
HOME >> 鉄道模型工学 > 動力特性の測定の自動化 > 安定化電源の使用
鉄道模型工学 動力特性の測定の自動化 安定化電源の使用
■ いきさつ
動力特性の測定の自動化システムにおいて、改善を要する点の一つとして、電源の電圧の不安定性があった。 そこで、ネットオークションにて安価な定電圧装置を探してみる事にした。 その結果、アマチュア無線などで使用している「直流安定化電源」なるものに、10ボルト前後で、数アンペア程度のしっかりした定電圧装置が有る事が判った。 今回、古い機種ではあるが、KATOやTOMIXのコントローラよりもずっと安く、適切な装置を入手することが出来たので、この装置を使ってみる事にした。
 .
.
■ 直流安定化電源の概要
今回入手した直流安定化電源を右に示す。 外観は使い込んだのか、所々に塗装が擦れている個所があったが、電源を入れて見ると、スイッチやダイヤル類は正常に動いていた。
- 装置名称: PAB-A Series 可変直流定電圧・定電流電源
- 製造メーカ: 菊水電子工業株式会社
- 機種名: PAB 18-1A
- 入力: AC 100 V
- 出力電圧: 0〜18V
- 出力電流: 0〜1A
- 定電圧特性の安定度: 出力電流の0〜100%変動に対して 2mV 、リップル・ノイズ500μV
ネットで見てみると、菊水の最新モデルは右の物よりもっとスマートなデザインであった。 しかし、この古いタイプの装置は、厳つい外観であるが装置としての貫禄もあり、そしてずっしりと重くていかにも安定していると言った感じのする装置である。 この「菊水」と言う名前は、定かな記憶はないが、およそ40年位前に実験室でお世話になった様な気がする。 この名前を思い出して、なんだか懐かしい様な気がした。 そして、実際にこの物を使っていないうちから性能はバッチリであると信頼してしまった。
定電圧特性の安定度をみると、出力電流の0〜100%変動に対して 2mV の範囲とのこと。 これは、出力電流がどんなに変化しても、電圧変動は 0.002 Volt 以下と言うことであるので、欲しかった性能を充分に満足するものである。 出力電流も 0〜1A と、シリーズの中では最も容量の小さいタイプであるが、Nゲージの鉄道模型用にはピッタリと言えよう。
■ 装置を使ってみる
動力特性の自動測定装置でこの安定化電源を使ってみることにした。 下の写真にその様子を示す。 我が書斎も随分と狭くなってしまった。 データを受け取るパソコンは、孫のパパからもらった古いノートパソコンを使っている。 2013/3/29のメモに記載したが、当初はWindows2000が搭載されているのでArduinoが作動するのではと思ったが、やはりダメであった。 そこで、WindowsXPにアップグレードしようとしたが、CDドライブが無い、LANボードも無い状態だったので、四苦八苦する。 2日間かけて、WindowsXP にアップグレードし、やっと作動するようになり、自動測定システムと無事連携できるようになった。 測定データは、USBメモリを使ってデスクトップパソコンに移し替え、データ整理を実施している。

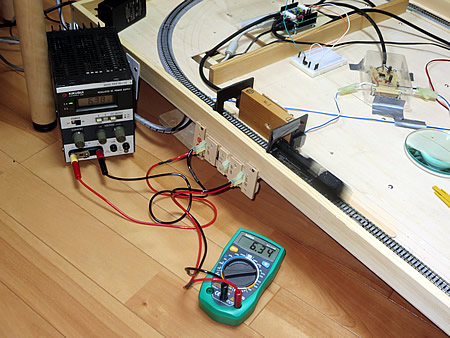
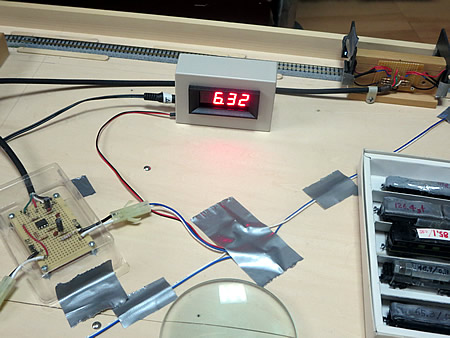
