
HOME >> 鉄道模型工学 > 測定項目の追加 測定台の改造
鉄道模型工学 測定項目の追加 測定台の改造.
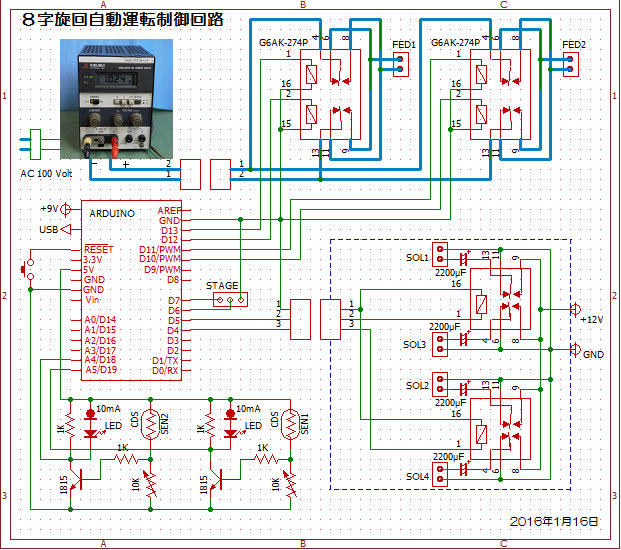
走行中の動力車のモータ端子電圧とモータ回転数を測定すべく、有線方式による測定装置の開発を進めている。 この方式では8字型レイアウトを、リバース運転を含む左回りと右周りの交互運転が必修であり、そのための自動運行システムが必要となった。 このため、ミニレイアウトを構成してシステムのテストを実施した結果、順調に運行出来たので、いよいよ装置の改造と製作に入った。
■ 自動運転用の制御シールドの製作
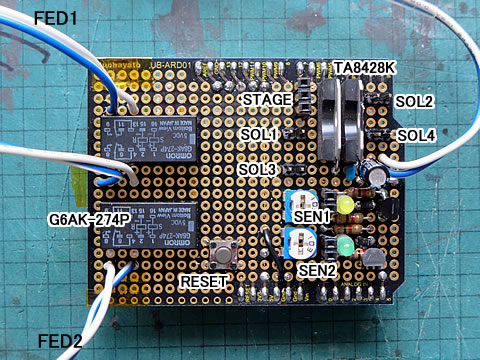
ミニレイアウトでのテスト結果より、自動運転用の制御シールドの製作から始めた。 サンハヤト製のArduino用ユニバーサル基盤 UB-ARD01 を使用し、給電切換用のリレーは、OMRON 製の2巻線型小型ラッチングリレー G6AK-274P-DC5V を使い、 ポイント切換制御は東芝製DCモータ用フルブリッジドライバーTA8428K(S) を使用した。 何度も実態配線図をグラフ用紙の上に書いては検討した結果、下の様な配線とした。 センサ部やドライバ部、およびリレー部はそれぞれなるべく離すように配置したつもりである。 特にセンサー部はコンパクトにまとめることが出来た。 10mA用のCRDはチップ型を持っていたので早速使用した。 リレー回路の裏側には、Arduino 本体のUSB コネクタ部との接触を恐れてカプトンテープを張ってシールしている。
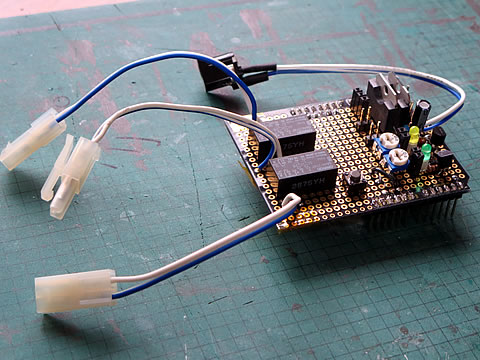
フィーダー線との接続は、KATOのコネクタを利用し、12volt電源はDCジャックを使ってACアダプターと接続するようにしている。
************ 制御回路用のシールドを作る (2016/1/18) を再編集 ********
■ 測定台の改造
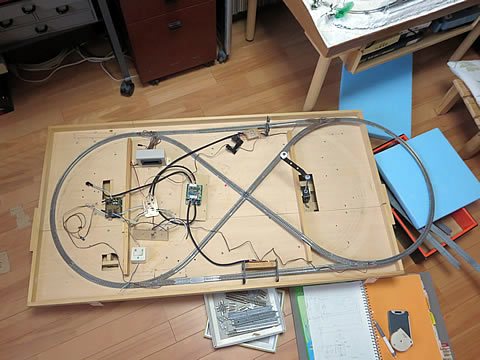
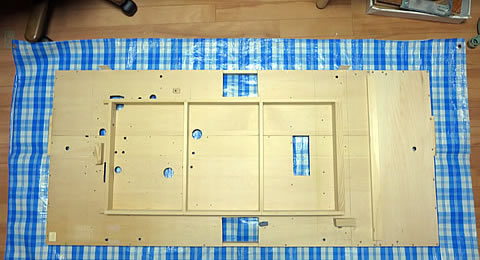
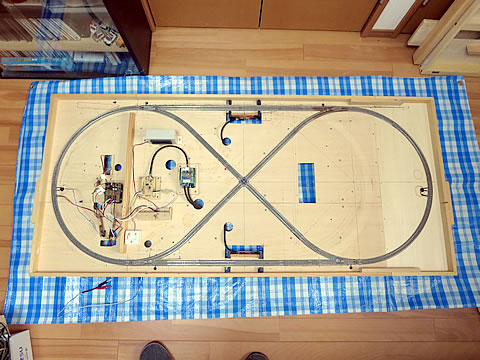
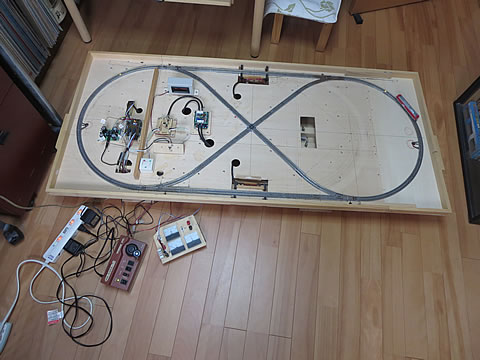
