
鉄道模型実験室 逆流電流を測定する
■ はじめに
超音波距離センサーを使って発進停止特性の測定を検討しているが、今回は停止時の特性に注目する。 動力車が停止する時にはフライホールの影響でモータが回転され、モータが発電機として作用する。 このモータによる発電作用によって電流は架線、否、鉄道模型では線路に戻すように働くので、電流が逆流するはずである。 ところが、この逆流する電流をどうやって測定すれば良いのであろうか?
この逆流電流を如何に測定するか、苦心惨憺した結果を報告しよう。
 .
.
■ 測定方法の検討
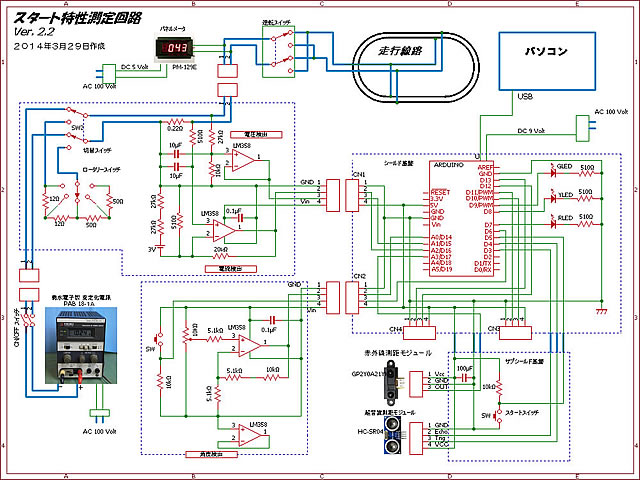
現在使用している測定回路について、復習しておこう。 電圧と電流を測定している回路部分を取り出した回路図を右に示す。
安定化電源から供給された電流は、検出ユニットを通って走行線路に供給され、マイナス側の回路を通って電源に戻ってくる。 この時、検出ユニットに設けた 0.22Ωの抵抗を通るため、そこで降下する電圧値を測定して、電流を測定する。
電圧降下による損失を小さくするため、小さな抵抗を使用しているが、ArduinoのAD変換に掛けるためにオペアンプで増幅している。
停止時のステップ応答では、供給電源をスイッチで切ればよいのであるが、フライホイール付きのモータはその慣性モーメントによって回転を続けている。 そして、モータは発電機として作用することになる。 この場合、逆起電力によって、供給方向とは逆の方向に電流は流れようとするのであるが、その電流は何処に流れるであろうか?
動力車両に前照灯が点灯していればそこに使用されるが、線路を通して戻ろうとする電流も有るはずである。 しかし、スイッチが切られているので、電源には戻れないのである。 測定回路には電圧を測定するための回路があり、この回路を通る可能性もあるが、15KΩと高抵抗である。 しかも電流検知抵抗を逆の方向に流れる。
さらに、停止時のステップ応答の条件として、モータブレーキ回路をどうしようかと悩んだ。 スイッチを切ると電力供給回路はオープン状態になるが、実際の電車では電気抵抗によるブレーキを作用させている様である。 更に回生ブレーキなども実用化されているので、このブレーキ特性も面白そうである。 そこで、スイッチを切るだけのオープン回路ではなくて、何らかの抵抗が挿入された状態でのステップ応答も実験してみたくなる。 そのために細工もしておきたくなる。 安定化電源からの供給側に、切断スイッチと共に、抵抗回路に接続するようにしておけば、ブレーキ回路が構成出来るはずである。
