
HOME >> 鉄道模型工学 > 動力特性の測定の自動化 > 回路の修正
鉄道模型工学 動力特性の測定の自動化 回路の修正
■ いきさつ
動力特性の測定の自動化は、なんとか完成する事が出来た。 測定回路は、素人が手探りで製作したものの、目的とする動作は確保する事が出来ている。 改善を要する点は、時々データが飛んでしまうこと、電源の電圧が不安定であること、などである。
少し前、書店で興味本位で「トランジスタ技術 2013年4月号」をぱらぱら見ていると、電子回路の見方・読み方・作り方の特集が目に入った。 そして、「ビギナのための電子回路チェックリスト」のページで釘付けとなったしまった。 そしてそのまま、会計に足を運んでしまった。
この雑誌に記載されているOPアンプの使い方のチェックリストをもとに、今回製作した電子回路を手直ししたので、ここに報告する。
■ チェック項目とその対応
- チェック 1) 電源にデカップリング・コンデンサは入っていますか?
- ノイズ対策として、0.1μFのコンデンサを使うことは知っていましたが、設置する場所はあまり気にしていませんでした。 ノイズを減らしたいと言うことで、出力側にも入れてインしたが、OPアンプの電源側に入れ、マイコンなどからのクロックによるノイズを防止するのが目的ですので、位置を見直しました。
- チェック2) アナログGNDはディjジタルGNDと分離、1点アースになっていますか?
- OPアンプとマイコンは別ボードにしているため、直接的には関係しないと思っていますが、GNDて何だろう?と思ってしまいました。 アース線を設けているわけではないので、何処がGNDなのだろうか? Arduinoへ電源を供給しているACアダプタのマイナス側をGNDと考えられます。 一方で、
動力車用の電源の電圧と電流を測定するために、電源ラインのプラスとマイナスに回路は接続しています。 ここではマイナス側をGNDとして考えるのでしょうか。 この辺は深く考えずにGNDと思って接続しています。 でもこのラインは何処につながっているのだろうか? 家庭用のコンセントなのだろうか? コンセント口の長い方がアースされている側と聞いています。 昔のアンプでは、コンセントにも方向性があるので、差し込む時に注意せよと言われていましたが、最近の機器ではその表示がありません。 ACアダプタやコントローラのGNDはあるのだろうか? こういった疑問のままで使用しています。
- チェック3) GNDレベルの信号入力が出来るOPを選定していますか?
- 単電源用の358タイプを使用しているので、ゼロレベルは大丈夫と考えているし、また、ゼロ点を測定する必要のある角度測定は、可変ボリュームのゼロ点を嫌ってゲタを履かせているので、まず大丈夫と判断する。
- チェック4) OPアンプの出力電圧範囲はA-Dコンバータの入力電圧範囲と合っていますか?
- 当初は、OPアンプの電源電圧までフルに使えると思っていましたが、センサの較正中に 3.7ボルトで頭打ちになることに気が付き、このことを実感しています。 OPアンプの増幅率を見直せばいい事ですが、今のところ、測定範囲に困ってはいないため、面倒なのでそのまま使用している。
- チェック5) よく使う単電源OPアンプ358は出力端子に流れ込み電流があると0Vを出力できない。
- 説明内容が良く理解出来ないが、傾斜角ゼロの場合でも電圧はゼロにしていないので(ゼロ点にゲタを履かせている)問題なさそうである。 また、角度値とAD変換出力値の較正データでもチェックしているので大丈夫と判断する。
- チェック6) 入力オフセット電圧による誤差を考慮していますか?
- 電圧や電流などの物理量とAD変換出力ごの値とは、実測により較正し、EXCELのグラフから関係式を求めています。 今までの例では、綺麗に直線性が得られており、この較正値を使用することによって、入力オフセット電圧の問題もクリアされていると考えています。 もっとも、較正値はその基準としている電圧や電流を測定したテスターの精度に全面的に依存しているため、元が狂っておればそれまでですが、ホビーの範疇として許容出来ると判断しています。 また、速度計測に関しては、基準とする計測器の精度よりも、光センサの2点間の距離測定と、マイコンの時間計測精度を比べるとどっこいどっこいと考えて、EXCEL上での計算によってデータを求めています。
- チェック7) センサ信号のスピードはスルーレート以下になっていますか?
