
HOME >> 鉄道模型実験室 > パワーユニットを知ろう PWM制御とコアレスモータ
鉄道模型実験室 No.135 パワーユニットを知ろう PWM制御とコアレスモータ.
 .
.
■ はじめに
パワーユニットを知ろう の第8弾として、TOMIX製パワーユニットN-1001-CL を使ってコアレスモータの特性を測定した。 PWM制御とコアレスモータは相性が悪いと言われていたが、測定データにも今までとは異なった様相を呈しており、その動きを理解するのに四苦八苦している。
■ 実験装置
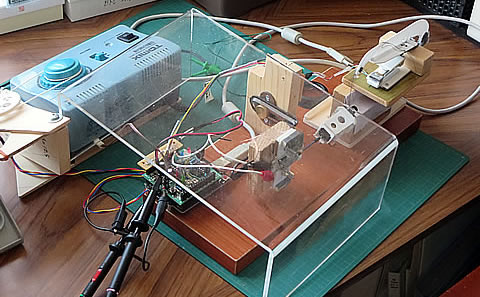
実験は先回報告の中で実施した時に測定しているが、トルクを測定する時にはモータと負荷装置をジョイントで連結している。 この連結状態が怪しいので、アクリルカバーで覆って測定している。 右の写真。 もし、ジョイント部が外れると高速回転故に小さな部品と言えども飛んできて怪我をするかも知れないのである。 安全第一である。
■ 測定データ
| パワーユニット | TOMIX製パワーユニットN-1001-CL |
|---|---|
| モータ | KATO製 C56-149 号機に搭載されていたφ7のコアレスモータ |
● 基本データ
まず最初に、基本となるグラフを示す。 今回、速度特性の横軸はパワーユニットのダイヤルの回転具合を目盛に見立ててパーセンテージで表示している。 これは、ダイヤルの回転と供給電圧が比例していないのでこのような変数を取り上げた。 何時もは無負荷状態しか測定しないが、今回は波形観察も兼ねて実施したので、負荷状態のデータを示す。
| 速度特性 | 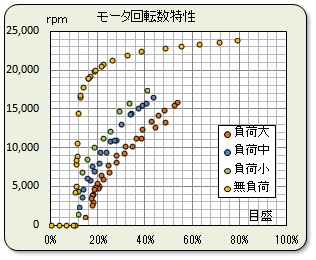 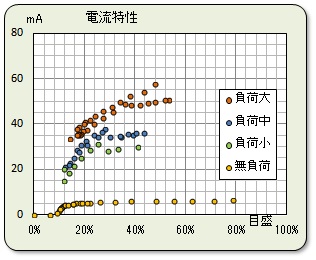 |
パラメータ: モータの負荷状態 |
|
| トルク特性 | 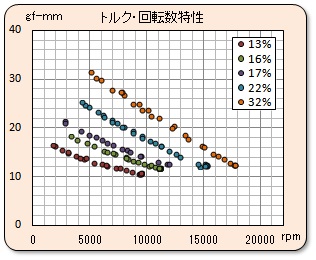 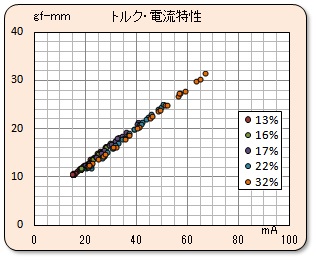 |
パラメータ: ダイヤルの回転量 |
今までの同じ傾向であると言えるのは、トルクと電流は比例するという関係だけで、回転数に関しては特徴的な動きをしている。
- 速度特性から見て、ユニットのダイヤルと回転数は比例せず、立ち上がりが急である。 このことは、ダイヤルを少し動かしただけで車両の速度はすぐさま速くなるということである。
- トルク特性からは、負荷に応じて速度変化大きい事が言える。 これは坂道になるとぐーど速度を落とし、下り坂になるとスピードが速くなることである。
● 安定化電源との比較
比較のために、良質な一定電圧の直流を提供する安定化電源から電力を供給した場合のデータを重ねてみる。 データは「モータ特性を測定しよう その11 コアレスモータ」のデータを転記したものである。 なお、安定化電源の場合は、ダイヤル目盛は計測していないが、ダイヤルの回し具合と供給電圧は比例するものとして、電圧からパーセンテージを計算してグラフに重ねた。
| 速度特性 | 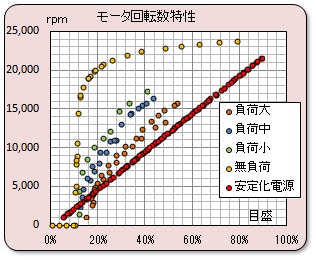 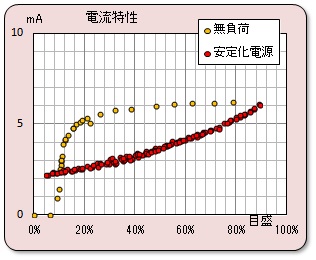 |
