
HOME >> 鉄道模型工学 > モータ特性のモデル化 改良版
モータ特性のモデル化 改良版
■ はじめに
我が実験室では無謀にも鉄道模型の動力車のモデル化に挑戦しています。 いつの間にか、模型のコレクションや走らせて楽しむ事以上に、特性を測定したり、解析したりすることに夢中となってしまいました。 知的興味を楽しんでいると共に、なにしろお金が掛からないので、お財布にとっては有難い事です。 最近では念願であったモータ単体の特性が測定出来るようになったので、手当たり次第に実施しているのが現状です。
そして、その測定データを使って、トルク定数とか逆起電力定数などを推定し、モデル毎の特徴を見出そうと工夫しています。 その方法は、モータの外部から測定出来る特性を使用し、モータの機能を発揮している各定数を推定する方法を行っています。 モータの研究をする訳では無いので、原理的な厳密性を追求するものではありませんが、モータに供給された電圧と電流値からモータの出力トルクと回転数を計算出来れば良いと言う立場です。
鉄道模型のモータは、メーカ毎に、あるいはモデル毎に異なっています。 さらに、個体毎にもバラツキがありますので、これらの定数は製品毎に求める必要がありますので、測定データをもとに、これらの定数を容易に推定する方法を実施してきました。 そしてこの方法を紹介した「モータ特性のモデル化」について、少し改良しましたので、改良版として紹介します。
■ モータの関係式
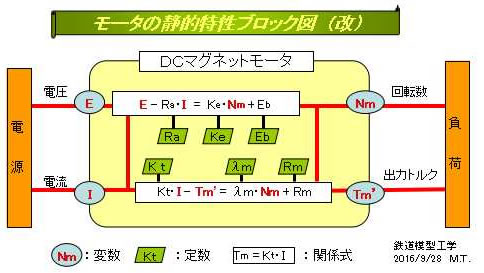
まず始めに、モータの関係式を整理しておこう。 鉄道模型工学概論に記載した関係式と、その後、動力車の調査で追加したモータに関する式を整理して再掲載します。 ここでは、モータなどの慣性を考えていない静特性を考えている。 また、モータのトルクについては、モータの内部回転抵抗を考慮するため、電磁気的に回転子に発生したトルクを「モータトルク」とし、モータの出力軸から取り出せれるトルクを「出力トルク」と呼ぶことにする。
![]()
 .
.
基本特性として、モータトルクを Tm 、コイル電流を I 、トルク定数を Kt とすると、
![]()
で示される。 即ち、モータのトルクはコイル電流に比例し、直接的には外部電圧には依存しないのである。
次に、逆起電力を e 、モータの回転数を Nm 、逆起電力定数を Ke とすると、
![]()
となる。 また、外部電圧を E 、巻線抵抗を Ra 、ブラシ接触部の電圧降下を Eb とすると、
![]()
ちなみに、モータの回転数を Nm を、外部電圧 E と、コイル電流 I を用いて表わすと、①②式より、
![]()
となる。 また、モータの内部回転抵抗、即ちモータ軸損失を速度比例項と一定項で表わすとすると
![]()
で表現でき、その値は、モータトルクと出力トルクの差として現れる。
これらの関係を理解するために、ブロック線図で表現すると、右の図の様になる。
このブロック図は、エネルギー伝達ブロックと理解すれば、より分かりやすい。 モータは、電源から電圧と電流のエネルギーを受けて、負荷に対して回転数とトルクを作用させるエネルギー変換装置である事が分かる。 逆方向に作用すれば発電機となるのことは、ご存じの通りである。
