
HOME >> 鉄道模型実験室 > XBeeを搭載したドクターカー その4 内回り線を測定する
鉄道模型実験室 No.127 XBeeを搭載したドクターカー その4 内回り線を測定する
■ はじめに
先回は外回り線を測定したので、今回は内周り線を測定することにした。 さらに、処理ソフトの改善と、KATO 製のパワーユニットを使用した場合でもチェックしてみたが、思わぬ結果になってしまった。
■ 内回り線の測定
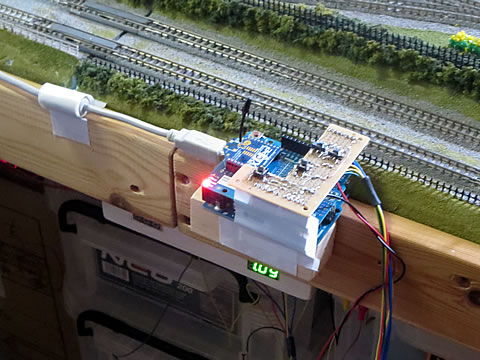
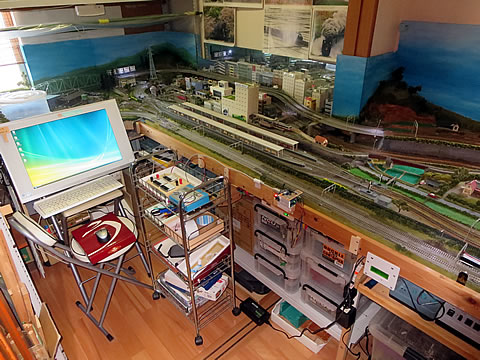
測定方法は、外回り線と同じであるが、センサ信号の取り出し場所が異なるためにその対応を実施した。 無線基地はレイアウト手前の框部分に設置している。 いちいち配線するのは面倒なのでそのうち改善しよう。
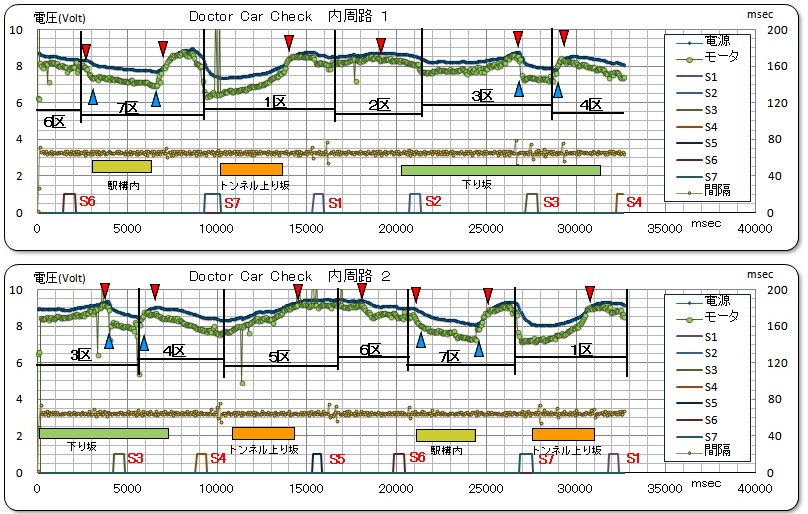
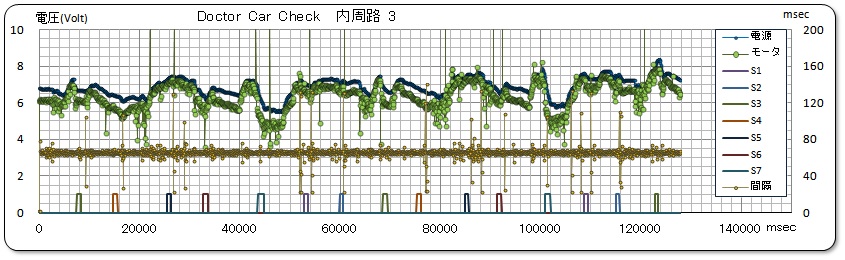
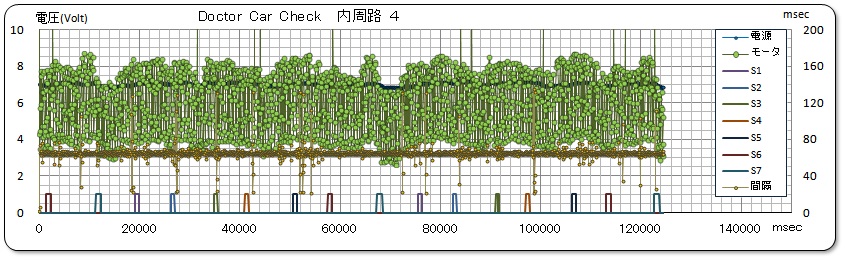
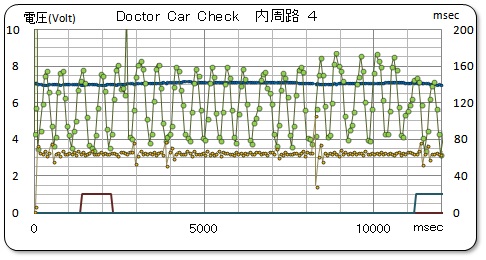
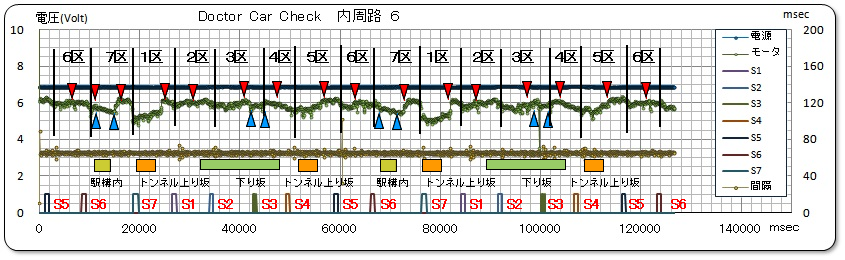
測定結果をまとめて解析したものを下に示す。
import processing.serial.*;
Serial myPort;
String datastr;
PrintWriter output;
int count = 1;
void setup()
{
println(Serial.list());
