
HOME >> 鉄道模型実験室 > パワーユニットを知ろう PWM制御とコアレスモータ 波形観察
鉄道模型実験室 No.134 パワーユニットを知ろう PWM制御とコアレスモータ 波形観察 .
■ はじめに
パワーユニットを知ろう の第7弾として、TOMIX製パワーユニットN-1001-CL を使って、コアレスモータを駆動してみた。 PWM制御とコアレスモータは相性が悪いと言われていたが、実際にはどうなのかを波形観察から見てみることにしょう。
■ 実験装置
何時もの実験装置を使って、波形を観察した。 パワーユニットは、「TOMIXのパワーユニット N-1001-CL」で使用したTOMIX製パワーユニットN-1001-CL である。

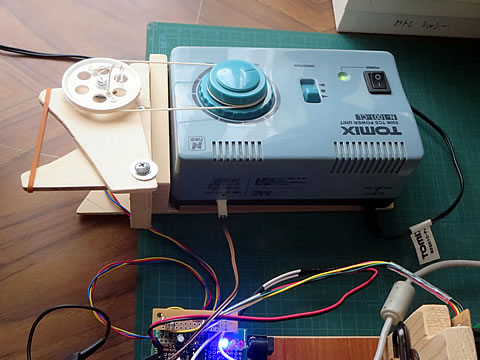
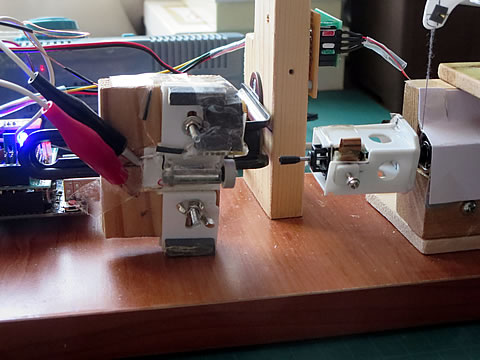
また、使用したモータ は、KATO製 C56-149号機のコアレスモータを取り出し、「モータ特性を測定しよう その11 コアレスモータ」で使用した測定装置にセットした。
 .
.
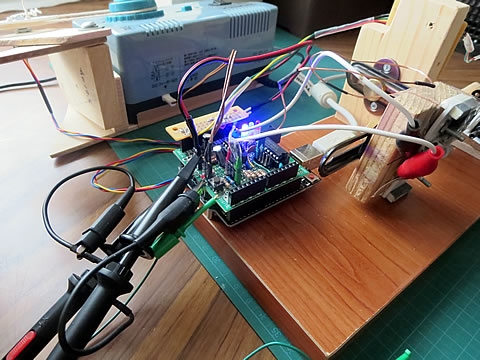
さらに、パワーユニットと測定部の間の配線は出来るだけ短くするようにして、オシロのプローブも上右の写真の様にArduino 端子に部分にセットした。
■波形の観察結果
モータの速度特性を測定しながら、オシロ波形も保存して行った。
測定は、パワーユニットのダイヤル位置(目盛)、モータ端子電圧、電流、モータ回転数、モータトルクを測定した。 今までは、この速度特性ではモータの回転軸を開放した無負荷状態だけを測定していたが、波形を観察するために負荷を与えた状態でも実施した。
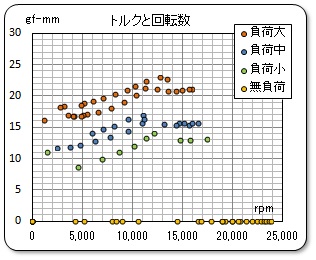
しかし、負荷装置は速度によって値が変化するので、一定の負荷状態を設定するのが困難であり、大まかな条件設定であることで許してもらおう。 ちなみに回転数に対するトルクの状態を右のグラフに示す。
下に示すオシロ画面は、各負荷状態毎に測定データから読み取ったダイヤルの目盛位置より画像を選別して一覧表としてまとめたものである。
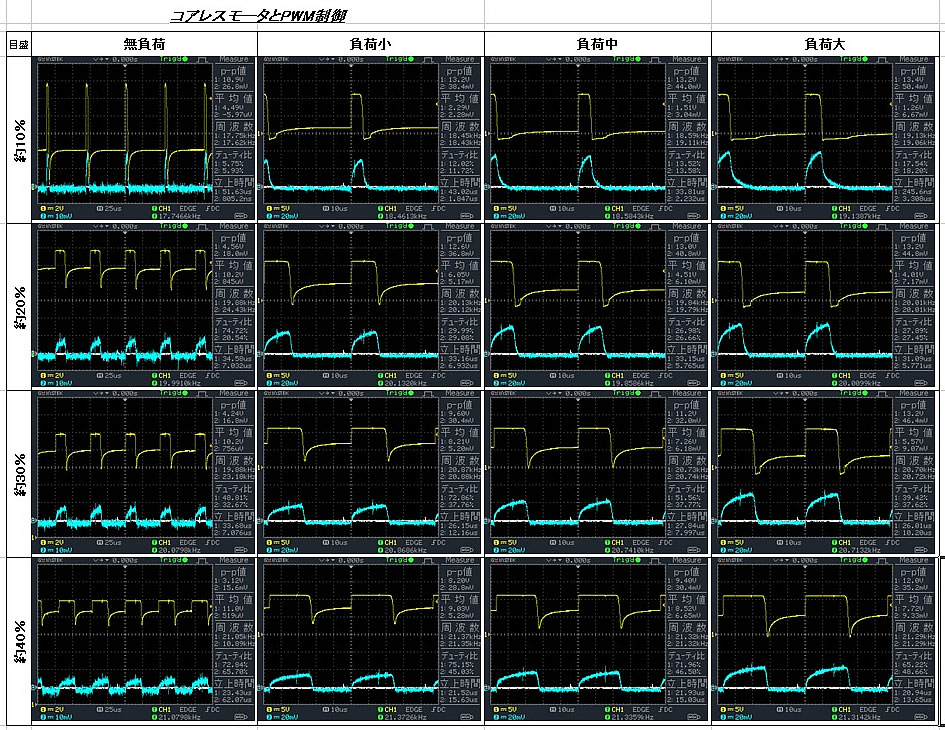
拡大図 ⇒ PDFファイル
先回は同じタイプのパワーユニットにて通常のDCマグネットモータを観察したオシロ画面を報告した。 「パワーユニットを知ろう 電圧と電流の波形」 この時の波形と比較することによって、コアレスモータの場合の特徴を知ることが出来るはずである。
■ 考察
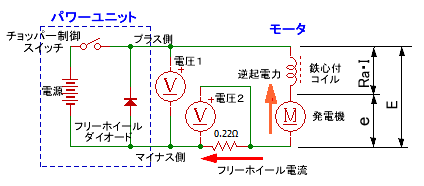