そして、エネルギーは、負荷に応じて供給されることを覚えておこう。 電源は一定電圧を供給するが、電流はモータの負荷に応じて沢山流れたり、わずかしか流れないといった状況を呈するのである。 自分はこのことを 「のれんの腕押し」 と理解している。 腕っ節の強いお相撲さんでも、のれんを押していく時には、その力を必要としないのである。
また、このエネルギー伝達ブロックは、モータに限らず、機械装置や油圧機器など、いろいろな装置やシステムに適応する事ができるが、特徴として、4端子ブロックとなることである。 エネルギーとして表現される、電圧×電流、回転数×トルク、速度×力、圧力×流量、・・・・・・・・・・・など、入力が2端子、出力も2端子の4端子ブロックである。
先回も同様なイラストを紹介したが、そのイラストを整理し直し、上のイラストのように二つの式にまとめてみました。 赤線は外から測定できる変数を示しているが、よく見ると、4端子ある変数は関係式をはさんで、二つのグループに別れることが分かる。 即ち、電圧・電流と回転数、および、電流・出力トルクと回転数のグループである。 そして、前者は定数 Ra、Ke、Eb が関係し、下の変数とは独立していることが分かる。 また、後者についても同様に、定数 Kt、λm、Rm とが関係して上の変数とは独立している。
これは、前者が電圧に関する関係式であり、後者がトルクに関する関係式なのであるが、上に示したイラストの中の式を見ると、右辺が Nm に関する一次式であり、それぞれの勾配と Y 切片が求めたい定数を示している。 そして、左辺は二つの変数と一つの定数から成っているので、その定数を仮定すれば、左辺は測定データ毎に計算出来るのである。 その計算されたデータを、 Nm を横軸に取った散布図で示せば、その勾配と Y 切片が一次近似式より推定できるのである。 即ち、左辺の定数を仮定すれば、それに対応して、他の二つの求めたい定数を直接示唆しているのである。 その上に、二つのグループはお互いに独立しているので、それぞれのグループ単独で計算出来るのである。
次に、仮定した一つの定数と求められた二つの定数のセットが、どれだけ実際と合致しているのかは、求めた定数を使って計算された計算値と実測データを比較して、その相関具合がチェックして行けば、確からしさが確認できるのである。 前者の電圧に関する関係では回転数を、後者のトルクに関する関係では出力トルクをその評価項目にして、計算値と実測値との比較を実施すれば、求める定数の確からしさが確認できるのである。
この理屈を使って、EXCELで計算しながら、4個の変数より、6個の定数を逐次近似法もどきの手法で推定することが出来るのである。
■ 定数の推定の方法
モータ単品で測定した特性データをもとに、モータの特性を決める6個の定数を容易に推定する方法を紹介しよう。
.
1) トルクに関する関係式から定数 Kt 、Rm 、λm の最適値をそれぞれ推定する
回転数 Nm 、電流 I 、出力トルクTm’の関係より、Kt 、Rm 、λm を推定をするものである。 それは、測定された電流 I と回転数Nm より、式①と④を使用して出力トルクTm’を計算し、Tm’の実測値との比較によりもっともよく合致する Kt 、Rm 、λm を求めるものであるが、この3っの定数 Kt 、Rm 、λm を同時に推定しなければならない。 その組み合わせを考えると膨大なケースとなってしまうが、 モータ軸損失トルクの計算式を活用すれば、その制約を回避できるのである。
- まず、モータ軸損失トルクは、前述の④式で表わされるが、①式を使って Tm を消去すると、