すると、ブレーキ回路を通して電流が逆流して来るので、どうしても逆方向に流れる電流値を検知する回路が必要となってくるのである。 流れる電流が正電流の場合は、 電流検知用の抵抗の前端でプラスの値を示し、オペアンプにはプラスの電圧が入力される。 オペアンプで増幅されるが、単電源でのオペアンプであり、ArduinoのAD変換もプラス電圧しか受け付けない。 逆電流の場合はオペアンプにマイナス電圧が掛ってしまうのである。
オペアンプの使い方をネットで探していると、バイアス電圧を掛けている例を見つけた。 単電源でのオペアンプを使用して交流信号を増幅している例である。 この回路を参考にして真似てみることにした。
こうして検討した回路を下に示す。 走行線路に供給される前には走行方向を逆にするスイッチも設けている。
■ 新しい電圧・電流検知ユニットの製作と検討
現在の回路は静特性の測定時に使用出来るのでそのままにし、上の回路に従って新しく検知ユニットを作ることにした。 しかし、残念ながら正常に作動しなかった。
- 電圧がゼロの時、Arduinoがハングアップする。 スタート時のステップ応答は電圧がゼロの状態から測定を始めるので、最初から5回ほど送信して止まってしまうのである。これでは使用出来ない。
- 電圧を少し上げた(0.6Volt以上)状態では正常に送信する。
- 電流検知回路のバイアスを切ると正常に作動する。
- バイアス電圧が高い事に気が付き、0.020Voltになるように抵抗値を変更するも、ゲインが出ていない上に、バイアスが逆に出ている事に気がつく。
ユニバーサル基板上で構成した回路をいろいろ変更すのは大変なので、ブレッドボードを使って、オペアンプの使い方を始めから検討することにした。
 .
.
 .
.
構成した回路を下記に示す。 まず不具合の状態の回路を「テスト1」と構成した。
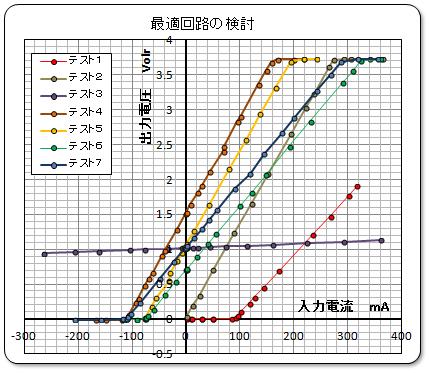
供給電源には安定化電源を使用し、オペアンプの5Volt電源はスイッチングACアダプターを使ってピンジャックから供給した。 供給電流は安定化電源の電流表示を読み取り、出力としてのオペアンプ出力電圧はテスタで読み取った。
その結果を右下のグラフに示す。 電流は100mAから立ち上がっている事がわかる。 これではマイナス電流は測定出来ないのは明らかである。
オペアンプの解説を読んでいると、オペアンプはプラスとマイナスの両入力端子の差が無くなるように出力するとのことである。
