
HOME >> 鉄道模型実験室 > 新しい測定方法での自動運転制御
鉄道模型実験室 新しい測定方法での自動運転制御
.
■ はじめに
先回、新しい測定方法を検討したが、最終的にはNo.14 の自動制御運転を取り入れた「 小判型+8字パターン」に落ち着いた。 その時に、運転制御方法も検討したのでここで報告しよう。
 .
.
.
■ 小判型+8字パターンでの自動運転制御方法
まず、小判型+8字パターンを右に示す。 このレイアウトの特徴は、外周部に4個のポイントを設けて、内側の空間に、二つのリバース線を構成することである。 このリバース線を利用して、周回路の進行方向を逆転させ、信号線の捻じりを戻す様にして、有線通信の利用を可能にさせようとしたものである。
運転に当たっては、進行方向を逆転させるため、二つの給電ポイントを設け、さらに2ヶ所のギャップを設けている。 また、分岐ポイントは完全選択式タイプのポイントが必要である。 ここでは、TOMIXの 1273/1274 の完全選択式電動ポイント N-PR280-30(F) と N-PL280-30(F) を使用している。 また、センサーの位置はまだ未検討である。
制御シーケンスについて、文章で説明するよりも図解の方が解り易かったので、イラスト化して下に示す。 制御シーケンスは、下の図の右回りに実施する。 気を使った点は、ポイント操作と電源反転のタイミングである。 プラス時を赤色、マイナス時を黒色で色分けして確認している。 順序を間違えるとシュートが発生する状況となる。
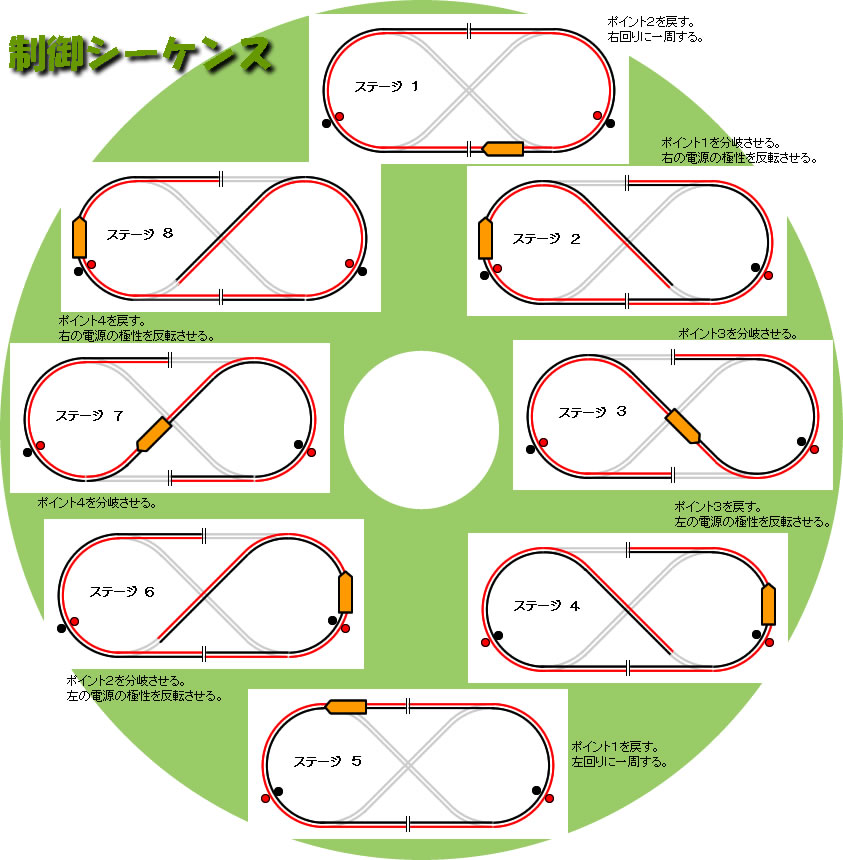
運転シーケンスは、
- 右回りで一周する。
- リバース線を使って進行方向を変更する。
- 左回りで一周する。
- リバース線を使って進行方向を変更する。
の繰り返しである。 動力特性の測定は、直線路を走行している時に測定するが、右方向だったり、左方向だったりするのでプラグラムでの工夫が必要となるであろう。 また、リバース線を走行中に傾斜台の角度を変更すれば、測定タイミングもスムースに実行できそうである。
■ 課題の検討
ここでも課題を検討しておこう。 制御は Arduino を使ってコントロールすることを前提に考える。
- 1)車両位置センサーの設置場所と方法
- シーケンスステップのタイミング判断は、車両の位置を確認しながら実施する必要がある。 重要なのは、上の図のステージ2、4、6、8に示した車両の位置と考えている。 このタイミングでシーケンスを作動させれば良さそうである。 想定外状態に対する対応は、おいおい検討することにしよう。 また、センサーとしては厳密なタイミング計測を必要としないので、TOMIX のセンサーを活用するつもりで行こう。
- 2)電動ポイントの駆動
- Arduino を使ってポイントを制御するには、コイルの焼き付け防止を考慮する必要があるが、ネットで自作のポイント・ドライバーの紹介が有ったので、これを参考にして自作することにしよう。
- 3)電源の反転スイッチの制御
- Arduino のPWM制御を利用して走行用電源とする考えもあるが、電源の安定性には自信が無い。 測定データの信頼性を考慮して、これまでのように安定化電源を使って、その電極の切り替えをリレーを使って実施することにしよう。 例えば、2C接点式のリレーを使えば出来そうである。
- 4)Arduino は共通使用が出来るか
- 計測用の Arduino と運転制御用の Arduino は、一つで共通使用が可能だろうか? 計測タイミングと制御タイミングが重なる事はないので、共通化は可能な様であるが、計測用のセンサポートが増えることを考えると、別々にするのが得策な様に思われる。
■ まとめ
机上では、有線通信の信号線をぐるぐる巻きにしないような走行・・・・を実現するための自動運転は可能と判断する。 でも、実際のレイアウトを構成し、想定外の問題点を抽出し対策を打ちながら、システムとして確立していく必要があるだろう。 このためには、ミニレイアウトでも充分であるので検討することにしよう。 上手くいけば単独システムとしても遊べそうである。