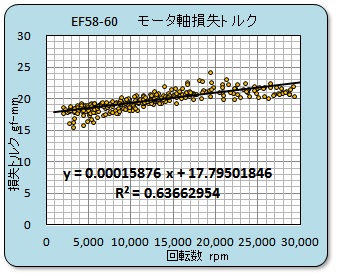
となる。 - ここで、Kt を仮の値に設定し、電流 I と出力トルク Tm’の全ての実測値を使って、上の式の右辺の計算によりモータ軸損失トルクを求めてグラフ化する。 この時に横軸には回転数Nm の実測値を用いている。
- その一例を右のグラフに示す。
- そのプロット点を直線近似させと、この近似式の勾配とY切片の値は上記の式に示されている様に、勾配がλm を、Y切片がRm の値をダイレクトに示しているである。
- このグラフを使用すると、Kt を仮の値に設定すれば、それに対応した最適なλm とRm をEXCEL が自動的に計算してくれるのである。
- そこで、この定数推定値 ( Kt 、Rm 、λm ) のセットと、電流 I 、および回転数Nm の実測値を用いて出力トルクTm’の計算値を下記の式を使用して計算する。

- そして、仮定した定数で計算されたこの計算値と実際の実測値とを比較をすることにより、 もっともよく合致する Kt 、Rm 、λm を求めるものである。
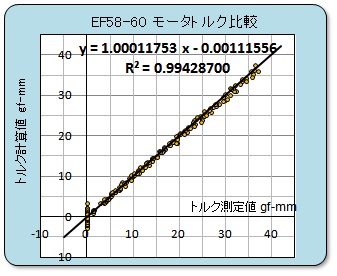
- その評価尺度としては、これまた、出力トルクTm’の計算値と実測値とを、X-Yグラフに表示してその相関を求めることによって、推定値のマッチング具合を評価出来のである。
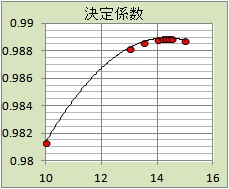
- このX-Yグラフを右に示す。
- そして、右のグラフの勾配、Y切片、および決定係数 R2 の値をグラフ化し、逐次計算のための方向付けをビジュアルにしたものを下に示す。 横軸には仮定した定数 Kt の値を取っている。
- 勾配とY切片は直線的に変化し、決定係数 R2 は2次曲線を示しているが、 計算値と実測値のマッチング具合を評価するには、勾配は1:1に対応していること、即ち1に最も近い事であり、またY切片はゼロ点に最も近い事、さらに決定係数 R2 は 1.000 に最も近いことが評価のポイントである。
- この、評価ポイントが同時に成立すればベストでるが、ここでは勾配、Y切片、決定係数の順に優先順位をつけて判断することにした。
- なお、損失トルクのグラフとトルク比較のグラフにおいて、その勾配とY切片、および決定係数 R2 の計算は、EXCELの中の関数を利用して自動的に計算するように今回から改良した。 これで作業効率が格段に向上したのである。
- 勾配の計算は、 = INDEX(LINEST(H9:H277,F9:F277 ),1,1) で実施し、
- Y切片の計算は、 = INDEX(LINEST(H9:H277,F9:F277 ),1,2) で実施し、
- 決定係数 R2 の計算は、 = INDEX(LINEST(H9:H277,F9:F277,TRUE,TRUE),3,1) で実施したのである。

定数推定の方法は、いわゆる 手動式逐次計算法 である。 ある定数を一つ仮定すれば、EXCELで自動的に計算してグラフ化してくれるので、評価項目により近い値はどちらの方向かを示してくれるのである。
2) 電圧に関する関係式から定数 Ke 、Ra 、Eb の最適値をそれぞれ推定する
同じ考えを定数 Ke 、Ra 、Eb にも当てはめて、デルタ電圧δと勝手に名づけたが、この要素を計算することによって、これらの定数も同様に簡単に最適値が推定出来る。
- ②と③の式より、逆起電力 e を消去すると、

となる。 この式の意味する物理的内容は良く分からないので、デルタ電圧δと勝手に名づけたが、前記の(1)と全く同じ形態となることが分かる。 - 巻線抵抗 Ra を単なる抵抗と考えるならば、Ra・I は電流 I による電圧降下である。 従って電圧δはそれ以外の要素による電圧降下、すなわち電圧の損失分にあたるので、上記のトルク損失と同じようになるのは当然かもしれない。 その損失(?)には、Ke・Nm で示される逆起電力が関係してくるのである。
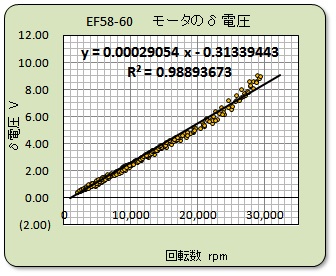
- ここで、Raを仮の値に設定し、電流 I と電圧 E の全ての実測値を使って、上の式の左辺の計算によりデルタ電圧δを求めてグラフ化する。 この時に横軸には回転数Nm の実測値を用いている。
- その一例を右のグラフに示す。
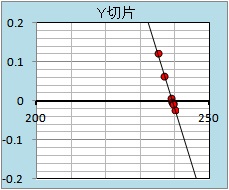
- そのプロット点を直線近似させと、この近似式の勾配とY切片の値は上記の式に示されている様に、勾配がKe を、Y切片が Eb の値をダイレクトに示しているである。
- 本当は、 Eb の値、すなわちブラシ接触部の電圧降下にはマイナス値は無い筈である。 しかし、高速回転部の非線形部分の影響により、データ的にはマイナスとなってしまった。 これを改善するには、20,000 rpm以上のデータをネグレクトして計算させるとよいのである。
- 次に、この定数推定値 (Ra、Ke 、Eb ) のセットと、電圧 E と電流 I の実測値を用いて回転数Nm の計算値を下記の式を使用して計算する。