通常のモータとコアレスモータの違いを理解するために、今回の測定回路を理解しておこう。 簡略化した回路図を右に示す。 PWM制御のパワーユニットは電源から供給される電気をチョッパー制御するスイッチによってON/OFF され、そのON時の幅を変化させることによって、供給される電力を制御している。 そして、OFF時に発生する衝撃的電力を逃がすためにフリーホイールダイオードが設定されている。
DCモータは回転ロータがあり、それは鉄芯付のコイルであり、磁界の中を回転するためにフレミングの法則に従って逆起電力が発生する発電機でもある。 この時、コイルに流れる電流 I (A) によって、コイル抵抗 Ra (Ω) とよる電圧降下 Ra・I (volt) が発生し、回転するロータによる逆起電力 e (volt) も発生している。 そして、モータ端子の電圧 E (volt) は、この二つの電圧の和と釣り合っているのである。 即ち、![]() である。
である。
電圧と電流の計測は、パワーユニットとモータの間で実施しており、電圧はパワーユニットのプラス側とマイナス側で、電流はマイナス側に設けたシャント抵抗の電圧降下量を計測している。 Arduino による計測では、ノイズを避けるために大きな平滑回路を通してしるので、平均化された値を計測している。 そして、オシロでは、プラス側の電圧をチャンネル1に(黄色で表示)、シャント抵抗の上流の電圧をチャネル2に(青色で表示)表示させた。 また、波形表示は平均8回の測定を平均化して表示する設定にしており、プローブのまいなす
● 通常モータとコアレスモータの比較
実際のオシロ画面を比較すると、電圧波形と電流波形共に異なっていることが一目瞭然である。
- 通常モータでの電圧波形は、綺麗な矩形波であり、OFF時はマイナス電圧となっている。
- コアレスモータでの電圧波形は、OFF時の電圧が変化している。
- 通常モータでの電流波形は、三角波のけいじょうである。
- コアレスモータでの電流波形は、OFF時ゼロの状態である。
ある同じ状態のときの波形を比較してみた。
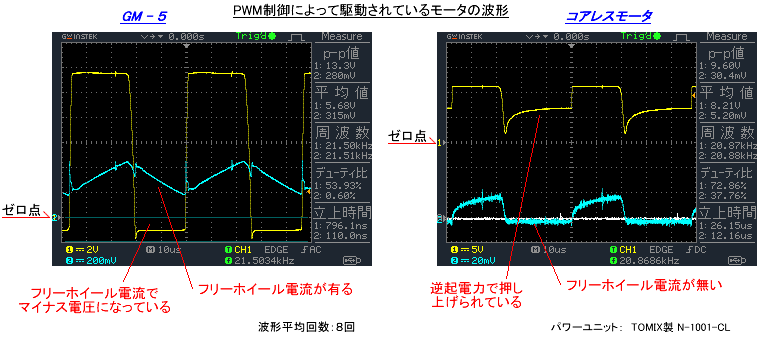
波形の観察結果より、一番の違いは、フリーホイール電流が流れているか流れていないかの違いでは無いかと考えれる。 フリーホイール電流はコイルに流れている電気を急激に遮断した時に発生すると考えると、ここに現れた現象が説明できる。
- PWM制御パワーユニットはチョッパー制御なので、急激な遮断状態が発生するので、フリーホイール電流が流れる。
- 通常モータは強力な鉄芯を有するコイルであり、コアレスモータはその鉄芯が無い構造のである。 このため、通常モータの場合は大きなフリーホイール電流が流れ、コアレスモータは僅かしか流れない。