パラメータ: モータの負荷状態 |
|
| トルク特性 | 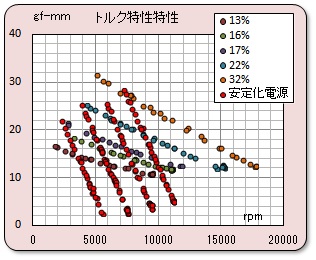 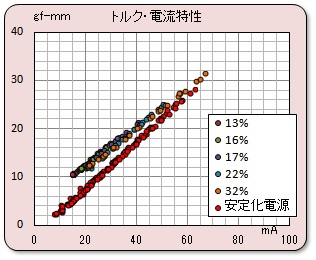 |
パラメータ: ダイヤルの回転量 |
電源の違いにより、これだけ特性のパターンが異なることが一目瞭然である。 コアレスモータの場合、PWM制御によって駆動されると、今までとは異なる動きを示すことが分かる。 トルクと電流は他の要素に影響されずに比例するものと思っていたが、二つの線に分かれてしまっている。 これはPWM制御の場合の電流値の測定方法の間問題と考えられる。 脈動のある電流の平均として測定した場合と、一定電流が流れている場合の値は、トルクとして表れる効果が異なってくると推察する。
ところで、目盛が小さいゾーンでの回転数の跳ね上がりはどうしてなのだろうか?
● 通常モータとの比較
今度は、モータの違いによる特性パターンの変化を見てみよう。 モータはKATO製のGM-5 型で、ジャンク品2として測定したデータを使用している。
| 速度特性 | 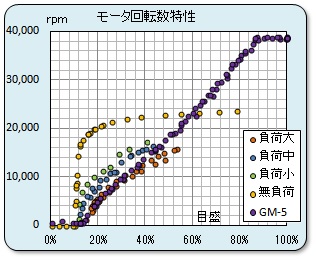 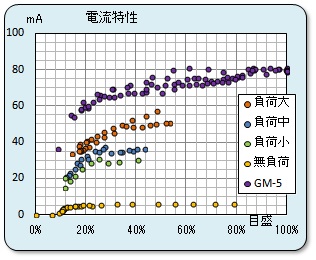 |
パラメータ: モータの負荷状態 |
|
| トルク特性 | 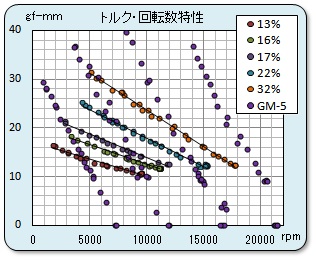 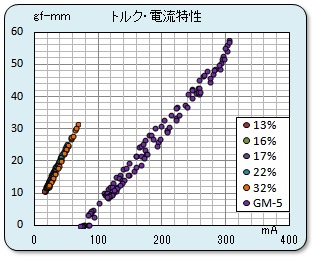 |
パラメータ: ダイヤルの回転量 |
■ まとめ
コアレスモータとPWM制御されたパワーユニットの組み合わせに於いて、大まかな傾向は把握できたが、なぜこのような結果になるのかは、これらのデータを眺めていてもなかなか理解できないのである。 同時に測定した電圧やデューティ比などのデータを交えていろいろ解析を実施しているが、その意味するところを理解すのが混乱していているので、まだ、まとめきれたいない。 そこで今回の報告はここでいったん区切りとしてまとめておく。
なお、コアレスモータとPWM制御されたパワーユニットの組み合わせに於ける特徴を再確認してまとめとする。
- ユニットのダイヤルと回転数は比例せず、立ち上がりが急である。 このことは、ダイヤルを少し動かしただけで車両の速度はすぐさま速くなるということである。
- ダイヤルを少し回しただけですぐにスピードが上がることは、従来の動力車のようなラピッドスタートとは異なっていることを理解してください。 従来のものはユニットのダイヤルをある程度回した時に、突然急発進するものである。 しかし、このコアレスモータとPWM制御の場合は、ゆっくりとした速度で動き始めることが出来る上に、ダイヤルを慎重に少しずつ回して行けばスムースな制御ができるという違いがあるのである。
- 負荷に応じて速度変化大きい事が言える。 これは坂道になると速度を落とし、下り坂になるとスピードが速くなることである。
次回は、データをもとに屁理屈を考えた内容を報告できるように頑張ります。
2017/2/3 作成