線路配置の変更のために測定台を改造した。 線路は、今までのTOMIX製のカーブレール C280-45(F) を使い、電動ポイントN-PR280-30(F) 、N-PL280-30(F) 、 カーブレールC280-15(F)、クロッシングレールX37-90(F)、その他歯数レールを使って構成した。 現在の測定台に載せてみた状態をを下左の写真に示す。 右側を少し延長しなければならない事が分かる。 その改造工作をした状態を下右に示す。

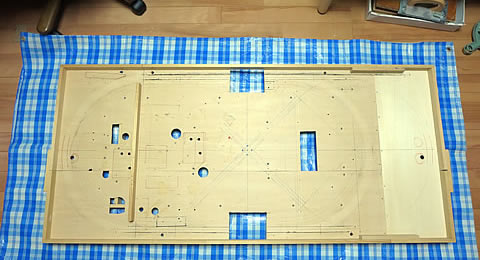
その他に、測定ゲートの埋込のための穴や、必要な配線のための穴などを追加した状態を下に示す。 左の写真が測定台の表側で、右の写真が裏側である。
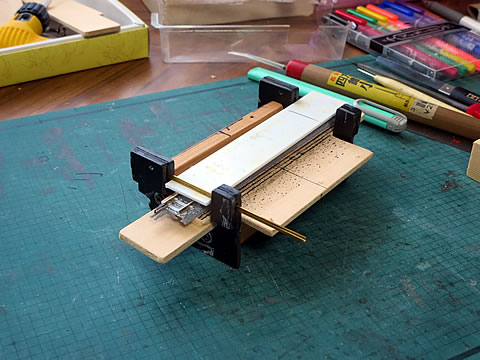
次に測定ゲートの改造を説明する。 走行する車両からはセンサの電線が伸びているので、ゲートの上面は開いた状態でないと通過できない。 このため、今までの測定ゲートの上下をひっくり返して測定台に取り付けた。 工作途中と取り付け後の状態を下に示す。
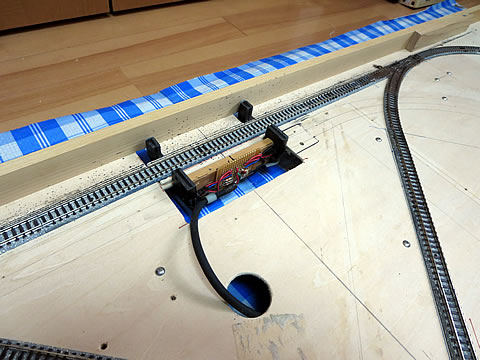
先回カーブの中央部には通過センサーと給電部を工作した。 その線路と取り付け状態を下に示す。


今までの機器に加えて、上記の新しく工作した機器の配置状態を下に示す。 そして、各機器は測定台に直接取り付けるのでは無くて間にベニヤ板を噛ませて取り付けている。 これは装置の脱着が表から出来るように工夫した。
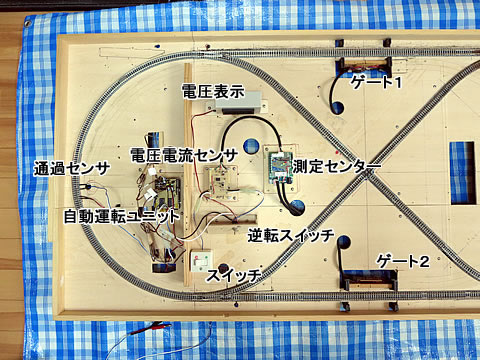
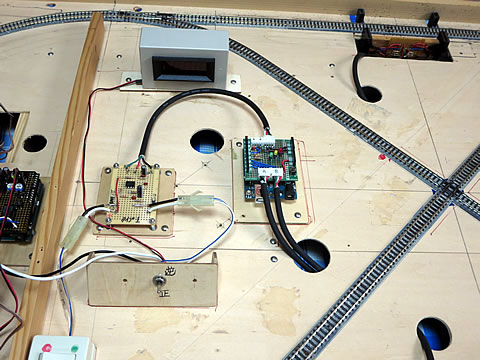
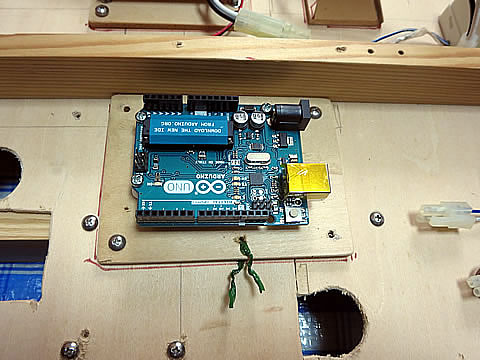
新しく追加した自動運転用のArduino を設置し、その上に制御シールドを重ねている。
****** Autodrive-1 *****************
#define FED11 13
#define FED12 12
#define FED21 11
#define FED22 10
#define SOL1 2 //D5→D2
#define SOL2 3 //D4→D3
#define SEN1 19
