
HOME >> 鉄道模型実験室 > モータ特性を測定しよう その7 出来た
鉄道模型実験室 No.118 モータ特性を測定しよう その7 出来た
■ はじめに
先回の実験で、いくつかの問題点も見えてきた。 そこで、これらの対策を実施したのでその内容を紹介しよう。
■ 与圧レバーの力の掛け方の改善
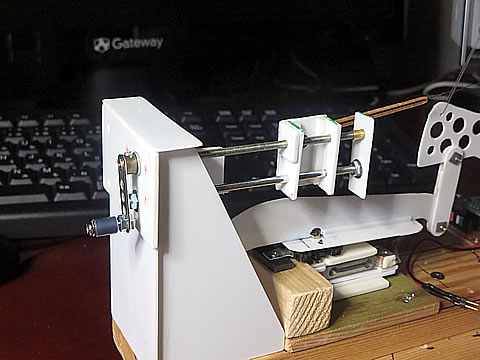
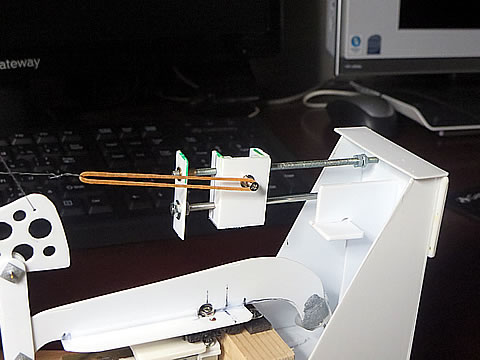
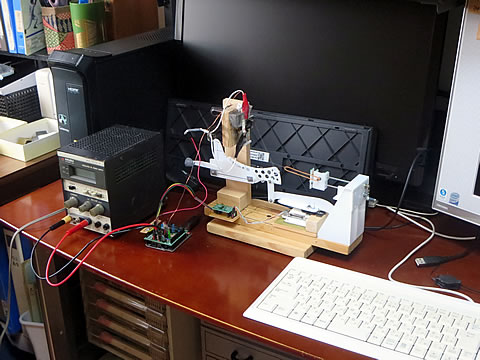
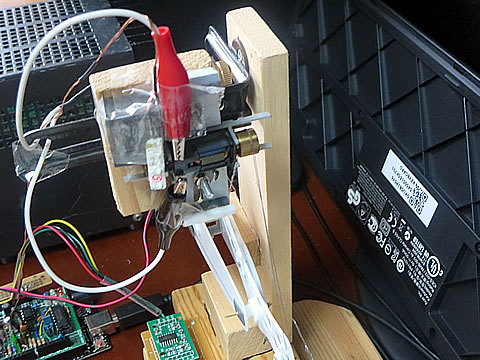
与圧レバーの調整は、模型飛行機のようなゴムを捻じって力を調整する方法であったが、操作がし難いので下の写真に示すような構造に変更した。 100mm の長さのM3 のネジ棒を使い、φ3.0mm の両端にネジが切ってある丸棒をガイドにして、左右に動くボックスを作った。 あたかもSLのクロスヘッドと滑り棒のようである。
 .
.
