
HOME >> 鉄道模型工学 測定装置の製作 測定の自動化 測定の実施
測定装置の製作 測定の自動化 測定の実施
■ 測定の実施
測定装置が完成したので、いよいよ測定を開始する。
◆ 測定の準備と手順
最初にレールの汚れやテスト車両のクリーニングを実施して、綺麗な状態で測定を開始する。 次に、テスト車両の重量を秤で測定する。 なお、自分が使用している秤は、エー・アンド・ディ製の Compact Scale HJ-150 で、軽量範囲は、0.2g 〜150g あり、最小表示は 0.1g 、取引・証明以外用である。 使い易いので愛用している。 下左の写真。


次に、牽引力測定用の重り車両の重量と走行抵抗を測定しておき、これらの値をExcel の所定欄に入力しておく。 傾斜台の初期値も入力する。 そして、傾斜台を水平状態にして車両を走行させながらコントローラのダイヤルを調整し、慣らし運転を実施しする。 上右の写真。 走行に異常がなければ測定を開始する。
● 速度特性の測定
測定対象の動力車のみで水平にした測定台を走らせる。 単機平坦路の走行状態である。 準備で出来たら、Excel をスタートさせ、測定開始のボタンを押する。 車両が車速測定ゲートを通過するたびに、Arduino からデータが送信されるので、Excel は一行毎に入力し、計算されたデータをグラフに表示していく。 そして設定電圧を上下に変更させて低速から高速までのデータを収集する。 データはリアルタイムに表示されるので出来るなら間を埋めて行くように電圧を設定していくと綺麗なデータを収集することが出来る。
● 牽引力特性の測定
テスト車両に重り車両を牽引させて測定するが、動力車の牽引力に応じて何種類かの重り車両を準備しておくと良いであろう。 自分は、Bトレ用の 30 グラムから重量級機関車用の126グラムまでの6種類の重り車両を準備している。 電源として模型用のコントローラを使用している場合には、負荷によって電圧が変動するので測定データのグラフ表示におけるパラメータ表示が困難となる。 このため、電源としては安定化電源が望ましい。 電圧を設定後測定を開始するが、車両が一周する毎に、登坂と降坂でのデータを送信して来るので、これに合わせてリフト機構により傾斜を上げて行く。 操作は、表示されたグラフを見ながら、リフト装置のレバーを回転させるだけで良いのである。
勾配が急になり、登坂を登れなくなった場合には傾斜台の下側を持ち上げて傾斜を緩くして坂の上まで走行させ、降坂に入ると元に戻して降坂そ走行させる。 台を持ち上げた場合はキャンセルスイッチの信号が傾斜角の異常値として表示されるので、データ整理の段階でネグレクトすればよいのである。
一つの電圧パラメータの測定が完了すると、電圧を変えて測定する。
● 測定後のデータ整理
測定後は、車両のデータや測定日時などを追記して記録しておく。 特にグラフのタイトル部分の表記変更を忘れてしまうことが多いのである。
そして、グラフのプロット点を参考にしながら、測定データの抜けや異常点は、測定失敗データとしてネグレクトしていく。 これは、許される場合と許されない場合があるが、測定装置の信頼度の問題とみて、発生した異常データは躊躇なく表示対象外としている。 計算欄の計算式を消してしまえば簡単にネグレクトできるが、送信されてきた生データは残す様にしている。 計算式を復活させればデータを再表示させることが出来るからである。
■ 測定データの例
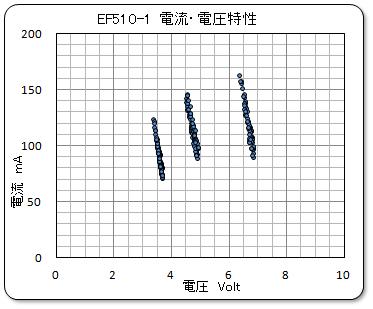
供試車両 EF510-1号機の場合のデータを紹介する。 まず速度特性の結果を示す
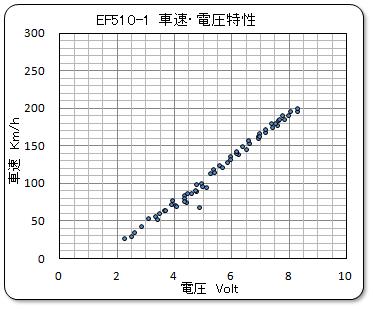
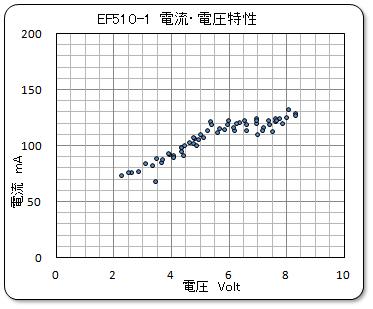
測定データは意外とバラツイており、電流値も 6Volt 以降で傾きが変化している。 この傾向は、以前調査したデータとも合致している。 これはこの車両特有の現象であり、構造上の問題とも考えれる。 また、途中で飛び出している異常データもあるが、原因不明である。 失敗データとして消しても良いであろう。
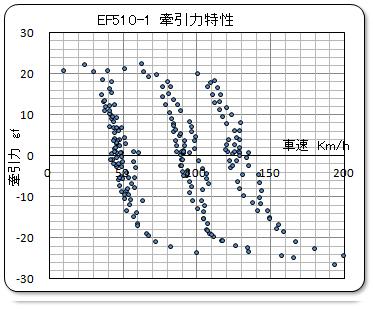
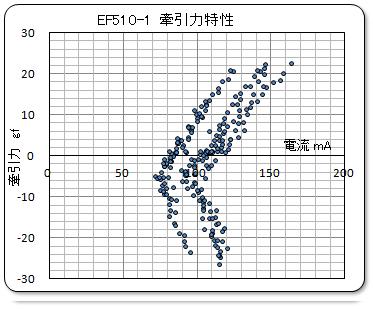
次に、牽引力特性を計測した。
.