#define SEN2 18
#define STAGER 7
#define STAGEL 6
void setup() {
pinMode(FED11,OUTPUT);
pinMode(FED12,OUTPUT);
pinMode(FED21,OUTPUT);
pinMode(FED22,OUTPUT);
pinMode(SOL1,OUTPUT);
pinMode(SOL2,OUTPUT);
pinMode(STAGER,OUTPUT);
pinMode(STAGEL,OUTPUT);
pinMode(SEN1,INPUT);
pinMode(SEN2,INPUT);
digitalWrite(FED11,LOW);
digitalWrite(FED12,LOW);
digitalWrite(FED21,LOW);
digitalWrite(FED22,LOW);
digitalWrite(SOL1,LOW);
digitalWrite(SOL2,LOW);
digitalWrite(STAGER, HIGH);
digitalWrite(STAGEL, LOW);
delay (500);
digitalWrite(SOL1,HIGH);
delay (500);
digitalWrite(SOL1,LOW);
delay (500);
digitalWrite(SOL2,HIGH);
delay (500);
digitalWrite(SOL2,LOW);
delay (500);
digitalWrite(FED11,HIGH);
digitalWrite(FED21,HIGH);
delay (500);
digitalWrite(FED11,LOW);
digitalWrite(FED21,LOW);
}
void loop() {
while (1){
if(digitalRead(SEN2) == HIGH) break;
}
while (1){
if(digitalRead(SEN1) == HIGH) break;
}
digitalWrite(STAGER, LOW);
digitalWrite(SOL1, HIGH);
delay (200);
digitalWrite(FED22, HIGH);
delay (200);
digitalWrite(FED22, LOW);
while (1){
