
HOME >> 鉄道模型工学 > 車両の静的特性のモデル化と特性解析 その1 その2
鉄道模型工学 車両の静的特性のモデル化と特性解析 その1
■ はじめに
動力車の動力機構の解析を進めるために、モータ特性のモデル化に引き続き、車両特性のモデル化を検討しました。 これは、線路から供給された電圧と電流、及び、車両の速度と牽引力の4つの測定値から、車両特性を推定しようとするものです。
しかし、数式自体は参考文献などから容易に組立てることが出来るのですが、
モデル化で一番の問題は、数式に含まれる定数の「数値」をどうやって設定するのか? と言うことです。
動力機構の特性を解析するには、走行中のモータ出力と回転数、および、動輪のトルクと回転数などを把握しなければなりません。 ホビーとして実施している小生の実験室では、これらの変数を直接測定する方法が有りません。 そこで、線路に供給された電圧と電流から走行中のモータの状態を推定し、動輪のトルクと回転数は牽引力と車速から推定することにより、動力機構のインプットとアウトプットを推測することにしました。 これにより、関係する定数を求め、模型車両の車両特性をモデル化しようとするものです。 そして、効率の計算とその要素の解析にかんする一手法を提案するものです。
また、鉄道模型車両は、メーカ毎に、あるいはモデル毎に異なっています。 さらに、個体毎にもバラツキがありますので、これらの定数は製品毎に求める必要があります。そこで、測定データをもとに、これらの定数を容易に推定する方法も探索することにしました。
そしてここでは、個別車両毎に測定と解析を実施してきた「動力車の調査」の報告内容を集大成し、解析のための手法を確立しようとするものです。
■ 車両の関係式
まず始めに、模型車両の関係式を整理しておこう。 鉄道模型工学概論に記載した関係式と、その後、動力車の調査で追加した車両に関する式を整理して再掲載しています。 ここでは、慣性や加速状態など考えていない静特性を考えています。
まず、関係式を整理し、鉄道模型工学概論に記載したブロック図を修正しました。
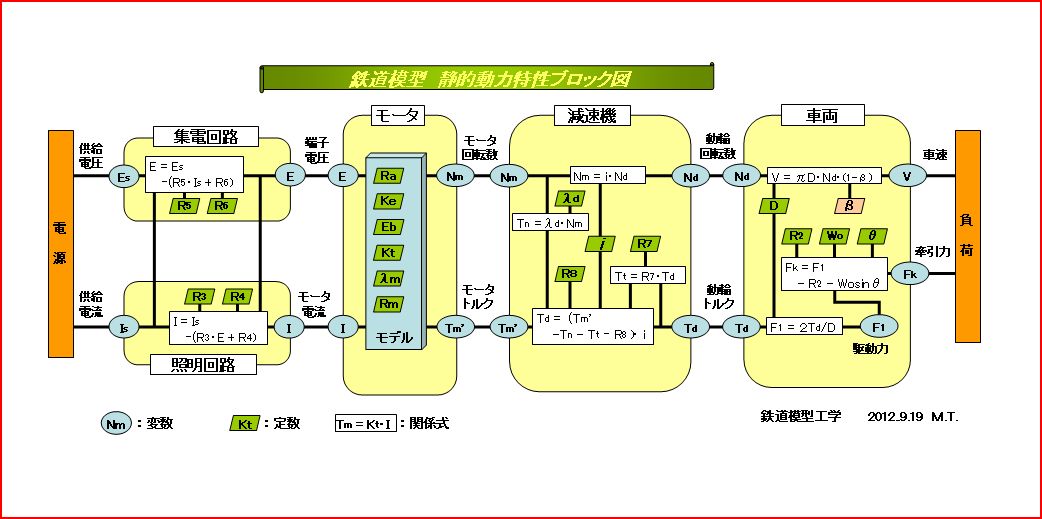
新しく使用した記号などを右に示します。 今回、モータの端子電圧と電流を把握するため、照明回路と集電回路を追加しました。 証明回路は、前照灯などの回路で、一般的にモータと並列に結線されているため、電流が分岐されます。 また集電回路はレールから集電された電力を不安定な接触部を介してモータまで通電する間に、電圧降下が発生します。 これらの特性を入れ込みました。
1) 照明回路
まず、照明回路から考えます。 この照明回路はモータ端子とほぼ同じ部分に接続されているため、この回路の電圧はモータ端子電圧と同等とみなすことができます。 そこで、オームの法則を参考にして、回路を流れる電流をモータの端子電圧E の1次式で表わすと、
![]()
とする事ができます。 定数のR3 とR4 は、実測値から求めます。 この照明回路は一般的にモータと並列に結線されているため電流が分岐されます。 このため、モータに流れる電流は、この照明回路電流が差し引かれた電流となります。 即ちモータ電流を I 、供給された電流を Is とすると、
![]()
2) 集電回路
集電回路はレールから集電された電力を不安定な接触部を介してモータまで通電する間に、電圧降下が発生します。 これも、オームの法則を参考にして、集電回路の電圧降下は、供給される電流 Is に関係するとして、
![]()
とすることにします。 そして、この電圧降下によって、モータの端子電圧E は、
![]()
となります。 ここで、電流は、右の線路 → プラス側集電回路 → モータと照明回路 → マイナス側集電回路 → 左の線路 と流れて電源に戻ってきます。 即ち、電圧降下はプラス側とマイナス側で同時に発生しますが、ここではその合計した値を示すものとします。