ここで、マイナス電圧が掛ってしまう逆流電流を測定するためには、基準となるマイナス側の入力端子には、マイナス電圧を掛けなければならない事に気が付いた。
でもどうやってマイナス電圧と作りだすのか? 今回使用している単電源オペアンプでは無理なのだろうか? Arduinoにはマイナス電源は無いし・・・・・・・・・。
苦肉の策としてボタン電池を使用するアイディアが浮かんだので、早速トライしてみた。 左図の様に回路を構成してマイナス基準電圧を作る事にした。 3Volt のボタン電池による電流は 3個の27KΩ を一周し、オペアンプのGNDより 1Volt 低い電圧をオペアンプの入力側に提供すると踏んだのである。
この結果を「テスト3」としてグラフに示す。 ゲインは滅茶苦茶であるが、マイナス側の電流を見事に測定している様子が示されている。 なお、マイナス電流の場合は、安定化電源からの接続を逆にして実験している。 これで、マイナス電流を測定することが可能であることが判明したので、ゲイン調整を実施することする。 ここでまた勘違いをしている事に気が付いた。
基準電圧は -0.02Volt 程度の小さい値が求められているのである。 そこで右に示す「テスト4」の回路を構成して測定した。 見事に、-100mA 〜+150mA まで測定可能となったが、上限は300mAまで測定したいので、「テスト5」の回路を作って実験した。 オペアンプのマイナス側入力端子の電圧は、オペアンプを作動させない状態で測定すると、テスト4では -0.025Volt 、テスト5では -0.017Volt であった。 なお、この電圧は、オペアンプを作動させると 0Volt になっている。 これがオペアンプの特徴と理解した。
あとは、最適なバイアスとゲインを得るために「テスト6」と「テスト7」を実施して、テスト7の設定を採用することにした。
ボタン電池の寿命が気になるが、殆んど電流を消費しないので心配ないと判断している。 でも、使用しない時は回路を切断するためのスイッチを入れておこう。
また、基準電圧の安定性、即ちバイアス電圧のドリフトは、スタート時点の電圧、電流がゼロの状態を観察すれば判断出来るので、EXCEL側で修正すれば対応出来ると考えた。
■ 新しい電圧・電流検知ユニットの修正と較正
ブレッドボードでの検討結果をもとに、検知ユニットを修正工作を実施した。 最終的に設定した回路を下に示す。 なお、電圧と電流の入力部には脈動吸収のために 100μFのコンデンサを挿入しているが、ステップ応答への影響を心配して 10μFに変更している。