if(digitalRead(SEN2) == HIGH) break;
}
digitalWrite(FED12, HIGH);
delay (200);
digitalWrite(FED12, LOW);
delay (200);
digitalWrite(SOL1, LOW);
digitalWrite(STAGEL, HIGH);
while (1){
if(digitalRead(SEN1) == HIGH) break;
}
while (1){
if(digitalRead(SEN2) == HIGH) break;
}
digitalWrite(STAGEL, LOW);
digitalWrite(SOL2, HIGH);
delay (200);
digitalWrite(FED11, HIGH);
delay (200);
digitalWrite(FED11, LOW);
while (1){
if(digitalRead(SEN1) == HIGH) break;
}
digitalWrite(FED21, HIGH);
delay (200);
digitalWrite(FED21, LOW);
delay (200);
digitalWrite(SOL2, LOW);
digitalWrite(STAGER, HIGH);
}
■ 作動テストの実施
傾斜角センサ以外は、一応配線出来た状態を下左に示す。 そして、自動運転制御ユニットのArduino にポート位置などを修正したスケッチを送信し、 モータドライバIC用の12V電源を接続して機能テストを実施した。
その結果は見事に NG であった。 4個の電動ポイントの内、1個しか作動しないのである。 他の3個はダンマリであったり、ジーと音はするものの切り替わらないである。 センサ部に手をかざすと、センサ表示用LEDは消灯して反応し、制御ステップが進行している事は確認されたが、電動ポイントの作動は No.3 のポイントのみ反応するのみであった。
そこで確認のために、TOMIXのパワーユニットを使って、電動ポイントの動作確認を実施した。 結果は、元気良く切り替わり、あたかも 「僕たちは元気いっぱいですよ」 と言わんばかりに カシャ カシャ と反応してくれた。
問題は自動運転制御ユニット側にあることがはっきりした。
ウ・・・・・・・・・・・・! やはり心配が当たってしまった!
