
HOME >> 鉄道模型工学 > μカーブから発進特性を考える その1
鉄道模型工学 μカーブから発進特性を考える その1
いつも愛読しているさるブログの「物理実験」という記事に注目しているが、いろいろな点で懸念を持ってしまった。そこで、関連する項目について振り返って考察することにした。今回は粘着特性であるμカーブと、それと関連する項目について、復習と考察をまとめてみた。
■ μカーブについて
自動車屋の自分は、現役時代にこの用語をよく見聞きしていた。この「μカーブ」とは、タイヤと路面の関係を示す基本特性であり、スキッドコントロール(ABSなど)やトラクションコントロールの制御理論の基本となっている特性カーブのことである。
一方、鉄道関係ではタイヤが車輪に、路面がレールに変更したと考えれば、特性の基本的考えは同じと言えよう。鉄道の場合、ウィキペディアによると車輪とレールの接触現象を「粘着現象」と言っている。
******** 「粘着式鉄道」 *******
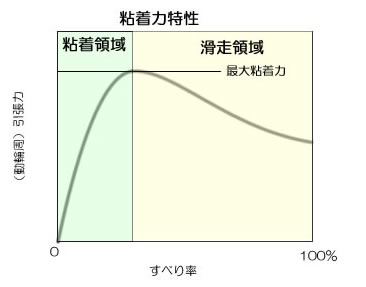
そしてこのμカーブ特性を右のような特性として紹介されている。具体的な数値としてはかなり異なるものの、自動車の場合と鉄道の場合の特性の傾向と特徴は同じと言えよう。
●すべり率について
今回、改めて確認した項目として、横軸となる「すべり率(スリップ率)」の定義の内容である。上記の説明では、”すべり率は、円周速度と車両速度の差を車両速度で割った値として定義される。” と記述されているが、ここで注意すべき点は、発進時の車速はゼロなので、割算の分母として使えないのである。この内容では定義出来なのである。
*****************************************************
 .
.
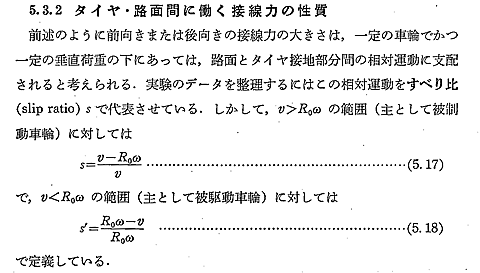
では、自動車の場合はどうだったのだろうかと、昔勉強した教科書を持ち出してきた。 近藤政市工学博士著「基礎自動車工学 −前期編-」 昭和42年第3版、養賢堂出版である。その 111ページの一部のコピーを右に示す。
さすがに大先生であり、ブレーキ状態とトラクション状態を明確に区別して定義されていました。
今回は発進時の挙動を考察するので、ブレーキング時の状態を検討する被制動車輪の場合でなく、動輪による駆動状態を検討するので、トラクション状態、即ち、被駆動車輪の場合の式を使用し、

で定義したすべり率をλとすることにします。
これによって、発進時の車速ゼロの場合もデータが整理出来るのである。
ちなみに、小生が鉄道模型工学として今まで使用してきた内容は、スリップ率について考察する(2014/12/25)にて記述している。スリップ率をβ、車速をV 、動輪直径を D 、動輪の回転数 Nd、とすると、
![]()
としている。すべり率の記号はあえて変更しているが、πD・Ndは円周速度なので、式を変形すると同じ式になることが分かる。 よかった-------!。従って今までの記述は間違っていなことが確認でき、安心して議論を進めることが出来ます。
●引張力について
この(動輪周)引張力は、車輪とレールの間に働く摩擦力を示し、垂直抗力に擦係数を掛けた値として求めることができる。そして、垂直抗力は車輪に掛かっている車体の重量(輪重)なので、その値が決まればこの引張力は求められる。
但し注意しなければならない事は、モータのような動力源ではないので自分で発生する力ではない事である。これはあくまで、動輪に伝えられた力を伝達する能力を示しているに過ぎない。モータなどの駆動力や動輪のブレーキ力が不足している場合には、その力しか伝達しないのである。地面に固定されたレールと空間を移動する車両の間を連結する一種のクラッチ機構なのである。そしてその伝達できる能力を示しているに過ぎないのだ。
■ 粘着領域での挙動