myPort = new Serial(this, Serial.list()[0], 9600);
myPort.clear();
output = createWriter("DoctorCar-log.txt");
}
void draw() {
if (count>2000) {
output.flush();
output.close();
exit();
}
count++;
if ( myPort.available() > 0) {
delay(70);
datastr = myPort.readStringUntil('E');
output.print(datastr);
}
}
内回り線も駅構内のポイントに挟まれた区間は電圧降下が大きいようである。
■ パソコンの処理ソフトを変更する
EXCELと Easy Comm を使ったデータ取り込みでは、処理速度が追いつかない問題があった。 他の参考資料を見ていたときに Processing と言う方式の説明に目が留まった。 この方式では、シリアル通信の処理が容易で、さらに受け取ったデータをファイルにも保管出来るとのこと。 どんどん送られてくるデータを加工せずにそのままファイルに保存できれば、測定終了後にゆっくりと解析してグラフ化すれば効率的に測定処理が出来ると考えた。
この Processing ソフトは、簡易オシロスコープソフトでインストール済みなので、対応プログラム(Arduino と同じくスケッチと呼ぶらしい)を作成すればよいのである。 あるサイトの記述を参考にして、いろいろな処を読み漁り、あれこれトライを実施した結果、右に示すようなスケッチに落ち着いた。
 .
.
 .
.