これらは、タミヤのテクニクラフトシリーーズの残り部品を活用したものである。 手前のハンドルを回すとボックスが移動して輪ゴムを引っ張るようにしている。 なかなかスムースの動いて調子は上々である。
■ 無負荷状態での測定
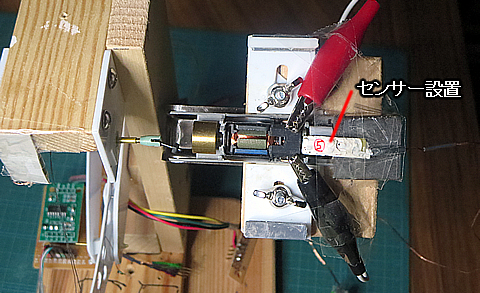
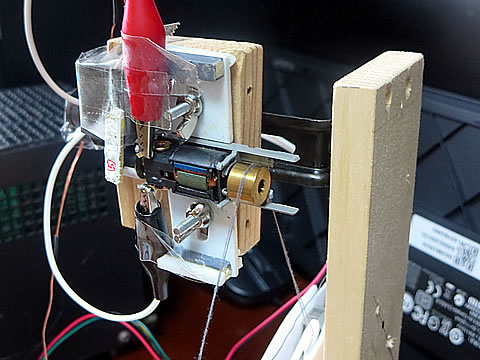
モータ単独の状態で測定する必要があるため、回転数測定をモータ軸から直接測定するようにし、ジョイントを外した状態で測定するようにした。 回転数センサの取り付け状態を右の写真に示す。
幸いにも回転センサーはいくつも作っていたので、No.5 のセンサーを使用した。 シールドやスケッチはそのまま使用出来た。 そして測定結果をみて、愕然とした。 その違いが大きかったのである。
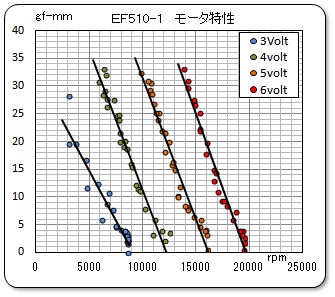
張力プーリを連結していた先回のデータと比較しtものを下のグラフに示す。 先回の測定中は、回転音が高くてハラハラしていたが、モータ単体状態では当然ながら全く静かである。
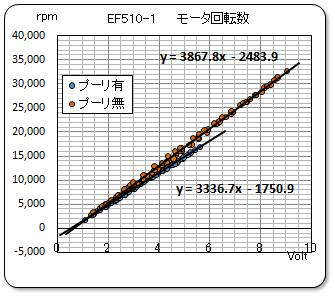
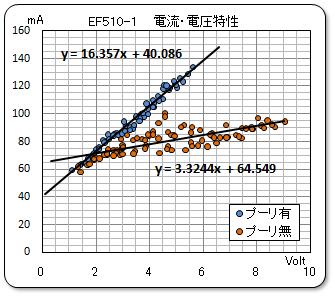
このデータより、良かれと工夫した張力プーリ方式がもろくも崩れ去ったのである・・・・・・・。
 .
.
■ 張力プーリーの摩擦トルクの推定
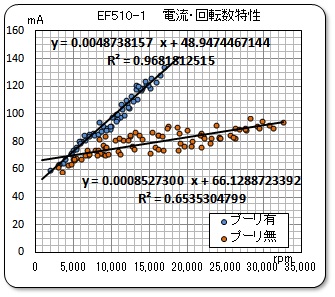
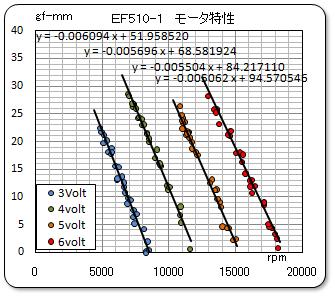
張力プーリーの有無によって電流値に差が発生するのは、張力プーリーの回転摩擦トルクが影響していると判断できるので、その差から摩擦トルクを推定できると考えた。 そこで、右上のグラフの横軸を回転数に取って表示したグラフを右に示す。
それぞれのプロット点より近似線を求め、二つの直線の差を整理し摩擦トルクの電流値換算を求める。
モータの電流値で換算: δI = 0.00402 Nm ー 17.18 [ mA ] Nmはrpm
トルクに換算する場合には、トルク定数Kt を掛ければよいが、この係数( EF510-1号機の場合は Kt = 230 )を求めた時の電流の単位が A なので、これを考慮すると、
トルクに換算: δT = 0.0009246Nm ー3.9514 [ gf-mm ]
となる。 10,000 rpm では、13gf-mm 20,000rpm では、22.4gf-mm となり結構な摩擦トルクとなっていることが分かる。 回転部分はベアリングしかないのでこのベアリングが原因なのだろうか? 4駆用のベアリングなので十分と思っていたが模型用はあくまで模型用なのだろうか? あるいはモータ軸との連結部であるユニバーサルジョイント部であろうか?