3) モータ
モータに関しては、既に求めているモータモデルを使用することにします。 ⇒ 「モータ特性のモデル化」
4) 減速機
減速機構のインプットとアウトプットを、モータの回転数 Nm とトルク Tm' 、および、動輪の回転数 Nd とトルク Td に設定する。 すると回転数に関しては、歯車がかみ合っているため、ギヤ比を i とすると、
![]()
の関係が成り立ちます。 歯飛びや破損しない限りこの関係は厳密に守られます。
次に、減速機構の損失トルクを考える時にいろいろ悩みましたが、ウォームギヤの構造や測定データの内容を検討する中で、「速度の項」と「力の項」を分離して考えることにしました。 即ち、損失トルクを回転数に依存する成分とトルクの大小に依存する成分に分離して考えます。 そして、この回転数は入力側のモータの回転数 Nm とし、トルクは、動輪のトルク Td とすることにしました。 これは、減速機構の大部分の損失トルクはウォームギヤの歯面の滑りで発生していると考えたからです。 もし速度に関係するのであれば、歯面を滑る速度、即ちウォームの回転数に関係し、力に関係するならば、歯面に掛る抗力、即ちウォームホイールのトルクに関係するはずです。 そして、ウォームホイールのトルクは動輪のトルク Td に置き換えることが出来ます。
即ち、 減速機構の「速度の項」に関する損失トルクを Tn 、 「力の項」あるいは「抗力項」を Tt 、とすると、
![]()
![]()
となる。 この抗力項の R7 は一種の摩擦係数とも考えれます。 そして、モータのトルク Tm' と、動輪のトルク Td の間には、
![]()
の関係が成立します。 R8 は、速度にも抗力にも関与しないその他の損失トルクとしています。
5) 車両
次に車両関係を考えて見ましょう。 動輪の回転によって車両は前に進むのですが、動輪のスリップがあるため、回転数と車速とは1:1には対応してていません。 即ち、車両の速度を V 、動輪の回転数を Nd 、動輪の直径を D 、スリップ率をβとすると、
![]()
の関係が成立します。 一方で、動輪のトルクを Td 、動輪の駆動力を F1 、とすると、
![]()
となります。 さらに、カプラーに掛る牽引力 Fk には、従輪の抵抗力 R2 や勾配抵抗 Wo・sin θが差引かれ、
![]()
となります。
6) まとめ
各要素毎の関係式は上記で関係付けを行いました。 そして、それらを連結していけば、各変数を求めることが出来ます。 ここで、4端子ブロックの特徴として、そのブロックのインプット/アウトプット変数において、ある変数を求める場合、他の三つの変数のうち、二つの変数さえ分かれば計算出来るのである。
このことを念頭において、車両走行時に、外部から測定出来る四つの変数、即ち、供給側の電圧と電流、そして走行車両の速度と牽引力の測定データを使って、車両の特性を決める各種の定数の値を推定することが出来るはずです。
■ 照明回路の定数の測定
照明回路に関する定数 R3 と R4 は、部品単品で測定することが出来ます。 即ち、
![]()
の関係と定義していますから、車両からライト基板を取り出し、集電回路に接続する部分に電圧を掛け、その時流れる電流を測定していきます。 この計測は電流値が安定しているため、デジタル電流計で細かく読み取ることが出来ます。
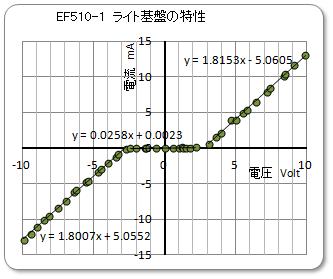
この測定データをグラフ化して、直線近似させれば、勾配が、 R3 を、Y切片が R4 を示すことになります。 このライト基板はLEDを使用しているため、3ボルト近辺から立ち上っていますので、データのグラフ化に際してはグループ分けを実施しておく必要があります。 また、前進と後退の場合に、特性が大きく異なり場合には、方向性も注意しましょう。
 .
.
.