通信ポートを読み取るタイミングとして、delay( ) の設定をいろいろ変えてみた。 取得するデータを切り取るタイミングが問題であり、切れ切れのデータになっている状態であった。 そこで、送信してくる間隔は、およその平均で 68msec であることが先回の調査で分かっていたので、delay(70) に設定した。 しかし、これでも途中でミスる場合もあるし、一行分開いてしまうのである。 このため、output.println の記述を output.print に変更して ln の部分をカットし、さらに読み取り命令を myPort.readStringUntil('E') に変更して、エンド記号の "E" まで確実に読み取るようにした。
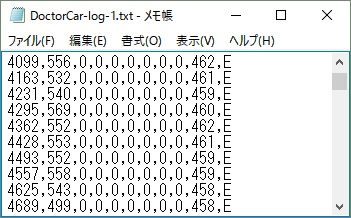
実際の測定時には、上の写真のように小さなウインドウが開いているだけであったが、実行完了後には、所定のファイル内に、データが記録されているファイルが保存されていた。
そのファイルの状態を右に示す。 そしてEXCELよりこのファイルを呼び込み、そのデータ欄を従来のシートの測定データ欄にコピーペーストして、グラフ化の処理を実施した。 そのグラフを下に示す。
測定後のデータ処理は少し面倒であるが、測定は一回で済むし全体のデータ具合が一目で見ることが出来る。 欠点は、グラフ化しなければ状態が把握できない点であろう。
■ KATO製のパワーパックを使用する
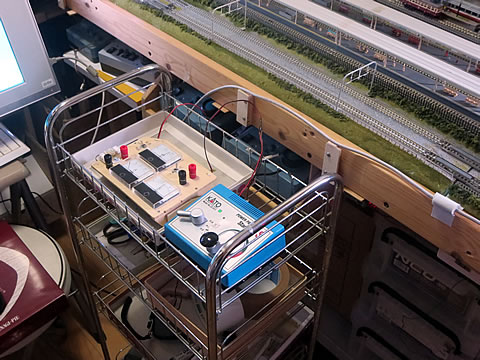
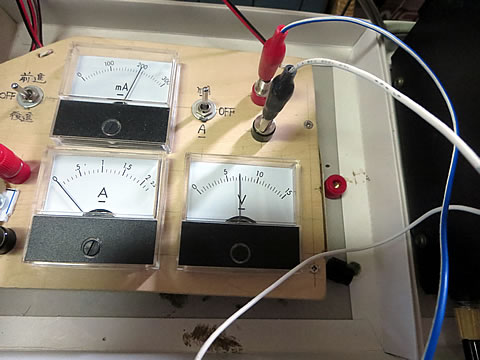
TOMIX 製の場合、パルス(PWM)制御方式の N-1001-CL と通常制御方式の N-401 を使用してその違いを確認したが、同じ通常制御方式の KATO 製のパワーパック POWER PACK Standsrd S Model No.22-012 を使用して、同様に測定を実施した。 写真に写っている測定ユニットは昔作成したもので、入力側と出力側にはTOMIX 仕様とKATO仕様のコネクタが接続されており、電源と給電線はどちらのメーカーの物でも容易に接続出来るようになっている。 意外と便利ですね。
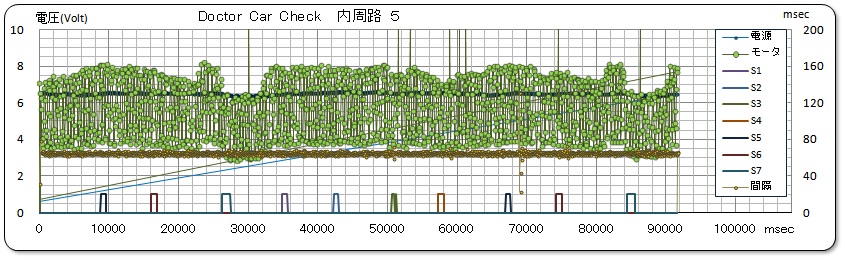
測定結果を下に示す。 グラフ化して驚いた。 何が起こっているのだろうか?
 .
.
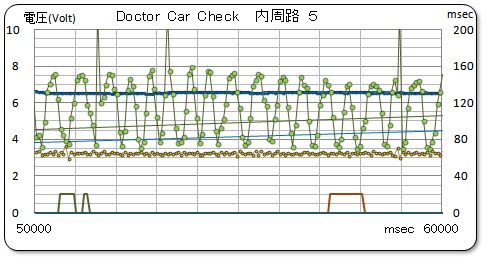
状態が理解できないので、時間軸を部分的に拡大して観察した。 そのグラフを右に示す。 モータ端子電圧が上下に振れている。 このような場合には、まずレールの汚れを疑ってレールのクリーニングを実施した。
■ レールをクリーニングしてみる
その結果を下に示すが、状態は何ら改善しなかった。 原因はほかにあるのだ。 グラフの時間軸を拡大して観察すrと、どうやら周期的な波形と判断でき、そのサイクルは、10秒間に18〜20回の山がカウントできるので、1.8〜2.0Hz の周期的な振動と判断する。 波の上は電源電圧よりの高く 8ボルトまであり、波の下は3ボルト程度で、全体的には凸凹している。 この凸凹が求める電圧変化とみるのだが、これだけ振動していたは、データとして信頼できないのである。
今までの結果より、実際の状態を測定しているとは思えないので、これは測定法の問題ではないか、あるいは、KATO 製のパワーパック特有のかも知れない。
 .
.