まず、このμカーブの特性を理解するため、走行中の駆動状態で、かつ、状態が安定している粘着領域での挙動を見ていこう。
さらに、下記に示す車両挙動を考える場合、動輪を回転させる駆動トルクは、充分に余裕のある能力を持っているとする。即ち、モータやエンジンのパワーは充分発揮できるパワーを有しているとする。しかし、その時に発揮しているパワーは、作用・反作用の原則により、負荷に応じたパワーしか出していないのである。
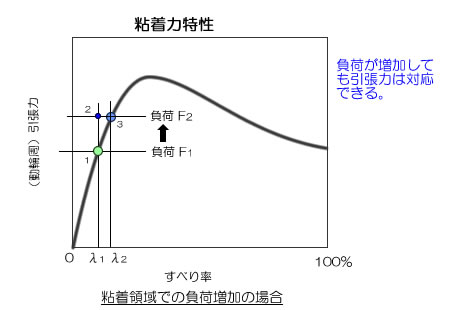
●負荷が増加した場合の挙動
- ポイント1: ある安定した一定速度の走行状態である。この時、列車を走らせている引張力も作用・反作用の原則により、負荷も引張力も同じ力であり、それをF1とする。
- ポイント2: 何らかの要因で負荷がF2に増加したとする。これは列車の車体に掛かる力、即ち抵抗力が増加したことなので、車速は減少することになる。
- ポイント3: 車速が減少するすると上記の式により、すべり率が増加すること、即ち λ1 ⇒ λ2 となったことを意味する。しかし、動輪部の粘着力はその特性により、発揮できる引張力は増加することになり、負荷F2に対応した引張力が発揮できるので、車速は変化するものの、その後も安定した走行が維持できる。
すなわち、負荷が増加しても引張力はそれに対応するので安定した状態を保って走行できることを示している。
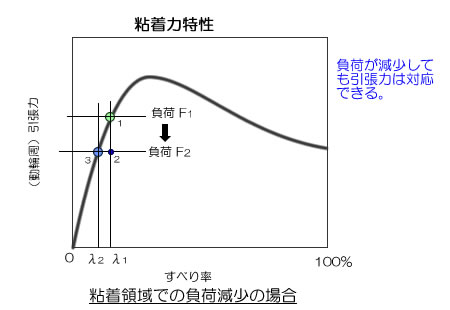
● 負荷が減少した場合の挙動
- ポイント1: ある安定した一定速度の走行状態である。この時、列車を走らせている引張力も作用・反作用の原則により、負荷も引張力も同じ力であり、それをF1とする。
- ポイント2: 何らかの要因で負荷がF2に減少したとする。これは列車の車体に掛かる力、即ち抵抗力が減少したことなので、車速は増加することになる。
- ポイント3: 車速が増加するすると上記の式により、すべり率が減少すること、即ち λ1 ⇒ λ2 となったことを意味する。しかし、動輪部の粘着力はその特性により、発揮できる引張力は減少することになり、負荷F2に対応した引張力でよいので、車速は変化するものの、その後も安定した走行が維持できる。
すなわち、負荷が減少しても引張力はそれに対応するので安定した状態を保って走行できることを示している。
●ま とめ
上記の負荷の増減に応じて引張力の伝達力は増減することになり、これによって安定した走行を維持できることを示している。
もし、モータなどの動輪の駆動トルクが小さい場合、その時の駆動源の駆動力-速度特性に応じた車速となり、すべり率もそれに応じた状態になっているのだ。
■ 滑走領域での挙動
次に、滑走領域での挙動を見ていこう。この領域では安定した状態を保持できないので、滑走領域と呼ばれる所以である。そこで、ある状態の時から変化具合に注目して考えてみよう。すると、何故安定しないのかが理解できるのだ。
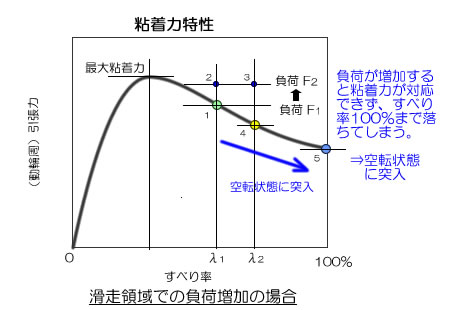
●負荷が増加した場合の挙動
- ポイント1: ある状態の時の走行状態である。この時、列車を走らせている引張力も作用・反作用の原則により、負荷も引張力も同じ力であり、それをF1とする。
- ポイント2: 何らかの要因で負荷がF2に増加したとする。これは列車の車体に掛かる力、即ち抵抗力が増加したことなので、車速は減少することになる。
- ポイント3: 車速が減少するすると上記の式により、すべり率が増加すること、即ち λ1 ⇒ λ2 となったことを意味する。
- ポイント4: しかし、動輪部の粘着力はその特性により、発揮できる引張力は逆に減少するので、車体を加速させる力は減少して車速を下げてしまう。すると、すべり状態はさらに進行する。この状況は変わらないので、すべり率はどんどん増加していく。
