
鉄道模型工学 制動領域での動力特性
■ はじめに
傾斜式の測定装置と簡易速度計の活用で、動力車の制動領域での動力特性の測定がかなり安定して測定出来るようになってきた。 そこで、これらの測定データを参考にしながら、鉄道模型工学概論の補足として、制動領域での挙動と特性を考察することにした。
このページは、今年の初めから書き始めたが、本当かなという疑問が頭の片隅にあり、しばらく筆を置いていた。 最近になって、 RM MODELS の203号(2012-7)に「居酒屋ミーティングから生まれたEF510 」の記事があり、KATOの設計者による動力ユニットの開発苦労話が記載されていた。 その内容には、参考となる記述が多数あり、自分の考えが間違っていないぞとの自信ともなった。 注目した点は、
- 「下り坂のノッキング」: いままでは「ギクシャク運動」などと表現していたが、自動車分野でも使用されている「ノッキング」と言う表現を鉄道模型界でも使うのだと言うこと。
- 開発時には、メーカーでもその現象の改良に苦労されていたこと。
- その原因が、ウォームギアのロックが断続的に繰り返されるためであること。
- 対策として、いかにウォームを回転させるかというのがポイントであること。
- そのためにウォームの効率を上げる事もポイントで、EF510では2条ウォームを採用したこと。
- 開発には、パワーロスのない動力システムに注力したとのこと。
などである。
この説明を読んで、設計的に特徴のあるこの台車動力ユニットを分解し、観察してみたくなったが、HOゲージには財力とスペースの問題で手が届かず、分解と観察だけのために購入するのも勿体ないので、乏しい小遣は9月発売のC56 のために積み立ておくことにした。
![]()
■ 制動領域での挙動
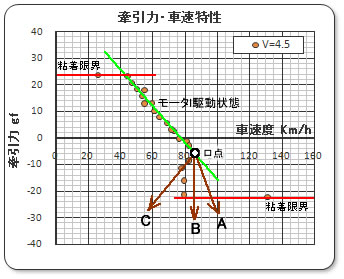
動力特性の基本式で述べた動力特性を振り返って考えることにする。 鉄道模型工学概論の動力特性の理論と測定において、§1.6 では図9に示すように平坦路走行での牽引力・車速特性をグラフ化して考察した。 そして、(A)の状態、即ちモータの正常な駆動状態や、(C)および(D)の粘着限界の状態は、実際の測定データについても、その傾向は良く合致していた。 しかし、制動領域での特性は、どのような特性になるかは未検討であった。
その後の色々な車両の測定データをもとに、この領域の特性を検討してみよう。
ウォームギヤに掛る力が逆転するロ点( ウォームギヤに掛る力の形態が変化することから、今後、遷移点と呼ぶことにする。) を境に、制動力が大きくなると、左の図に示すように、A、B、C の方向に進む事が考えられる。 測定データを観察すると、この三っつの形態がそれぞれ観察されている。
1) A方向に進む場合:
制動力の増加と共に車速は増加すると言う事は、即ちモータの回転数が増加することであり、これは、モータが何らかの力で回転させられ、発電状態になることである。このためには、ウォームギヤを介して車輪側から駆動される必要があるが、逆効率ゼロの通常のウォームギヤでは、まず考えられないことである。 もうひとつの考えとして、動輪がスリップして、車体の速度とモータの回転数が一致しない場合もこの傾向を示す。 特にトラクションタイヤを履いていない場合などでは、この傾向を示しても不思議ではない。