このような低い周波数の振動は、多くの場合は二つの波の僅かな周波数のズレによるうねり振動の例が多いので、近い周波数の現象をチェックしてみよう。
まず、無線基地で受信した走行中の動力車のデータは、 65〜 70msec で送られてくるので、このサイクルは 15.4〜14.3 Hz と換算される。 受信サイクルの4回毎のサイクルは、61.6〜57.2 Hz と計算される。
ここで電灯線の交流サイクルは 60 Hz であるが、受信サイクルの4回目と電灯線のサイクルの差は、2.8〜1.6 Hzとなり、このわずかな差がうなり現象となっているのでは無いかと想定するのであるが、果たして妥当だろうか?
もし、このようなうなり現象が原因とするならば、それを引き起こす犯人は電灯線の交流サイクル、即ちハムであり、KATO 製のパワーパックは、この交流成分を完全に除去できていないのでは無いかと疑うことが出来るのである。
この現象を解明するには、信号波形をオシロで観察するしか無いのであるが、本格的なオシロを持ち合わせていないのでそれを確認することが出来ないのだ。
■ 安定化電源を使用してみる
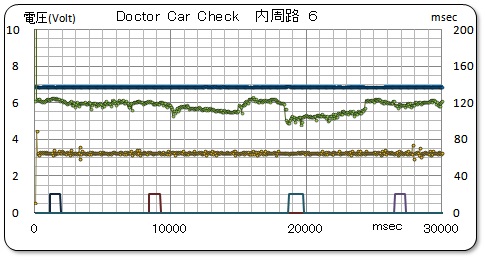
そこでやはり安定化電源を持ち出して、再測定を実施した。 その様子を下に示す。
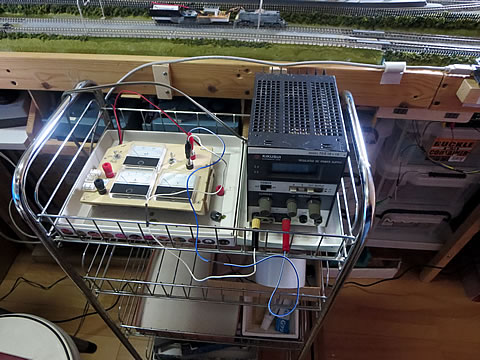
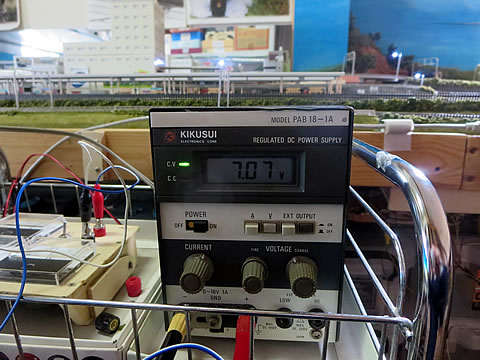
あちこちに電圧計があるので、その表示の様子を写してみた。 ほぼ7ボルトの状態であることが分かる。 Processing によってデータをファイルに落とし、その後EXCEL にてグラフ化したものを下に示す。 さすがに安定化電源であり、良質な直流電源によって正確と思われる電圧降下状態を測定出来ていると確信する。
 .
.
部分的に拡大したものを右に示すが、全く問題のないデータと判断できる。 このデータより
- 駅構内のポイント部分によって電圧降下が発生している。
- 3区にあるヤードの出入り口のポイントも電圧降下気味である。
- 1区と5区のトンネル内でも電圧降下が認められる。
- フレキブルレールを設置している区間はハンダ付けで接続しているので電圧降下は少ないようである。
などの様子が観察できた。 その恒久的な改善策は難しそうであるが、何か工夫しなければと思っている。
■ まとめ
XBee方式の無線機を搭載したドクターカーにより、レイアウトの保守状態を観察チェックすることは可能である事が分かった。 そして、不具合がどこにあるかもチェックすることが出来ると思っている。 また、測定時のパワーユニットはやはり安定化電源を使って、良質な直流電源による測定するのが一番ベストである。
なお、パワーユニットの種類によって、思惑通りの結果を得ることが出来ない恐れがある事も判明したので注意することにしよう。 そして測定準備には意外と手間がかかるので、もっと簡単に準備出来る工夫が必要であろう。
今後の検討デーマとして、いろいろなネタが考えられ、面白くなってきましたが、さて、何を取り上げるかは正月明けにゆっくりと考えることにして、今年の活動はここまでとします。
皆さん良いお年をお迎えください。
2016/12/27 作成