- ポイント5: 最終的にはこの状態となる。負荷が増加すると、その負荷F2に対応した引張力が発揮でき無いので、最終的には空転状態に突入する。この場合、動輪を駆動させるパワーは充分にあるものの、車体の速度を維持、あるいは加速させる力は無いので車速はゼロに落ち込んでしまう。動輪だけは回せるので、即ち空転状態になるのである。
- この状態は維持されるので、車輪は空転し、ガリガリとレールや車輪を削っている状態なのだ。
- この状態に陥るのは、最大粘着力の越えた領域で発生し、安定しない領域なので滑走領域と言われている。もし発進時に発生したら動輪のみが空転しているスタック状態であり、走行中に発生した場合は車輪がロックして滑走している状態でなのである。このことから、滑走領域と言われているのだ。
- この状態から抜け出すには、負荷を下げてポイント5よりも小さい状態にする必要があるのである。
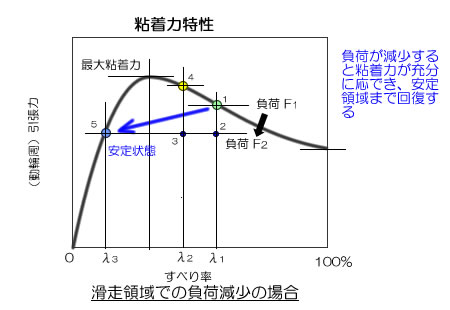
● 負荷が減少した場合
- ポイント1: ある状態の時の走行状態である。この時、列車を走らせている引張力も作用・反作用の原則により、負荷も引張力も同じ力であり、それをF1とする。
- ポイント2: 何らかの要因で負荷がF2に減少したとする。これは列車の車体に掛かる力、即ち抵抗力が減少したことなので、車速は増加することになる。
- ポイント3: 車速が増加するすると上記の式により、すべり率が減少すること、即ち λ1 ⇒ λ2 となったことを意味する。
- ポイント4: しかし、動輪部の粘着力はその特性により、発揮できる引張力は増加するので、車体を加速させる力は増加して車速をどんどん上げてしまう。すると、特性の峠を越えていくも、負荷と引張力は釣り合わず、どんどん状態は進行する。この結果、すべり率はどんどん減少していく。
- ポイント5: 最終的には負荷と引張力が釣り合ったこの状態となり、すべり率λ3の安定した状態となる。
- しかし、この滑走領域に突入する場合とは、負荷が最大粘着力を超えた場合であり、空転状態に入る前に負荷を減少させることはきわめて困難状況である。従って、このような想定の状態はまずあり得ないと考えるべきであろう。
● まとめ
この滑走領域での挙動は不安定な領域ですが、現実ではいろいろな場面で遭遇するのです。タイヤがスタックしてしまい動かなくなる、動輪が空転して発進できない、あるいは峠を越えることが出来ない、雪道でブレーキを掛けたらスリップして崖から落っこちた、などなど、多くの問題を抱えていた。そして、関係する技術者は、長年克服しべき技術課題として研究と改良を進めてきた分野なのです。
その解決方法とは、ABSとか再粘着制御など、コンピュータを用いた制御システムにより、不安定領域をいかに克服するのか、いろいろな手法を使って安定状態になるように制御する高度な技術分野なのです。
*********************************************
上記のような考察を検討している時、ブレーキング状態なのかトラクション状態なのか自分でも混乱してしまいました。
- 車速>円周速度の場合 ⇒ ブレーキング状態 すべり率=100%とは、車輪がロック状態、即ち、円周速度=0で、車速≠0 である。
- 車速<円周速度の場合 ⇒ トラクション状態 すべり率=100%とは、車輪が空転状態、即ち、円周速度≠0で、車速=0 である。
この二つのケースではすべり率の式が異なっていますので、負荷の増減とすべり率の増減方向に注意する必要があります。でも、結果としてすべり率が100%の場合は問題状態なので、いろいろな弊害をひき起こしているのです。
*********************************************
前置きが長くなってしまったが、次回はμカーブの挙動を理解したつもりで、発進時の挙動を考えてみよう。