注意する点として、遷移点(ロ点)が下の方に下がっている状態と混同 しないようにする事である。 駆動系の摩擦抵抗が大きい場合には、粘着限界近くまで来ている場合もある。 この場合には、牽引力・電流特性を見ておくと判断しやすい。
2) B方向に進む場合:
制動力の増加と共に、ウォームギヤに掛る力が変化しない場合とか、 あるいは、ウォームギヤに掛る力が大きくなったとしても、ウォームの回転摩擦は一定に保たれた場合には、モータの負荷が変化しないのでモータの回転数も変化しない。 このため、車体の速度も一定の状態を保つ場合である。 制動力が増加してもウォームギヤに掛る力が変化しない場合とは、動輪や減速ギヤなどの摩擦抵抗が制動力に比例して増加するため、この摩擦抵抗によって車輪の制動力を高めている現象も考えられる。
3) C方向に進む場合:
制動力の増加と共に、ウォームギヤに掛る力が大きくなり、これによってウォームの回転摩擦が増加した場合には、モータの負荷が大きくなった事を意味するので、その結果としてモータの回転数が低下する。 その結果、車体の速度も減少する状態である。 現象としてこのような場合が多いのではないかと考えている。 そして、粘着限界に近づくにつれ、車輪のスリップ現象が大きくなり、結果的にはS字形のパターンを示すようになると推察する。
4) 各形態を移動する場合:
上記の形態は、その状態を一定に保つ場合もあるし、条件によっては行ったり来たりする場合も考えられる。 また、ウォームの歯面が外れて駆動状態になる場合も発生すると思われる。 この状態では、「ギクシャク」運転、即ちノッキングを起こしている状態と推察する。
即ち、これらの形態を考える時には、ウォームに掛る回転モーメントがどうなるかを考える事が重要となってくる。
■ 制動領域でのモデル化
ウォームギヤの噛み合い状態について、もう一度考えてみよう。

実際の状態は上の写真のように噛み合っているが、ホイールの歯とウォームの歯は、かなりの隙間(バックラッシュ)を持って噛み合っているのが分かる。
この時の回転方向と力の掛る方向の状態には概論でも述べた様に、駆動状態と制動状態がある。 上のイラストの様に(写真とはウォームのねじれ方向が逆であるが)、ウォームからホイールに向けて掛る力の方向が、ホイールの回転方向と同じ状態が駆動状態(A)であり、逆の場合が制動状態(B)である。 ようするに、ホィールにおいて、力の掛っている方向に回転しているのが駆動状態(A)で、力を受けながら後ずさりしているのが制動状態(B)である。 この状態が変化する点を遷移点と呼ぶことにする。
さて、またまた、ややこしい図を持ち出して申し訳ない。 動力機構を簡単化すると下の図のようにモデル化する事が出来よう。 動輪とウォームギヤによるシンプルな構成で考える事にする。
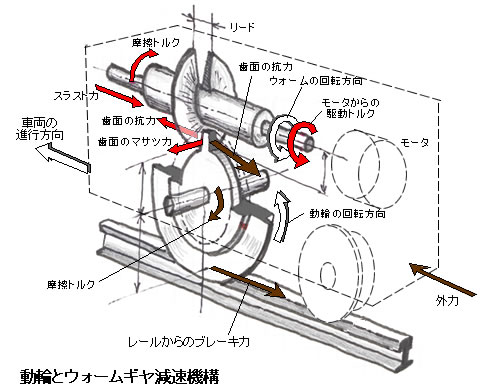
車両が制動状態の場合、車両重心に掛る重力の坂道勾配成分とカプラーに掛る力の合計が、外力として車両を進行方向に押すものと考える。 この外力を受けるものとして、レールから受けるブレーキ力である。 この外力とブレーキ力は方向が反対で大きさは同じである。