● 感じた事
このデータを見て、自分は少しがっかりとしている。 ご覧のとおり牽引特性のデータは大いにバラツイテいる。 もっと綺麗なデータが取れると思っていたのだ。
以前より、自分は Nゲージの鉄道模型車両は精密機器では無い と思っている。 精密機器とは、その作動に信頼性があり、どんな場合でも正確にかつ安定的に作動するものである。 例えが時計がそうである。 一年間で1秒も狂わないという時計も珍しくない。 オリンピック競技などで使用されるストップウォッチでも、誰が何処で測ってもその計測された時間の値を、皆が信頼している。 ロケットなどの大きな装置でも、狙った軌道に正確に乗せる事ができるのである。 このような機器を精密機器と呼ぶべきである。
これに対して、鉄道模型はどうだろうか? 確かに小さく緻密に作られており、一見して精密機器のようであるが、緻密に作られているだけで、その性能は測定するたびに変化するし、ギクシャクと走行する場合もある。 これは精密機器としては失格である。
しかし、もともと、 精密機器として使用する事を前提としていないので、これで充分なのである。 鉄道模型は緻密さをセールスポイントにし、正確さは求められていないのである。 メーカーが模型車両の性能を発表しないのも当然であり、このような鉄道模型に対して、動力特性を測定しようとしている小生が無謀なのかもしれない。
************ 牽引力特性の測定 (2013/3/20) を再編集 ********
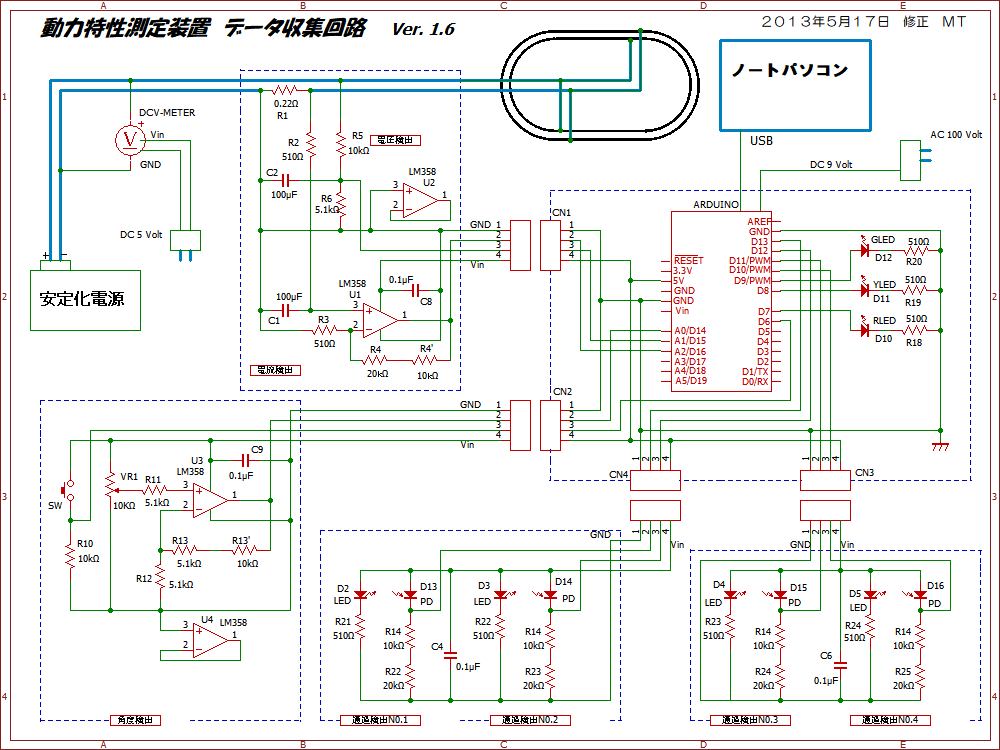
■ 回路のチェック
動力特性の測定の自動化は、なんとか完成する事が出来た。 測定回路は、素人が手探りで製作したものの、目的とする動作は確保する事が出来ている。 改善を要する点は、時々データが飛んでしまうことであるが要因がよく分からないので、欠損データとして取扱っている。
また、書店で興味本位で「トランジスタ技術 2013年4月号」をぱらぱら見ていると、電子回路の見方・読み方・作り方の特集が目に入った。 そして、「ビギナのための電子回路チェックリスト」のページで釘付けとなったしまった。 そしてそのまま、会計に足を運んでしまった。 この雑誌に記載されている内容にもとずいて、回路をチェックした。 特に、使っていないOPアンプの空き端子の処理はしてありますか?のチェックに対してさっそく追加処置を実行した。
最終的に修正された回路図を下に示す。
■ おわりに
興味から始めた動力特性の自動測定について、そのシステムを一応は完成することが出来た。 面倒な測定作業は大幅に簡素化され、その測定精度も満足のいくものであり、当初の目標は達成できたと考えている。 今後はこのシステムを使用して、多くの動力車の特性を調査していきたい。 その中で、改善点を見つけ、さらに使いやすいシステムを目指して行こう。
そして Arduino と簡単な電子回路の取り扱いを習得することが出来たことが、何よりも嬉しいことである。 メカ屋の自分でも出来る事を知り、今後のホビーの幅を広げて行きたい。 模型の自動運転! 自動踏切だって? ・・・・・・・・・・・・・ニーズを感じたら手を出すかも知れません。
************ 回路の修正 (2013/5/24) を再編集 ********