■ 電気回路の定数の測定
電気回路に関する定数 R5 と R6 は、下記の式で定義していますが、その測定はなかなか困難です。
![]()
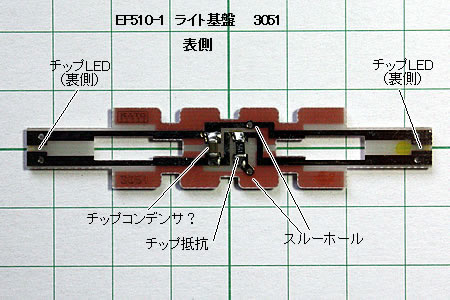
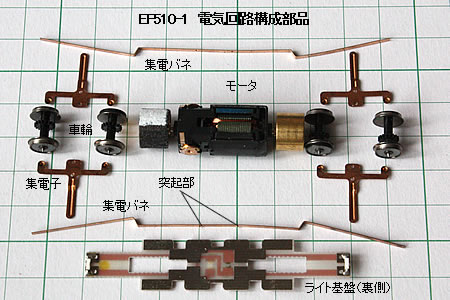
この回路を構成する部品の例を右の写真に示します。 レールと車輪、車軸と集電子、集電子と集電バネとの間で接触抵抗で通電するようになっています。 この接触抵抗の変化が激しく、また、汚れや酸化によっても大きく影響されます。
模型車両のスムースさは、ここで決まるとも言われています。 また、フライホール設置の目的が、この接触抵抗の不安定性をカバーするものであると考える事も出来ます。
そのために、いろいろな試みを実施してきたので、それらを紹介しましょう。
1)電圧差から電圧降下を測定する
この方法は第1弾で実施した方法である。 下の写真に示すように、レールの端部 A にユニットから電気を供給する。 そして、テスターのプルーブにて、ライト基板のスルーホール部 B と レール端部 A とで電圧を計り、その差をグラフ化したのが、右のグラフである。 測定前にレールのクリーニングは勿論実施し、測定中も、B 部で押さえながら車両を前後させながら測定するなどの配慮を行っている。
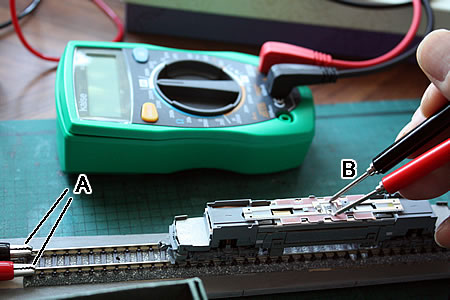
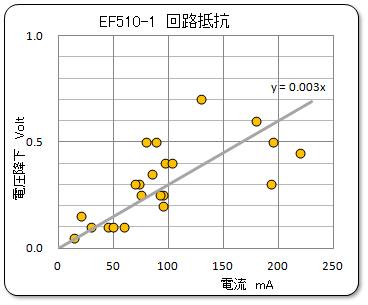
最初は写真に写っているデジタルメータで、AB 間の抵抗を直接計測したが、表示データは安定せず、その値も大きく変化していたので、計測不安定としてあきらめた。そこで電流を流して電圧を測定したが、電流が安定しないのでアナログテスターに変えて測定した。 このため、測定誤差も大きく、バラつきも大きい状態であった。
2)モータの代わりに12Ωの固定抵抗を接続して電圧降下を計測する
モータの代わりに12Ωの固定抵抗を接続し、レール上を転がしながら抵抗を測定してみることにした。 LEDが劣化して点灯しなくなった古い製品のライト基板を使用し、そこに、12Ω、1/4Wの抵抗を下の写真のように装着して組立てた。 電圧降下量は12Ωの抵抗(実測抵抗は、12.1Ωであった)による電圧降下量を差引いて計算している。
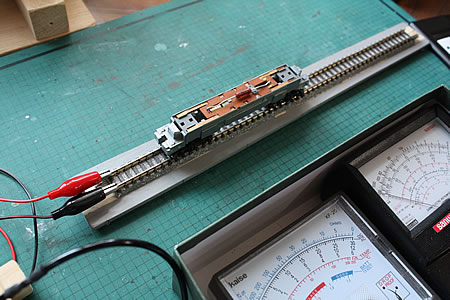
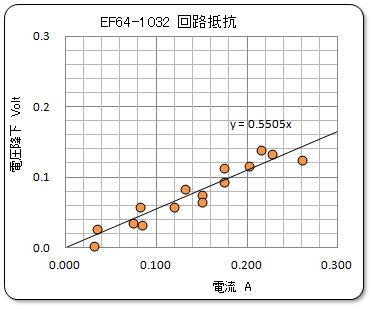
電圧を精度良く測定する必要があったので、デジタル式のテスターを使用し、電流が 250mA 程度まで上げてその時の電圧と電流を測定した。 その結果を右のグラフにしめす。 近似直線の勾配値の精度を上げるため、縦軸と横軸の数値の桁が揃うように電流はA の単位で表示させた。 データは比較的安定しており、目的を達成出来たと思っていたが、電圧降下量が思っていたよりも少ないのが気になっている。 なお、測定中は1/4Wの抵抗と言えども、手では触れないほど熱くなっていた。
しかし、この方式は結果的にNGとなってしまった。 それは、車両特性の測定値から推定する電圧降下量とは、かなり食い違っていたからである。
その2 に続く。