このブレーキ力が車両内部でどうの様に伝達され、車両の速度を決めるモータの回転数にどのように影響するのかを考えればよい。
レールから受けるブレーキ力は、まず、動輪の半径を掛けると回転モーメントとなる。 このモーメントを受ける止めるのが、動輪の摩擦トルクとウォーム歯面から受ける抗力モーメントである。 この歯面の抗力について、もう少し詳しく見て見よう。
その関係図を左に示す。 この図はウォームを主体にした図であるが、歯面の抗力は図のように歯面に直角に作用する。 そしてその反力はウォームホイール側にも作用し、動輪に掛るブレーキ力に対抗する抗力モーメントとして発揮される。
ウォームの歯面には、リード角と共に圧力角も存在し、複雑な3次元の関係を構成するが、これらをすべてシンプル化し、接触点におけるウォーム軸と平行なスラスト成分と円周方向の接線方向成分について考えることにする。 残りの成分はウォーム軸のラジアル成分となるが、これらは軸受けの摩擦抵抗に影響するものとして処理する。 その結果はウォーム軸の摩擦トルクとなって現れる。
スラスト成分は、ウォーム軸のスラスト受けによって保持され、これによってもウォーム軸の摩擦トルクとなって現れる。つぎに、接線方向成分(回転方向成分)について見てみよう。 上図のように、ウォームとホイールの接触点に於いては、歯面の抗力により、接触点での摩擦による摩擦力が働く。 この抗力と摩擦力の合成力の方向は、リード角よりも小さい場合、即ち、合成力の回転方向成分が回転方向と同じなら、ウォームを加速させる方向に作用する。 この回転力がウォーム軸の摩擦トルクよりも大きい場合には、歯面からの抗力によってウォーム軸を回す事が出来、モータを発電機として作用させる事が可能となるが、この様な場合は、リード角が大きいか、あるいは摩擦力が極端に小さい場合であり、一般的には摩擦力のため、図のように回転方向とは反対方向に作用し、ウォームの回転に抵抗する方向に作用することになる。 これがウォームギヤの逆効率がゼロになる原因であり、かつまた、ネジ類が緩まない事と同じ現象なのである。
我らの鉄道模型では、一般的には、この抗力と摩擦力の合成力の方向は回転方向とは逆の方向に作用し、ウォーム軸の摩擦トルクと相まって、ウォーム軸を回す為の抵抗モーメント、即ち負荷トルクとして働く。 そして、この負荷トルクにより、モータのトルク特性に従って、モータの回転する速度が決まってくるのである。
即ち、ウォーム歯面の状態とウォーム軸受けの状態から、どれだけの負荷トルクが発生するかによって、A、B、C の方向が決定される要因と考えられる。
勿論、ウォームギヤに至るまでの伝達経路でのトルク損失(摩擦トルク)の影響も要因であることには変わりはない。そして、どちらの要因であるかを判別するのは容易ではないと思われる。
また、KATOのHO/EF510 では2条ウォームを採用したとのことであるが、これはウォームのリード角を2倍にすることとなり、逆効率ゼロから脱出している可能性もある。 そして、車輪のブレーキ力でもモータを回転させていることによって、ノッキング現象を解決しているのではと推察する。
■データから見た制動特性
では、実際の測定データを見ながら、これらの形態を見ていく事にしよう。
◆A方向に進む例 【 遷移点が大きい場合 】