- そして、仮定した定数で計算されたこの計算値と実際の実測値とを比較をすることにより、 もっともよく合致する Ra、Ke 、Eb を求めるものである。
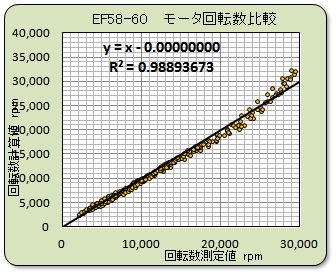
- その評価尺度としては、これまた、回転数Nm の計算値と実測値とを、X-Yグラフに表示してその相関を求めることによって、推定値のマッチング具合を評価出来のである。
- このX-Yグラフを右に示す。
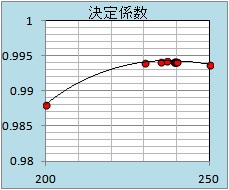
- そして、右のグラフの勾配、Y切片、および決定係数 R2 の値を縦軸にし、横軸には仮定した定数 Ra の値を取ってグラフ化すると、逐次計算のための方向付けをビジュアルに示す事が出来るのあるが・・・・。
- しかし、この電圧に関する式の場合は、逆起電力の影響が大きいために、Excel の自動計算では、殆どが勾配は1に、Y切片は0となってしまうのである。 従って、評価しずらい項目となっている。
- そこで、データのバラツキ具合から計算された相関係数Rの2乗の、決定係数と呼ばれている項目を評価項目として実施した。 1.0 に最も近い Ra の値を推定値とするのである。
3) 推定した定数値の検証
上記の方法で、6個の定数を推定したが、果たして本当に的を得た値であるのかどうを検証して置く必要がある。 そこで、実際の測定グラフの上に、推定した定数値から求めた線図を引いてみて、測定データとどれだけ合致しているのか見ておくと安心である。
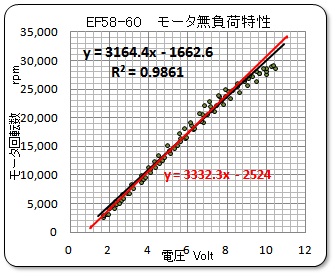
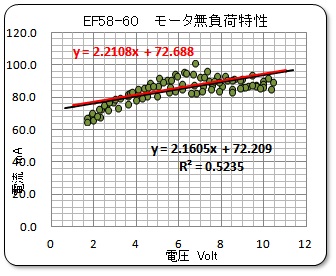
◆ 無負荷特性の比較
まず、モータ単体での無負荷状態での測定データを使って、実測値と計算値の比較を実施する。
- 回転数 Nm の計算式は、①②③④式より、電流 I を消去し、Tm’= 0 を条件として式を整理する。

- 電流 I の計算式も同様に、①②③④式より、回転数 Nm を消去し、Tm’= 0 を条件として式を整理する。

- 下のグラフにて、計算値を赤線と赤字で示す。 実測データとよく合致しているので、推定した定数が確からしい事が分かる。
.
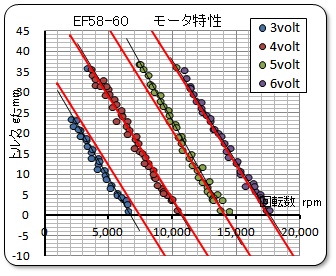
◆ モータのトルク特性の比較
同様に負荷をかけた時のデータも比較する。
- 出力トルク Tm’ の計算式は、①②③④式より、電流 I を消去して式を整理する。