とにかく、この張力プーリー部でこれだけの摩擦トルクを食っていることは、トルク測定のデータが信用出来ないと言うことである。
もっと本格的な軸受け構造にする必要があるのだが・・・・・・・・。
■ フライホイール部を利用したトルク測定
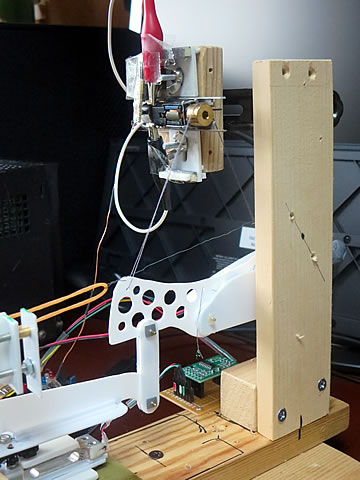
以前も実施したことがあるモータのフライホイール部を利用した最も確実な方法が手っ取り早いので、下の写真のように装置を改造した。
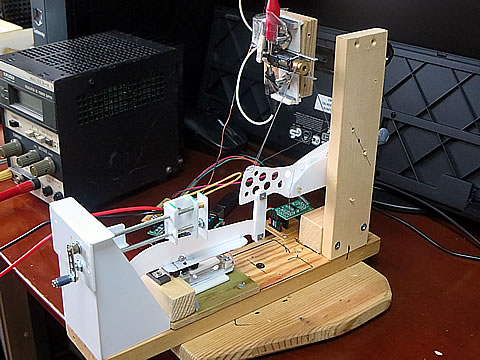
モータのフライホイール部分が、いままdの張力プーリーの位置に来るようにモータの取り付け方法と位置を変更した。 張力プーリーはφ6.0mm であったが、フライホイールはφ10.5mm である。 このため、中心位置を2mm ほど下げた位置に何とか固定することが出来た。
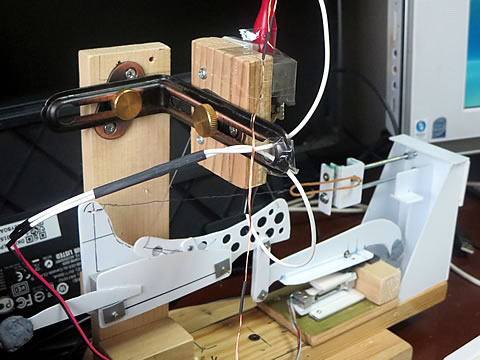
クリップなどの配線とセンサーはセロテープをべたべたと貼って、測定中にぶらぶらしないように固定している。 見た目は悪いがこれで充分である。
測定結果のグラウを下に示す。 比較のために先回のグラフも右側に並べて置いた。
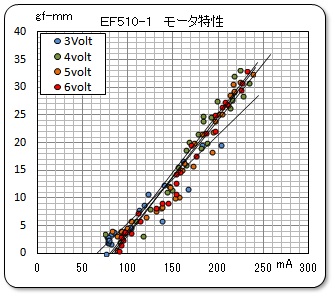
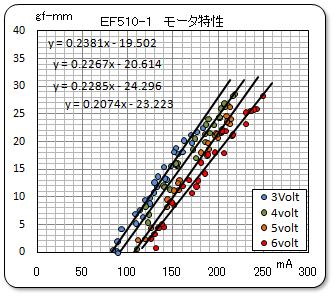
左右のグラフを比べてみると、その違いは明らかである。 前記のグラフより当然ながら、電圧が高くなって回転が高速になるほど違いが大きくなっているのが分かる。
そして、トルクと電流は直線上に固まって来ているが、これはトルクと電流の関係が理論どうりに単純な関係式で表せることを示している事を示しているのだ!
■ まとめ
Nゲージ用モータの特性を測定しようと、微小トルク測定装置をいじって来たが何とか物になるものが出来上がって来た。 この間に失敗も多くあったが失敗のノウハウとして記録しておこう。
そして、この装置を使って何をしようとしているのか、その進め方として次の二つの事を考えている。
- 他のモデルのモータについて数多くのデータを収集し、Nゲージ用モータの特性として整理しておく。 そして、この測定装置と得られた測定データの信頼性を高め、今後の解析のための知見とする。
- 以前に実施した動力車の動力特性の解析を再開する。 その後に検討した走行中のモータ回転数と端子電圧の測定を既に実施しており、これによって電圧降下量やスリップ率のデータを得ている。 そして今回、より確実なモータ単体での特性測定が出来る様になった。 このため、動力特性の解析がより精度よく実施できるのではないかと期待している。
まずは一番目の方針で進める事にしよう。
2016/10/10 作成