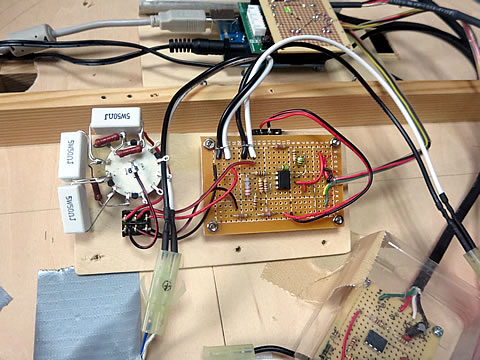
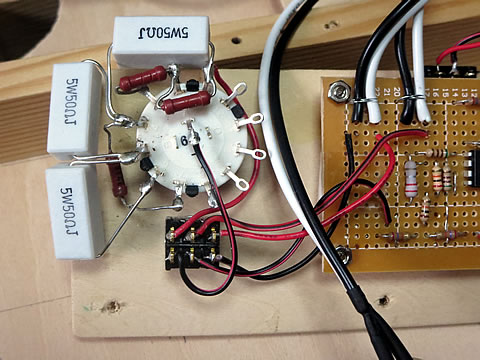
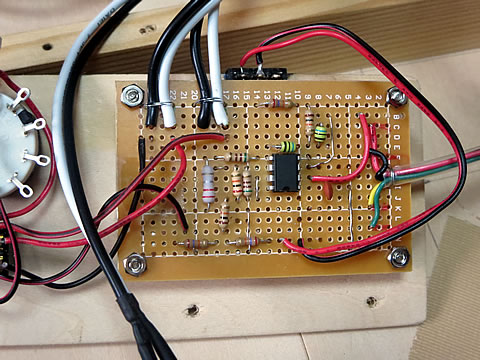
外観を左下の写真に、その裏側を右下に示す。 何時ものようにユニバーサル基板に回路を構成し、スイッチ類はベニヤ板に取り付けてある。
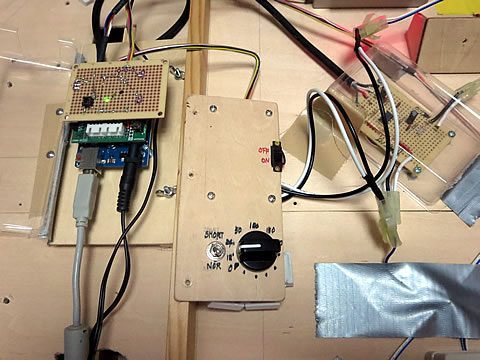
ブレーキ回路用の抵抗は、ロータリスイッチ回りに取り付けた。 5W抵抗は大きすぎた様です。 ネットで注文したのでその大きさが判らなかった為です。 その後、アメ横で 1W 仕様の抵抗を入手したので、こちらを使用してスマートに組む付けた。 しかし、組付け後テスターでチェックすると値が変であった。 残っている部品をチェックするとなんと150Ωであった。 袋には50Ωと書いてあったので信用してそのまま使用したのですが、ダマサレテしまったのである・・・・・・・! 仕方なくネットで注文した5Wの大きな抵抗を使用している。 組付けた構成は回路図とは少し異なり、0Ω、12Ω、24Ω、50Ω、100Ω、150Ω、200Ω、解放の8段階のノッチが選択出来るようになっている。
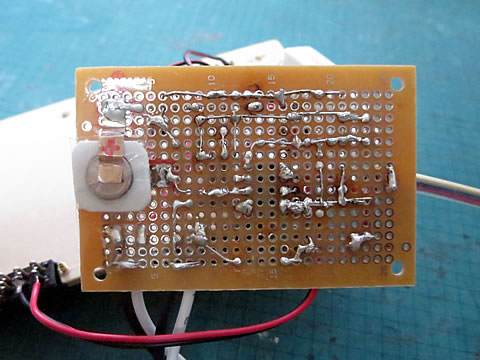
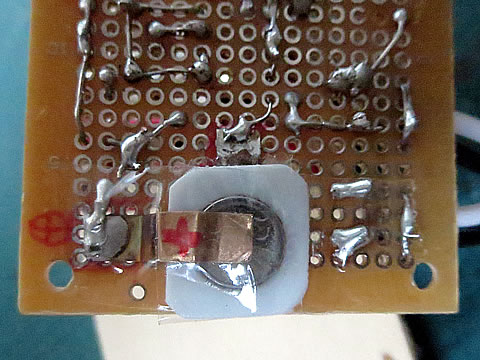
ハンダ面は、部品の取り外しを何度も実施したので、ダンゴハンダになっています。 お見せ出来る状態ではないのですが、ボタン電池の装着状態を紹介したかったので下に記載しました。 0.1mm のリン青銅板を使って電極を作り基板にハンダ付けしています。 電池のホルダーは 1.5mm のプラ板を加工しています。 そして上からセロテープを貼って全体を固定しています。
新しい電圧・電流検知ユニットを取り付けた測定台の様子を下に示す。 以前のユニットとは同じコネクタ接続を踏襲しているので、容易に交換出来るようにしている。
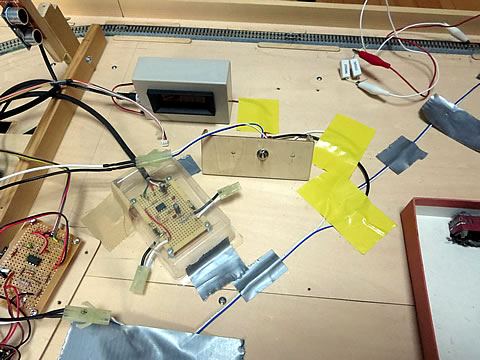
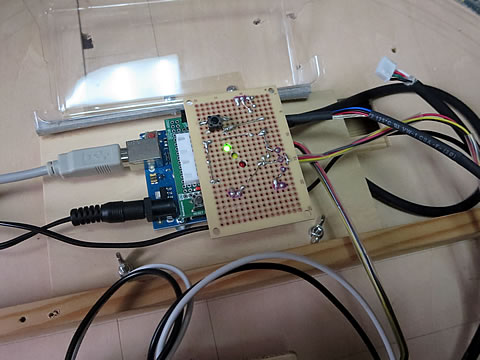
そして、Arduinoのシールドは以前の物をそのまま使用出来ており、その上にさらに距離センサー用の基板を載せています。

新しい検知ユニットの較正を実施するために、動力車の代わりとして線路上に負荷を接続しています。 丁度 5W50Ωの抵抗を入手しているので早速使用しています。