- 周波数応答のことと理解していますが、電流値の入力は、容量の大きいコンデンサを使用するなどデータを平滑化するのに苦労している状態であるため、周波数によってゲインが変化するかも知れないが、問題ないものと思っています。 また、速度測定センサはOPアンプを使用していないが、応答の遅れは、二つの通過センサとも、同じ構成にしているため、応答遅れなども殆んど同じになると考えれば、計測精度に影響しないと思っています。
- チェック8) 配線容量は考慮しましたか?
- OPアンプの出力に容量性の負荷が接続されると、位相余裕がなくなり発振するとのこと。 なにも考えずに、ただノイズを減らしたいとして出力側に 0.1μFのコンデンサを付けた個所があり、あさはかな考えだと反省しています。
- チェック9) 消費電力による発熱は考慮していますか?
- マイコンの出力側は、LEDのみのため、まず問題無いと判断する。
- チェック10) 使っていないOPアンプの空き端子の処理はしてありますか?
- これは実施していませんでした。 さっそく追加処置をすることにします。
- チェック11) 入力信号のレベルは電源電圧以下、GND以上になっていますか?
- この内容は、気にしていたのですが安全対策は実施していません。 入力や出力の保護ダイオードはよく解らなかったので使用していません。 ただ、コントローラはその出力電圧に注意して使用すること、逆転スイッチは使用しない事(コントローラのスイッチにテープを張っている)程度の安全対策である。
- チェック12) 誘導負荷によって出力端子が電源電圧以上、GND以下に振られていませんか?
- 説明内容が良く理解出来ないので、なんの対応をしていません。
■ 基板の手直し
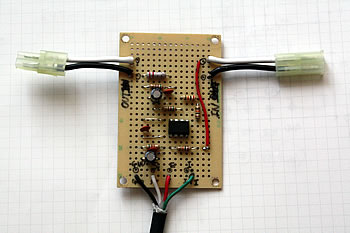
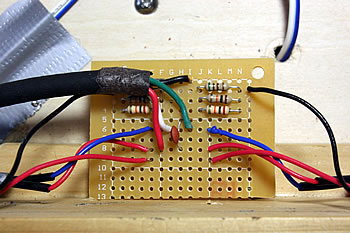
上記の内容に従って、基板の手直しを実施した。 修正後の基板の写真を下に示します。 ハンダ付けは素人の領域のままであるため、見難い状態である。 機能している様子なので、これでOKとしています。
電圧値と電流値の検出ボード:
◆ 使っていないOPアンプの空き端子の処理 |
 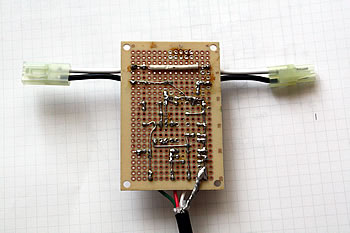 |
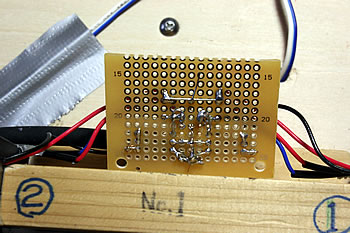
傾斜角度検出ボード:
◆ 使っていないOPアンプの空き端子の処理 ◆ 0.1μFのコンデンサの設置位置を変更 |
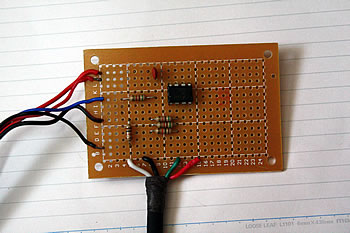 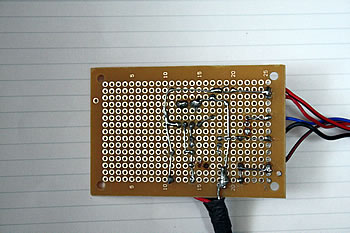 |
車両通過検出ボード:
◆ 0.1μFのコンデンサの設置位置を変更 |
  |
|
修正した回路図:
修正された最終的の状態を回路図として仕上げています。 |
 拡大図 拡大図 |
■ おわりに
上記の対策を実施して、C50 の動力測定を実施してみた。 自動測定システムは異常なく動作していたが、時々発生しているデータ飛びは、改善されていなかった。 このため、今回の修正が効果が有ったのかどうか不明であるが、先人の知恵を参考にさせてもらったと言うことで、充分に満足している。
![]()