電源から測定装置への接続は、右上の写真の様にテスター用ケーブルを使って接続する。 今回は、電圧測定用のテスターも接続して、それぞれの電圧計のチェックを行うことにした。 右上、左下、右下の写真に示すように、それぞれの電圧計の表示が微妙に異なっている事が判る。 また、右上の写真に模型車両(C50)がぶれて写っているが、回路の負荷として車両を走行させている状態である。

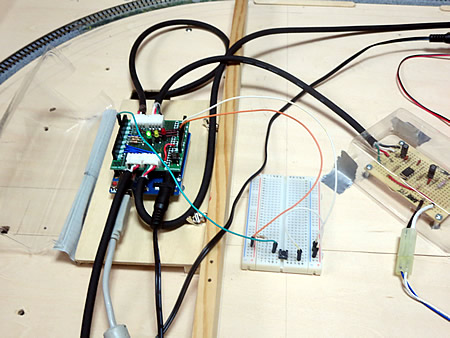
Arduino の電圧検出部も同時にチェックするため、デジタルポート5に押しボタンを接続し、以前実施したように「送信テスト4」のスケッチを使って較正することにした。 なお、この時の各電圧計の位置関係を右上の簡単な回路図で示す。
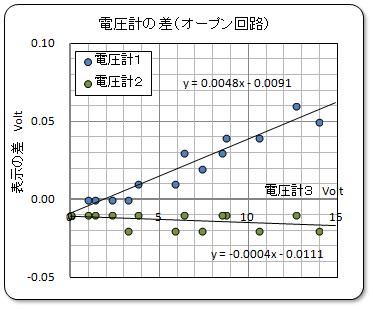
まず、三つの電圧計の関係を調べてみた。 線路上に車両を置いていない状態、即ち、回路がオープンな状態での各電圧計の指示値を比較した。 メインの回路は切れているので、本来なら電流はゼロであり、もし正確であれば各電圧計は同じ値を示すはずである。 しかし、それぞれの検出部には何らかの抵抗を使用しているため、電位差が発生する可能性もある。 電圧を変化させた時の電圧計の読みをプロットしたのが左上のグラフである。 電圧計3を基準にして、電圧計1や電圧計2の差を縦軸にしめす。 表示差はわずかであるが、電圧計の2と3の差が殆んど無いので、この値を信用することにする。
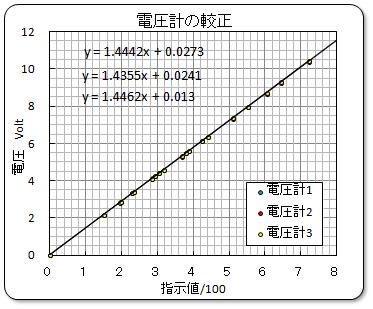
次に、回路上の負荷としてC50-142号機を平坦路単機走行状態にし、100mA程度の電流が流れている状態で、Arduino からの信号を解析した。 これは、実際の測定時を考え、その時の配線の電圧降下を想定したものである。 その結果を右上のグラフに示す。
「送信テスト4」のスケッチでは、Arduino が示すAD変換後の指示値を3個測定して送信してくるので、それを平均し、さらに1/100にして横軸に取っている。 縦軸は各電圧計の読みである。 3個のAD変換後の指示値は殆んど同じであり、異なっていても1までであったので、小数点以下の四捨五入の誤差の範囲と考えられる。 この結果より、「電圧・電流測定ユニットの不思議な振動」で見られたような現象を起こしていないと判断し、電源が信頼出来るものであると考えれれる。 また、横軸としてデータを1/100にしているのは、縦軸と横軸の桁数を合わせて近似直線の数値の有効数字をアップするための工夫である。
Arduino のAD変換換算値として、この近似直線のどれを採用しようかと思案したが、電圧計測点のもっとも近い電圧計3の数値を換算値とすることにした。 測定値の有効桁数は3桁とみて、 Y = 0.01446X にて電圧に換算することにした。 この値は今まで使用してきた y = 0.0137x - 0.0219 と異なるので今までのデータを見直す必要が出てきた。
■ 実際の計測例
動力車を走行させて、今までの様に自動計測を実施してみた。 動力車は、先日測定済みのKATO の C50 型 142 号機を使用する。 牽引力特性を測定する時は、平坦路状態に於いて、パネルメータを見ながら電源のつまみを調整して電圧を設定し、測定を開始する。 傾斜が大きくなり負荷が増加しても電圧設定値の変化は無く、そして、測定前後での電圧設定値のドリフトは見られなかった。 さすが安定化電源である。 満足!