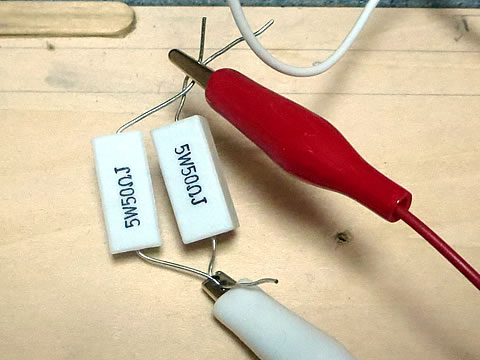
安定化電源や、Arduinoの電源、パソコンなどを接続して、新しい検知ユニットの較正を実施した。 電圧値は測定台のパネルメータの値を、電流値は安定化電源の電流表示値を用いて、Arduinoの出力情報を較正した。 較正実験のデータを下に示す。 指示値とはAD変換後の数値を意味している。
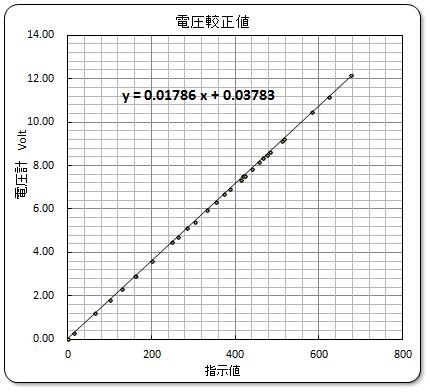
電圧検知回路は基本的には以前のユニットと同じ構成であるが、部品などの値の違いにより係数が少し異なっている。 やはり、組上がった状態で較正するのは正解のようである。 ゼロから12ボルトまで測定可能である。 また、表示されたグラフを見ると、プロット点と近似直線が少しズレているようであるが、これはEXCELの表示のクセであり、表示を拡大するとプロット点の中心を貫いていることが確認出来る。
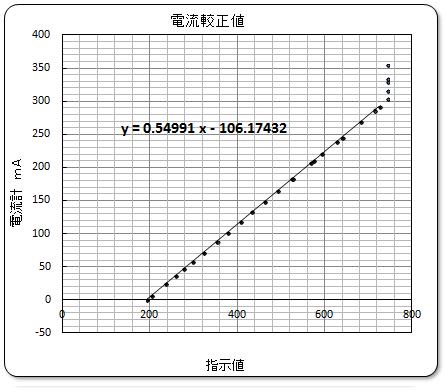
電流検知回路では、狙い通りの特性を示している。 マイナス側の値は供給出来なかったので較正出来ていないが、リニアにそのままマイナス側に延びていると信じているので、確認する必要は無いと判断している。 それはブレッドボードの実験結果が裏付けとなっている。 また、290mA で頭打ちなっているが、オペアンプの上限値であり、ここまで測定出来れば充分であると考えている。
 .
.
■ テスト走行実験
道具が揃ったので、早速ステップ応答の実験してみることにした。 試験車両はEF81-119号機である。 まず、電気機関車EF81-119号機を単独で走行させて、スケールスピードが100Km/h になるように供給電圧を設定する。 速度測定は、今までの検出ユニットが使用できないので、以前使用していた右の写真に示す速度計を使用した。
そして、反射板車両を連結させて、スタート位置に停車させて置き、ブレーキ回路用のノッチは、12Ωに設定し測定の準備を整えた。 計測系をスタートさせてから供給側のスイッチをONさせて車両をスタートさせた。
直線路から曲線路に入ると逆転スイッチにより後退走行にし、その後、切替スイッチによりブレーキ回路に変更して停車させた。
この時の測定結果を下のグラフに示す。
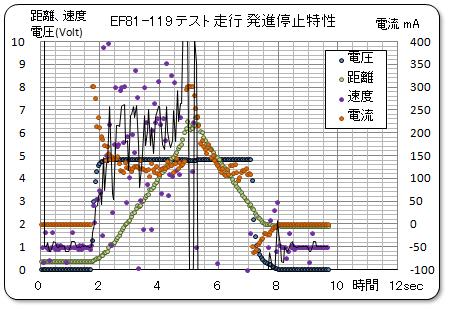
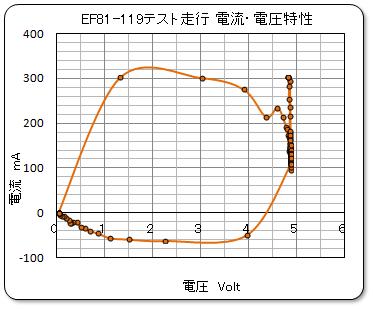