ウォームギヤに至るまでの伝達経路でのトルク損失(摩擦トルク)がきわめて大きい場合には、遷移点(今までロ点と呼んでいた)が制動領域の底辺近くまで下がり、あたかもA特性(上記のA方向に進むもの)の様に見える場合がある。
この様な形態を示した動力ユニットとして、BANDAI の動力ユニットが挙げられる。 牽引力と車速、あるいは、牽引力と電流の特性を見ると、駆動状態から連続してどんどん下がっているのが分かる。 これはモータが負担していた駆動系の摩擦トルクを制動力がどんどん分担してくれるので、モータの負荷が下がり、回転数が上昇している状態である。
◆A方向に進む例 【 逆効率がゼロでない場合 】
A方向に進むデータの場合、ウォームギヤの逆効率が生きている(ゼロでない)場合もありうる。 動輪からの制動力はウォームギヤを通してモータに作用し、モータが発電機としては機能している場合にも、同様な傾向を示すと思われる。鉄道模型では、この様な例は稀と思われるが、3条ウォームギヤを使った例などが有るようです。 逆効率の程度によってデータの勾配が異なってくるので、いろいろなパターンがあると思われるが、実際の車両とその測定データは持ち合わせていませんので悪しからず。
この様な例は、電源を切って手で車両を押してみれば、動くかどうかで容易に判断出来るが、動輪がすべている場合とは違いますので間違えないように。
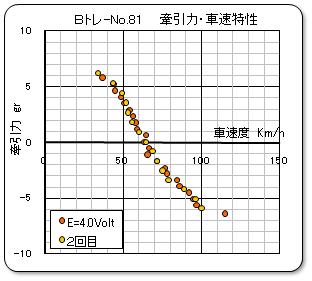
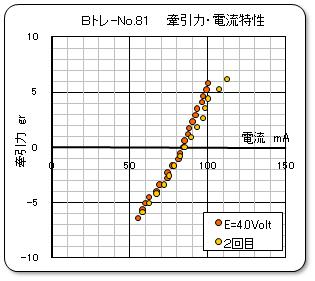
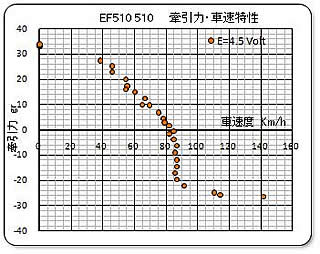
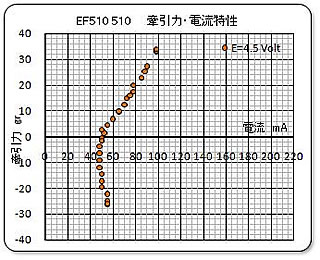
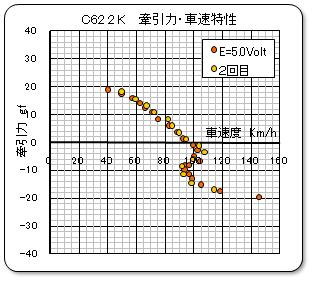
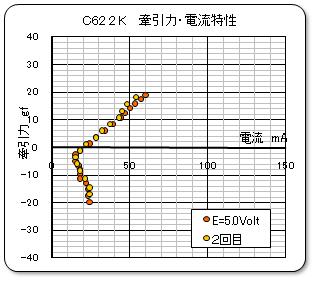
◆A方向に進む例 【 動輪がすべっているのでは無いかと疑っている例 】
動輪と線路の間の粘着力と制動力のせめぎ合いで、動輪が滑っている状態も多いに存在すると考えている。 一般的に、作用する力とスリップ率は相関関係があると言われているので、いくらかのスリップは常に発生していると考えるべきであろう。 その程度が大きくなると、動輪の回転数と車体の速度は計算通りには行かなくて、制動状態では車体の速度が早くなってしまいます。
上のデータは、制動域で車速が上昇している例ですが、動輪が滑っているのではないかと見ています。 厳密には走行中のモータか動輪の回転数を計測して、車体の速度と比較する必要がありますが、まだその測定手段がありません。
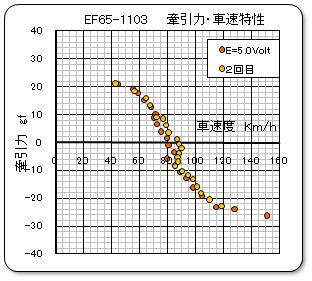
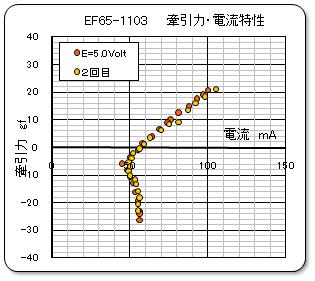
◆B方向に進む例
制動領域では、ほぼ一定の車速度を保っている例で、多くの車両で観察されています。
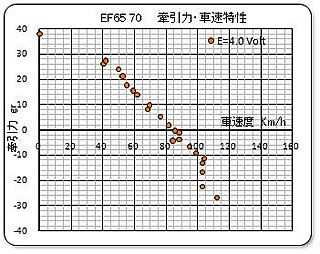
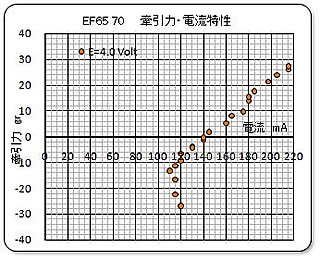
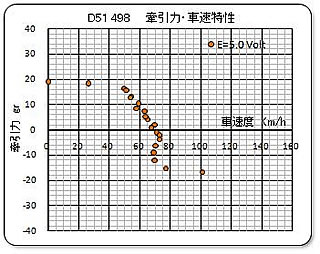
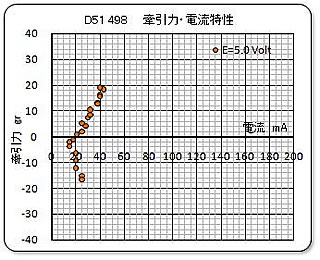
