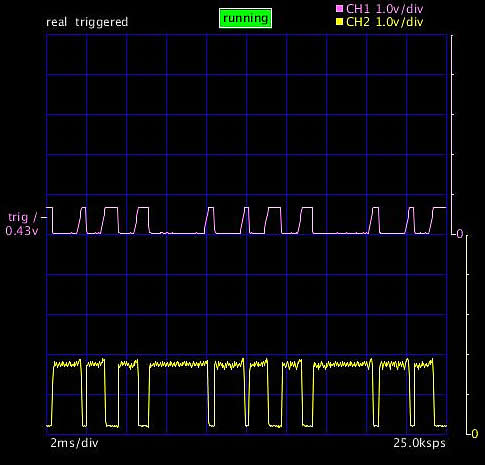
上記と同じベンチテストにて動作を確認する。 受光ユニットの出力をCH1(ゲイン1:1)に、トランジスタの出力をCH2(ゲイン1:2)に接続した状態を、下左の画面に示す。 5個の山のうち、4個の山をパルスとしてカウンタに入力されているのがわかる。
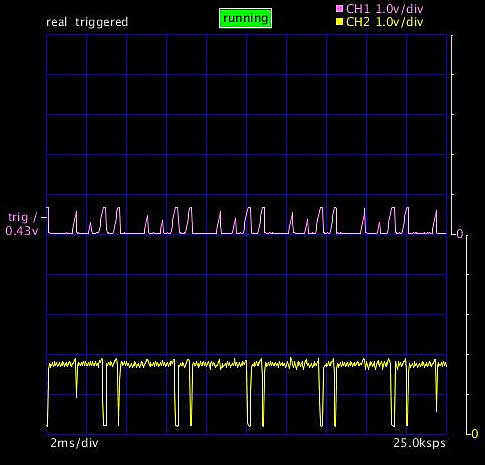
次のモータの回転数を上げた状態を下右の画面に示す。 カウンタには2個のパルスしか送られていないようである。
 .
.
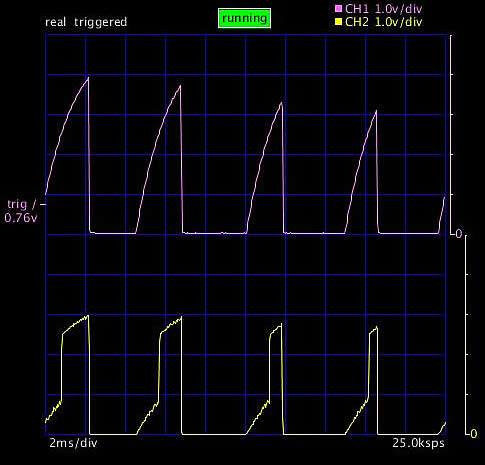
モータの回転数をこれよりも下げると、右の画面のように4個のパルスが確認出来る。 この時のパルス間隔より、モータ1回転は 5msec と読み取れるので、モータ回転数は12,000rpm と計算される。 この回転まで対応出来るようになったのだ。
また、サテライト・ユニットのLED は頻繁に点滅を繰り返しており、トランジスタ追加は効果があったと判断する。
ただ、この様な電子回路の知識は充分でないので、トランジスタの使い方として適切なのかは分からない。 受光ユニットの出力とトランジスタのベース間は直結にしているが、抵抗がいるのかどうかも判断出来ていないし、プルアップ回路が良いのかどうかすらも分からずに実施している。 従って、受光ユニットの出力電圧が小さくなっているのが正常かどうかも判断できないが、とにかくカウンタには入力されているので良しとしよう。
また、モータ回転数検知用のマーキングは、5パルス/回転は測定の限界に入っていること、マーキング作業が難しいこと、さらにモータの磁気の影響も気になるので、ロータへのマーキングは止めた方がベターであると判断した。
■ まとめ
またまた、ドル沼に引きこまれてしまったが、なんとか脱出することが出来たようである。 次回は、きっと旨くいくと信じて作業することにしよう。