距離データが山形になっているのは、途中で進行方向を逆転させたからである。 そして、右のグラフに示す電流・電圧特性を見ると、停止時の逆電流を測定している事が明確に表示されている。 ゼロ点からスタートして電圧5ボルト近くまで山形に推移しているのがスタート時の様子である。 測定限界の300mAを超えているのでもっと跳ね上がっているのかも知れない。 その後、進行方向が逆転する時にも電流が跳ね上がっているが、これも当然かもしれない。 そしてバック走行に入るが、供給電圧と電流の方向は今までと同じなので、前進時と同じ値で推移し、いよいよブレーキ状態に突入する。 この時、電流は逆方向に流れ、電気ブレーキが作用している事を示している。 ゼロ点近くの電流と電圧の勾配を観察すると、1ボルト当り、0.06〜0.08A の変化勾配であるので、ブレーキ回路の抵抗値とほぼ一致する。
やったぜ・・・・・・!
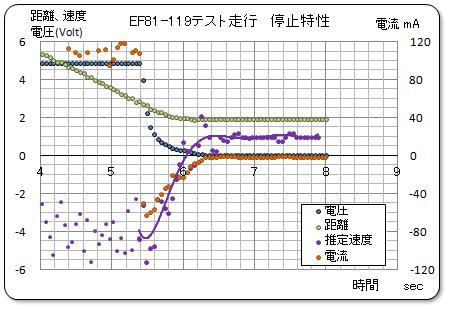
発進時と停止時を拡大したグラフを下に示す。
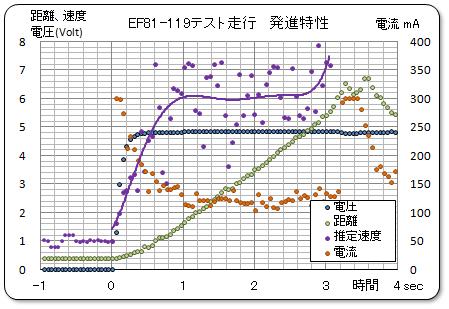
発進時の特性は、先回の報告結果と類似したパターンであるが、電圧の立上がりが早くなっている。 やはりコンデンサの影響が大きかったと判断する。 10μF でも大きいかも知れないが、取りあえずこれでOKとしておこう。
推定速度に関しては、グラフ上で重ねて表示のために、表示値はスケール速度の1/200 とし、さらに +1のゲタを履かせている。 従って、上記のグラフからは、ゼロからスタートして 100Km/h に収束している事を示している。 近似曲線もその様子をバッチリト表示している。
次に停止時の特性は、後退走行しているため速度データマイナス側になり、グラフを見難くくしている。 これは失敗なり! 推定速度も 100Km/h から0Km/h に収束している事が読み取れる。
■ まとめ
なんとか停止時の逆流電流を測定することが出来た。 これによって発進時だけなく停止時でもステップ応答の挙動を観察出来るようになったと考えており、フライホイールの効果を何とか比較出来るのではないかと思っている。 測定手順や解析方法を整理しておき、いろいろな車両を測定して来たいと考えています。 さらに、ブレーキ回路での抵抗値による違いなども興味深々であり、実験結果を何時か報告しよう。
今回のテーマは、電気関係に詳しい方なら簡単な問題であったろうと思われるが、機械屋の小生にとっては四苦八苦であった。 でも電気って面白いと感じた工作と実験であり、至福な時間を過ごすことができました。