************ 木工工作の実施 (2016/1/20) を再編集 ********
■ 電動ポイントの駆動方法の変更
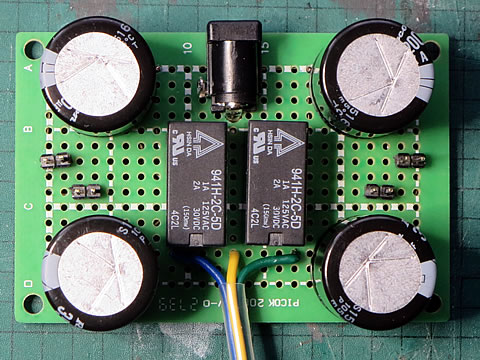
そこで躊躇なく準備していたコンデンサ方式に乗り換えることにした。 リレーは、HSIN DA 製の5V小型リレー2回路C接点の941H - 2C - 5D である。 コイル抵抗が167Ω、通常電流が30mA のので、この電流ならArduino のデジタル出力端子の容量以内と判断して、通電時間が有る程度長くても使用できると考えた。 そして、定位はOFFの状態とし、反位でON状態として使用すれば、通電時間は短く済むし、ON/OFF のみのリレーでも使用できると考えてこのタイプを選定した。
また、接点が一つのタイプでもよかったのであるが、二つのポイントを同時に駆動するためには、2接点のリレーを使ってそれぞれにコンデンサを接続し、別々に駆動すのが確実と考えたのである。 今回は安全策を採用した。
カタログによると、コイルを駆動する端子に、極性が指定されていなかった。 プラス・マイナスどちらにつないでも良いと言う事と解釈した。 供給電源回路に使用したOMRON製のリレーでは、コイル極性に注意してくださいと注記があったが、今回の HSIN DA 製とは構造が異なるようであり、コイルに通電すればONとなるタイプと想定する。 ただ、価格については、注文した先が異なるものの、\700.- と \100.- であったのには驚きである。 構造の違い? メーカーの違い? 取扱先の違い・・・・・・・・・・・? でも使用目的が異なるので、高価であっても納得している。
コンデンサは、φ18×20mm で 2200μFの電解コンデンサを使用し、72×48mmの片面ユニバーサル基板に回路を構成した。 大きなコンデンサをどこに持ってくるか検討したが、左右対称に配置することにした。
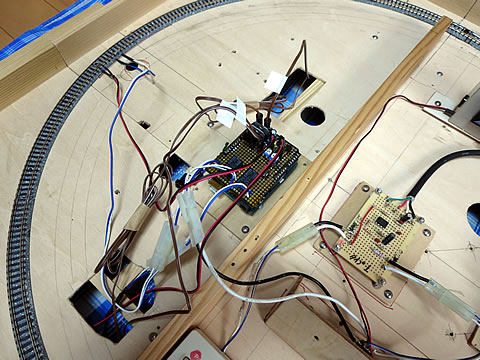
シールドの回路も修正し、電動ポイント駆動ユニットを測定台に取り付けて配線を実施する。
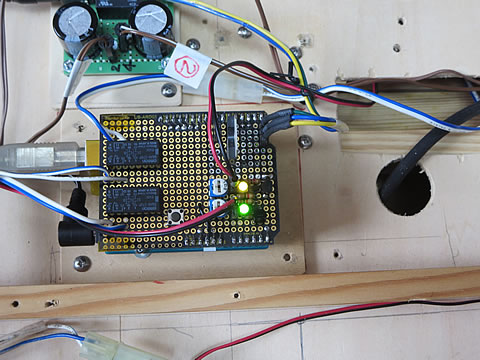
いろいろな配線が交差しており、どの線をどこにつなぐか、その方向は? 今は頭に入っているがそのうちに間違えてしまうのは明らかなので、接続解説図などを張り付けておく必要があるだろう。
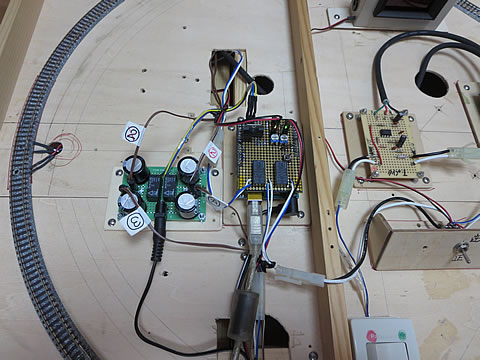
そして、測定台の傾斜をセンシングしていたユニットについても、場所を移動して設定し直した。 これは、奥の測定ゲートを中央部に設置したため、台の裏側で干渉してしまったのである。 傾斜角の測定は、再度校正する必要がある。 装置全体の様子を上右の写真に示す。 また、この時の状態を動画に収めたのでご覧ください。 快調に作動しており、今までの苦労が報われたような気がします。

次回は、いよいよ有線通信線のための工作を実施しよう。
************ コンデンサ方式のポイント駆動ユニット (2016/1/23) と 自動運転制御ユニットのテスト (2016/1/24) を再編集 ********