- フリーホイールダイオードのフォワード電圧は、およそ1ボルト程度あると考えると、通常モータの場合に大きなフリーホイール電流が流れると、マイナス側とプラス側との間に電圧差が生じ、プラス側がおよそ1ボルト低下する。 測定中はマイナス側をゼロ点しているので、プラス側はマイナス1ボルトを表示する。
- コアレスモータは僅かしかフリーホイール電流が流れないので、このフリーホイールダイオードのフォワード電圧を超えることが出来ないので、電流は循環することが出来ない。
- チョッパー制御によって電力がOFFの場合でフリーホイール電流が流れない時、プラス側の電圧はモータの逆起電力のよって電圧が発生する。 ただし、回路は閉鎖されているので電流は流れることが出来ない状態である。
- コアレスモータの場合のOFFの電圧波形は、僅かなフリーホイール電流と逆起電力の関係で構成された波形と思われる。
- 通常モータの場合、電力OFFの状態ではコイルで発生する大きなフリーホイール電流により、電流の流れは途切れない。
- コアレスモータの場合、電力OFFの状態では発生するフリーホイール電流は小さいため、逆起電力の影響が大きく出る。
● 逆起電力の確認
供給電力がOFFの場合の電圧は、逆起電圧を示していると考えられるので、オシロ画面をモータ回転数に合わせて整理し直した。
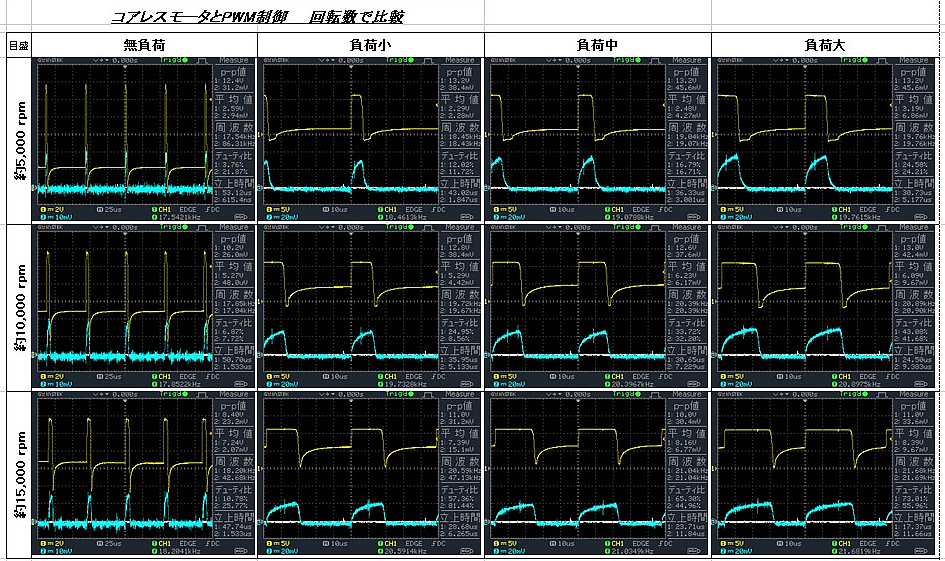
(注記) チャネル1の表示は、無負荷の場合は、ひと目盛 2V で、他は 5V で表示しているので注意してください。
オシロ画面より、電力がOFFの場合の電圧を読みとってみる。 回転数が約 5,000rpm の場合は約 2V、約 10,000rpm の場合は約 5V、約 15,000rpm の場合は約 6.5V、であり、負荷によって変化していないことが読み取れる。 即ち、この電圧は回転数に関係しており、ほぼ比例しているように思われる。 これは逆起電圧であることを示唆していると考えられる。
■ まとめ
相性が悪いと言われていたPWM制御によるパワーユニットとコアレスモータの組み合わについて、その電圧と電流波形を観察した結果、通常モータとは異なる波形が観察された。
通常モータの回転ロータは、機械的な慣性を持っていると同時に、強力な鉄芯を有するコイルでもあるので、電気的な流れの慣性も有している。 このため、激しいON/OFF 制御を繰り返すチョッパー制御に於いても、連続的な制御の場合と同様な制御特性を呈するものと考えられる。 通常モータとPWM制御のパワーユニットの組み合わせでは、問題ないものと判断できる。
一方、コアレスモータの場合は、この様な機械的、そして電気的な慣性が期待できないため、連続的な制御の場合とは異なった特性を示すものと思われる。 そこで、次回は、モータとしての速度特性とトルク特性を整理してみよう。
2017/1/31 作成