
HOME >> 鉄道模型工学 > 動力特性の比較 > KATO D51の新旧比較
鉄道模型工学 KATO D51の新旧比較
■ はじめに
KATOは、C62に続くリニューアル第2弾として、現役で活躍する498号機をファインスケールと新動力機構採用によりD51を2010年11月に発売した。 その特徴や分解調査の報告は、ネット上で多く報告されているので、そちらを参照して頂くことにし、ここでは、その動力特性について手製の測定器で測定した結果を報告する。
■ 比較した車両
KATOの新動力機構を搭載したリニューアルD51と、従来機構D51の動力特性を比較する。
| 品名 | 品番 | 車両番号 | 購入時期 | 備考 |
| D51 標準形 | 2006-1 | D51 125 | 2007年4月13日 新品購入 | 前照灯点灯せず |
| D51 498 | 2016-1 | D51 498 | 2010年12月6日 新品購入 | 前照灯点灯 |

手前が、D51 498号機で、向こう側がD51 125号機である。 498号機は、厳密に1/150 のスケールとしたとのことで、長さなどはやや短くなっている。
■ 速度特性
回転式円盤により、SL単機走行による車速特性を測定する。
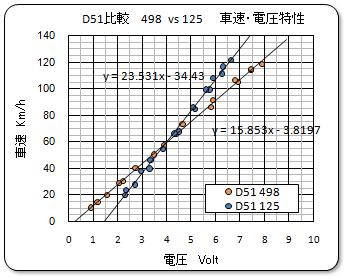
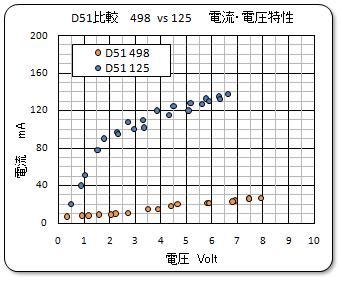
498号機は新規にコアレスモータを採用しており、性能としては旧製品と明確に異なっている。 低速域はスムーズであり、何よりもその消費電流の少なさには驚かされる。 前照灯は点灯しているので、モータとしてはもっと少ないようだ。
電圧の立ち上りは低く、速度係数(速度/電圧の比)も小さい。 このため、低い電圧から動き始め、速度の増加も緩やかである。 そして、ギヤやロッド類の摩擦が少ないことも伺える。 また、新しい機構を採用したとしても、新旧の車両が、60Km/h付近で同一の速度になっている。 模型として一番使って欲しい速度付近は、従来製品と違和感の無いように設定したとの設計者の意図とも思える。 この近辺で、速度が同程度であることは、旧製品との重連運転が可能であることを示唆している。 スケールの違いは別として。
■ 牽引力特性
次に、牽引力特性を見てみよう。
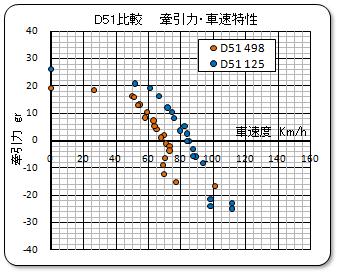
電圧は、E = 5.0 Volt 一定状態でそれぞれ測定した。 単機走行(牽引力ゼロの状態)での速度は、車速・電圧特性にも示した通り、125号機の方がやや速いが、牽引力/速度の勾配は、ほぼ同じ傾向であった。 電圧 4 Volt 付近ではピッタリと一致するものと思われる。 小さなコアレスモータを使用して、従来品と同等の牽引特性を確保しているのは、さすがである。 なお、動力部を分解調査し、ギヤ比を報告されているBさんのブログによると、ギヤ比は 30:1 で、旧製品の 33:1 より小さいとのこと。 それにも関わらずこれだけのトルクを出しているのは、モータのトルクがしっかりと確保されていると言うことになるようだ。
また、車輪に掛る荷重と摩擦係数で決まる粘着限界での牽引力は、ほぼ同じで、20 グラム近辺のようだ。
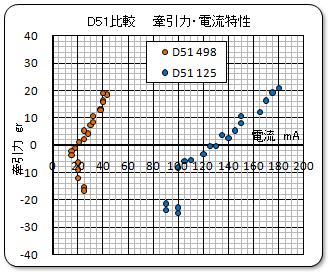
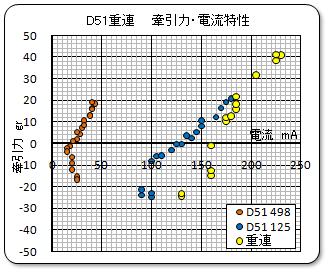
電流については、明らかに異なっており、498号機では負荷に対する電流増加の割合は小さい。 これは「エコ機関車」とも言えそうである。 摩擦抵抗が小さい上に、モータの効率も良いことを示しているのかな。 でもこんなに消費電流が少なくなっていることは、機械屋の小生には理解し難い。 技術革新の成果なのか。
制動領域での測定方法はまだ確立していないので、なんとも言えない。 しかし、メカ部分の摩擦抵抗を示すウオームギヤの変曲点(ロ点)は読み取ることが出来る。 即ち、498号機では -2 グラム程度、125号機では -8 グラム程度であり、498号機の摩擦抵抗が非常に小さい事を証明している。
■ 重連の可能性
この新旧のD51を重連させることは、問題無いように見える。 そこで、
1) 重連させる車両の速度を合わせること
2) 足の速い車両は前に置け
の原則に従って、498号機を本務機、125号機を前補機にして重連させて見た。 498号機には、交換用として付属されていた重連用ナックルカプラーを装着して対応する。 この状態で測定した牽引力特性を次に示す。
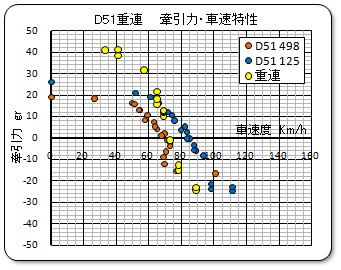
この重連特性は、始めて測定したデータであり、大事な模型を傷めないかと、おっかなびっくりで測定した。 従って、データ測定点が少なめであるが、 “重連特性を考える” で検討した内容通りの傾向を示しており、嬉しかった。
牽引力係数(牽引力/速度の勾配)は、粘着限界での牽引力と共に、約2倍に増えており、30グラム付近から少し勾配が変化している。 これも屁理屈通りなり。 電流値については、お互いに引張やっこをしているので、高めに出ている様である。
速度特性を測定するのを忘れてしまったが、スタートからの走行状態は観測した。 低速では、本務機が後ろから押していたが、その後、前補機が引っ張る状態になる事も観察することが出来た。 円盤を回転させながら走行させているので、連結部の状態もじっくりと観察出来た。 その結果、動輪やロッド類の異常な運動は観察されず、この組合せによる重連運転は問題ないものと結論付ける。
![]()
今回の重連走行でも、いわゆる “ギクシャク走行” を観測することが出来なかった。 問題無いのも嬉しいが、不具合現象を再現させるのも、我が研究テーマの一つである。