- 出力トルク Tm’ の計算式は、①②③④式より、回転数 Nm を消去して式を整理する。

■ 実際の計算方法
実際の計算方法について説明する。 計算シートは Excel を使用して必要な欄に計算式を埋め込み、計算された値をグラフに表示する。
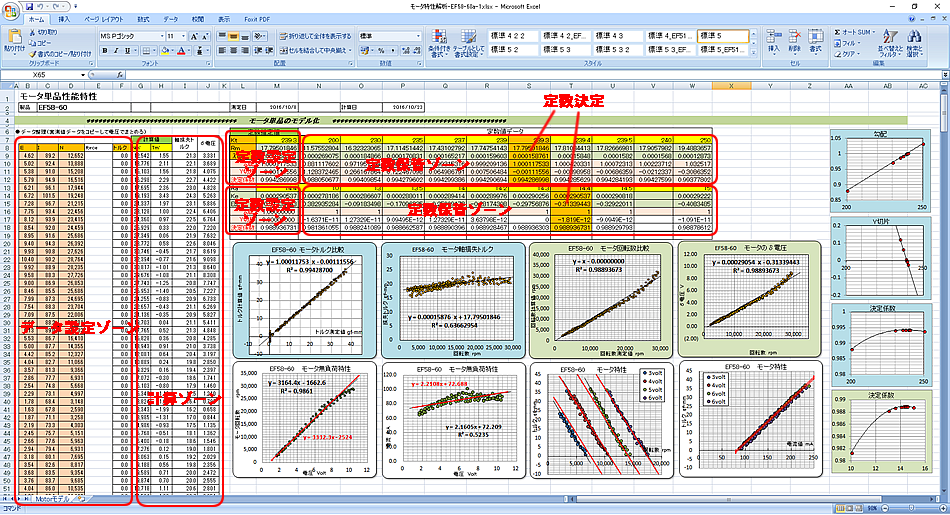
.
この計算シートは、測定データをペーストするゾーン、そのデータから必要項目を計算するゾーン、推定する定数を設定するゾーン、それらの値をメモして置く保管ゾーン、および決定した定数から実測値と比較するための計算ゾーン(図の下の方に隠れてしまったが・・・・・)、関係するグラフの表示ゾーンから成り立っている。
次の、計算手順を説明する。
- 測定データを整理してデータ設定ゾーンに貼り付ける。
- 定数設定ゾーンに、Kt あるいは、Ra の値を適当に設定して関係するグラフの様子を見る。 これで大体の様子を把握したら、小さめの数値と大きめの数値を代入して定数保管ゾーンの両側に値だけをペーストして置く。
- 設定する定数を中間の値にセットして評価項目の内容をチェックする。 そして定数保管ゾーンに値をペーストする。
- そして評価項目のグラフを見ながら、設定する定数の範囲を狭めていく。 手動の逐次近似法である!
- トルクと電圧の関係式は、それぞれ独立しているので別々に検討して行けば良いし、今回は相関係数をなどを自動的に計算するようにしたので、楽々である。
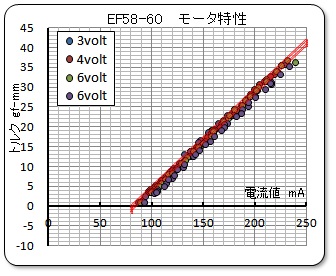
- OKであれば、モータ特性や無負荷特性のグラフにて、実測値と計算値のマッチング具合をチェックする。
- もともと、モータ作動の不安定性や、やや怪しい測定方法の影響で、測定データ自身のバラツキや信頼性への疑問などを念頭において、ほどほどのマッチング具合で良しとすべきでしょう。
■ まとめ
先回の例があるので、ほどほどのマッチング具合で良しとすべきと思っていたが、モータ特性の測定データの向上と計算シートの改善によって、上記のグラフの例で示すように、意外とマッチする定数を推定することが出来るようになった。 まずは今回の取り組みは成功であると評価しよう。
今後は、多くのモータのデータを集めて、モデル毎の特徴を見い出せたらと考えている。
*****************************************************************************
【追記】 2016/10/26
また、この方法で使用した「モータ軸損失トルク」と「モータのδ電圧」のグラフを見ていると、新たな発見がある事に気が付いた。
例えば前者の「モータ軸損失トルク」グラフからは、モータ自身の損失トルクが意外と大きい事が分かる。 出力トルクが30〜40 gf-mm に対して、損失トルクが 20 gf-mm も有るのである。 モータの回転子が発生したトルクの約1/3は自分の摩擦として消えている・・・・・・・? その原因は整流子のブラシ部分の摩擦ではないかと推定するのであるが、不確実である。 また、20,000 rpm 以上では特性が変化しているので、摩擦現象が変化しているのではないかとも考えられる。
一方の「モータのδ電圧」のグラフからは、高速回転部では非線形になっているのがわかる。 それまでは、綺麗な線形を示したいたので、理論どうりの逆起電力が発生していたものの、高速回転では何故非線形になるのだろうか? もしかして、ブラシ部の電圧降下が影響しているのではないだろうか? 高速になるとだんだん電圧降下量が増えてくると考えれば合点がいくのであるが・・・・・・・・。
また、モータ無負荷時の電流・電圧特性での非線形状態は、「モータ軸損失トルク」グラフの形態と類似しているので、原因は軸の摩擦トルクのバラツキが主要因であると考えることが出来ないだろうか?
さらに、測定中に作動音の喧しいモータもあり、その音が途中で変化しているもので見受けられた。 これは明らかに軸の共振現象であり、軸のアンバランスが、ダイナミックバランスも含めた大きいのではないかと思われる。 そのようなモータは、手で持った状態で回転させると、ブルブルと手に感じるのですぐに分かるのである。
などなど・・・・・・いろいろな現象について、あれこれ想定をめぐらすことが出来るが、やはりデータのN増しが必要であり、多くの現象を総合的に判断しないと間違った判断をすることになる。