この時のデータと比較して下に記載する。 電圧の換算値を修正しているので、今回のデータは電圧がやや高めに出ている。
| 使用電源 | パワーユニット TOMIX N-401 | 直流安定化電源 PAB 18-1A | |
|---|---|---|---|
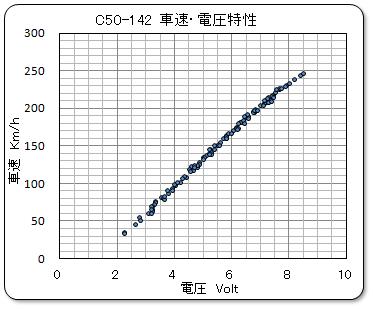
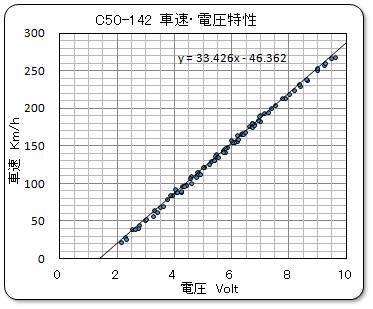
速度特性 (単機平坦路走行) |
 |
 |
|
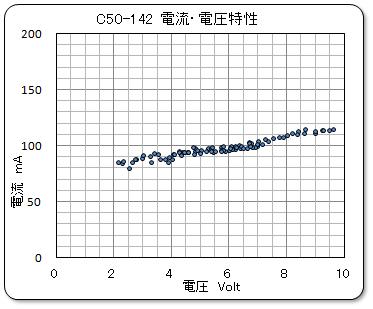
| 車速・電圧特性 | |||
| 電流・電圧特性 | 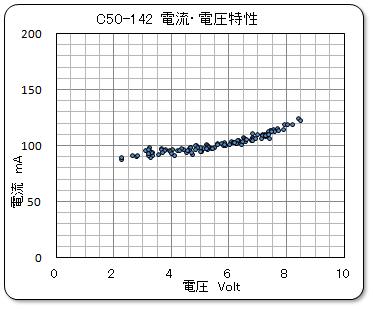 |
 |
|
牽引力特性
|
 |
 |
|
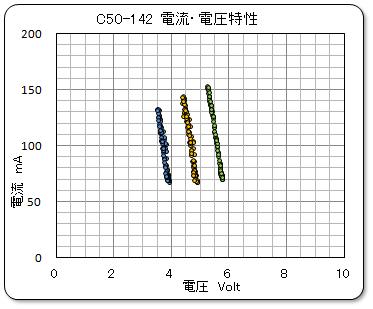
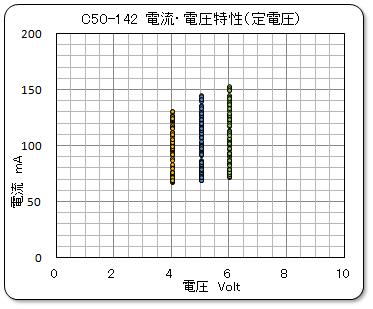
電流・電圧特性 (電源の特性) |
|||
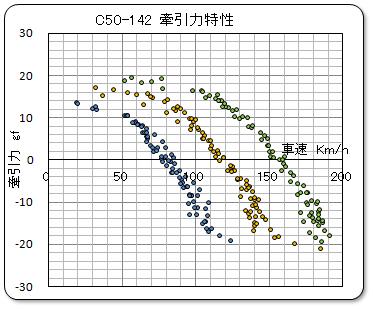
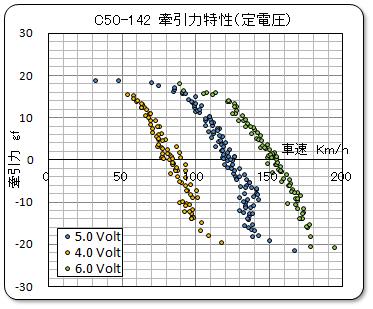
牽引力特性 (牽引力・車速) |
 |
 |
|
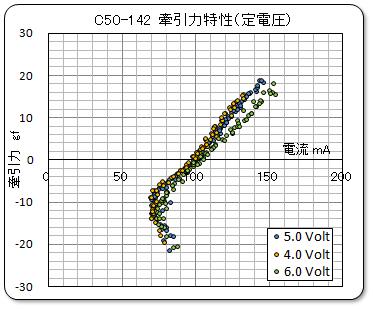
牽引力特性 (牽引力・電流) |
 |
 |
|
今回使用した直流安定化電源の特徴が、牽引力特性の電流・電圧特性にはっきりと出ている。 電流がどんなに変化しても、設定どおりの電圧をぴたりと確保している。目標としてきた、設定値 ±0.05Volt を充分に満たしている。 これで、測定データのバラツキ要因の中から「電源」の要因が排除出来るであろう。
また、牽引力特性(牽引力・車速)の勾配は、電圧設定が一定値を確保出来るようになったので、以前のデータと比較できるようになった。 こらからは以前と同様にパラメータとして表示することにする。
■ まとめ
アマチュア無線などで使用されている直流安定化電源は、この動力特性の自動測定システムにピッタリの装置である事が証明出来た。 今後はこの装置を使用して、今までのデータの再測定と、未測定動力車の測定を実施していくことにする。
![]()