左右のグラフを見比べていると、遷移点で特性が折れ曲がっているのが良く分かります。 駆動系の様子が明白に変化した事を示していますが、どのように変わったのが分かると良いのですが・・・・・・・・・。
KATO製の D51 498 は、上記の設計者の話によると開発時にノッキング対策が問題になった車両であるとのこと。 すでに改良されているので、このデータからは読み解けないと思うが、当初はどのようなパターンであったのか興味深々である。
◆ C の方向に進む場合
制動領域での動力特性の測定が安定して測定出来るようになってきたため、はっきりとデータに現れるようになりました。
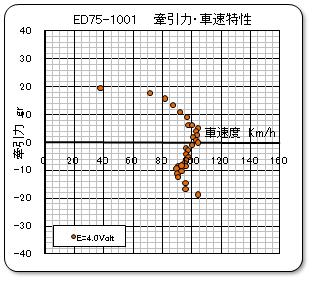
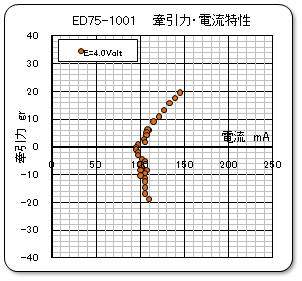
このようなS字カーブを描く車両でも、ノッキングを起こすとは限りません。 走行状態には何ら異常は見られないのにデータを整理してみて初めて気が付く場合が多々ありました。
◆ KATO製小型車両用動力ユニットの場合
KATO製のBトレ用動力である小型車両用動力ユニットを測定した結果、個体毎にパターンが異なっていたり、前進と後進で異なっていたしていた。
これは、制動領域でのパターンに与える要因の影響が非常に微妙であることを示しているのではないかと推測する。 即ち、構造とその構成部品が同じでも、関係部品のちょっとした変化によって、その作動形態が微妙に変化する事を示唆しているのではないだろうか。
◆ 回転数によってパターンが変化するのではないか思われる例
補助動力車 カニ24 の動力測定を実施した結果、車速度すなわち駆動系の回転数によってもパターンで変化する例をみた。
車速度によってAパターンからBパターン、Cパターンに変化している様であり、何が原因なのか足がかりも無い状態である。
■ まとめ
鉄道模型(Nゲージ)において、動力車の動力特性は駆動領域では殆んどが右下がりのパターンを示しており、屁理屈通りと理解している。 しかし、制動領域では、いろいろなパターンが観察されており、小生にとって、その原因調査は暗中模索の状態であると言っていいだろう。
今回の考察で、今後注目するポイントがさらに増えてしまったが、さらに解析するには、走行中のモータあるいは動輪の回転数を測定するなどの手段が必要かも知れないし、動力系のメカ部分を分解して、その構成を分類してみるのも一案である。 さらには、モータ単品の特性を把握する必要も感じている。
試験装置や解析機器が充実し、多くの実験と豊富な開発経験などのノウハウを蓄積されている模型メーカーでは、これらの内容について『企業秘密』となっているだろうが、教えてもらいたいものである。 それはなぜですかとRMMの記者の突っ込みがもっとあったならと思いつつ、記事を何度も読み返している読者です。 このような技術的な記事をもっと記載して欲しいですね。
さて、自分の測定したデータについても、もう一度新しい方法で測定し直す必要があると思っている。 あるいは、電車類など、まだ手を付けていないジャンルを測定したり、さらには、モータ単品の特性を測定したりと、いろいろと実施してみたい事が沢山ありますが・・・・・・・。
乞うご期待!
![]()